



Moteur LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encodeur 18 bits, Contrôleur DF70V2 pour robots
Moteur LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encodeur 18 bits, Contrôleur DF70V2 pour robots
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MF7010-V2 Moteur est un moteur pour joints de robotique et d'automatisation, offrant une communication RS485 ou CAN (avec le driver DF70V2 recommandé) et un encodeur magnétique intégré. Il est spécifié en deux options de bobinage (23 tours / 45 tours), toutes deux évaluées à 24V, avec un support de température du moteur et un encodeur magnétique de 18 bits.
Caractéristiques clés
- Conception intégrée avec intégration mécanique-électrique
- Haute précision de contrôle (encodeur magnétique de 14 bits référencé dans le matériel de caractéristiques)
- Sortie de couple élevée avec un aimant permanent RbFeB haute performance (formulation du matériel de caractéristiques)
- Conception légère avec conception aplatie d'alliages d'aluminium aérospatial (formulation du matériel de caractéristiques)
- Conception à rotor externe
- Conception d'arc multi-étapes à aimant permanent
- Écart d'air plus petit ; magnétisation radiale
- 0.2 mm feuille d'acier au silicium
- Fil émaillé isolé classe H
- Matériau de grade SH NdFeB (formulation de matériau)
- Logiciel de programme fourni pour ajuster les paramètres, tester et mettre à niveau ; prend en charge le développement open source tel que PC, MCU, PLC, ICP et RPi
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Caméra PTZ
- Systèmes Laser LiDAR
- Robots d'inspection de centrales électriques
- Équipement d'inspection industriel
Spécifications
| Paramètre | MF7010-V2 (23 tours) | MF7010-V2 (45 tours) |
|---|---|---|
| Nom de l'article | MF7010-V2 | MF7010-V2 |
| Tours | 23 | 45 |
| Tension nominale | 24V | 24V |
| Vitesse max | 1230 RPM | 620 RPM |
| Couple nominal | 0.61 N.m | 0.63 N.m |
| Vitesse nominale | 940 RPM | 400 RPM |
| Courant nominal | 3.3 A | 1.75 A |
| Puissance maximale | 104 W | 31 W |
| Couple maximal | 2 N.m | 2.1 N.m |
| Constante de vitesse | 39 rpm/V | 16.7 rpm/V |
| Constante de couple | 0.18 N.m/A | 0.36 N.m/A |
| Type d'enroulement | Y | Y |
| Résistance de phase | 0.71 ohm | 2.73 ohm |
| Inductance de phase | 0.86 mH | 3.3 mH |
| Poles du moteur | 28 | 28 |
| Inertie du rotor | 748 gcm^2 | 748 gcm^2 |
| Température du moteur | OUI | OUI |
| Charge nominale du roulement | 330 N | 330 N |
| Poids du moteur | 278 g | 278 g |
| Conduite recommandée | DF70V2 | DF70V2 |
| Tension d'entrée du moteur | 7.4-32V | 7.4-32V |
| Communication | RS485 ou CAN | RS485 ou CAN |
| Fréquence de communication | RS485 : 500 Hz (115200 bps) / CAN : 2 kHz (1 Mbps) | RS485 : 500 Hz (115200 bps) / CAN : 2 kHz (1 Mbps) |
| Encodeur | Encodeur magnétique 18 bits | Encodeur magnétique 18 bits |
| Débit de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps |
| Débit (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24 kHz) / Boucle de vitesse (8 kHz) / Boucle de position (8 kHz) | Boucle de couple (24 kHz) / Boucle de vitesse (8 kHz) / Boucle de position (8 kHz) |
| Courbe d'accélération | Accélération trapézoïdale | Accélération trapézoïdale |
Manuels
Pour des questions de compatibilité avant-vente (sélection de l'entraînement, configuration RS485/CAN, configuration du baudrate) ou pour de l'aide sur la documentation, contactez [email protected] or visitez https://rcdrone.top/ .
Détails
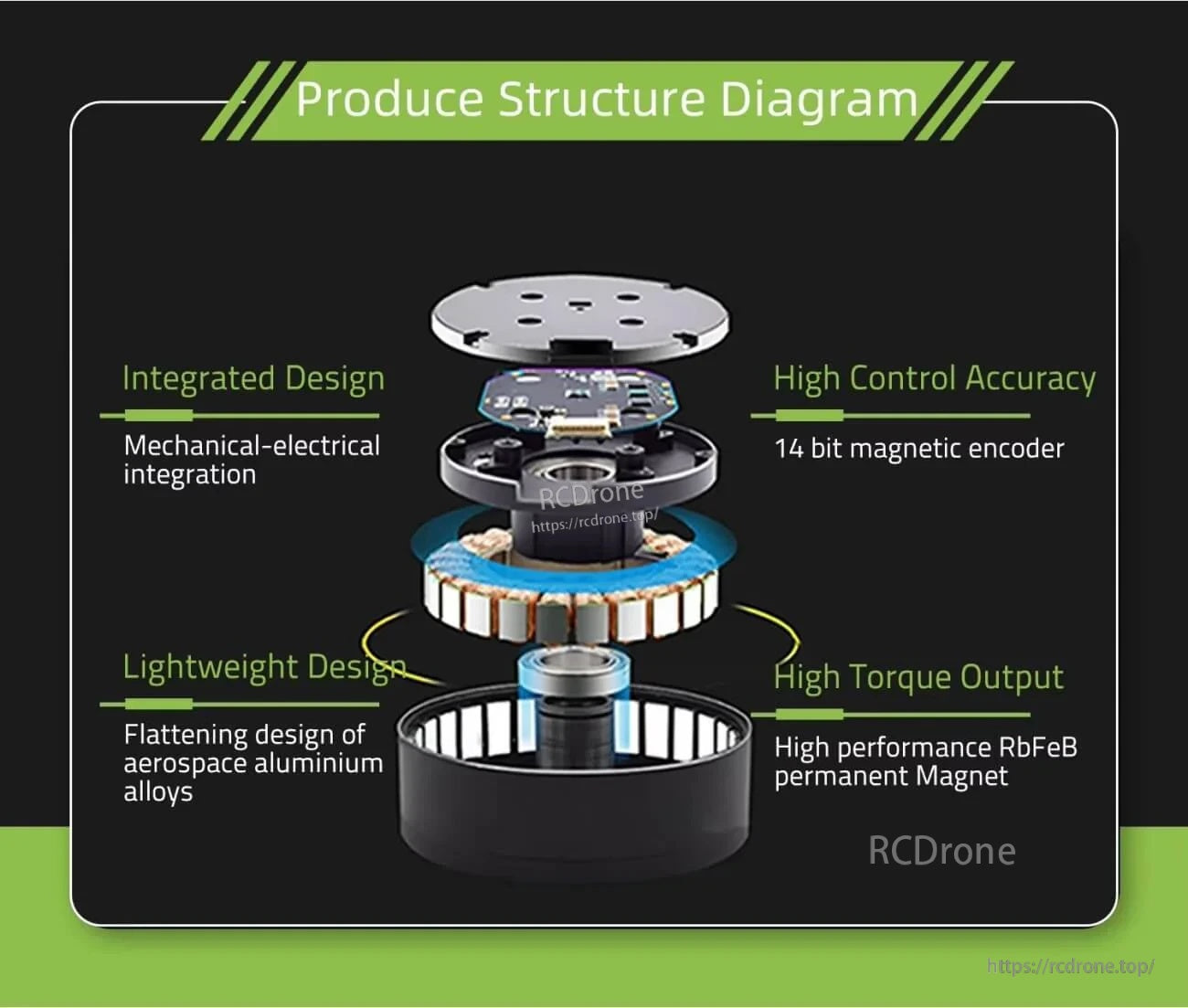
La construction mécanique-électrique intégrée maintient l'actionneur compact tout en soutenant un contrôle précis en boucle fermée pour les articulations de robot.
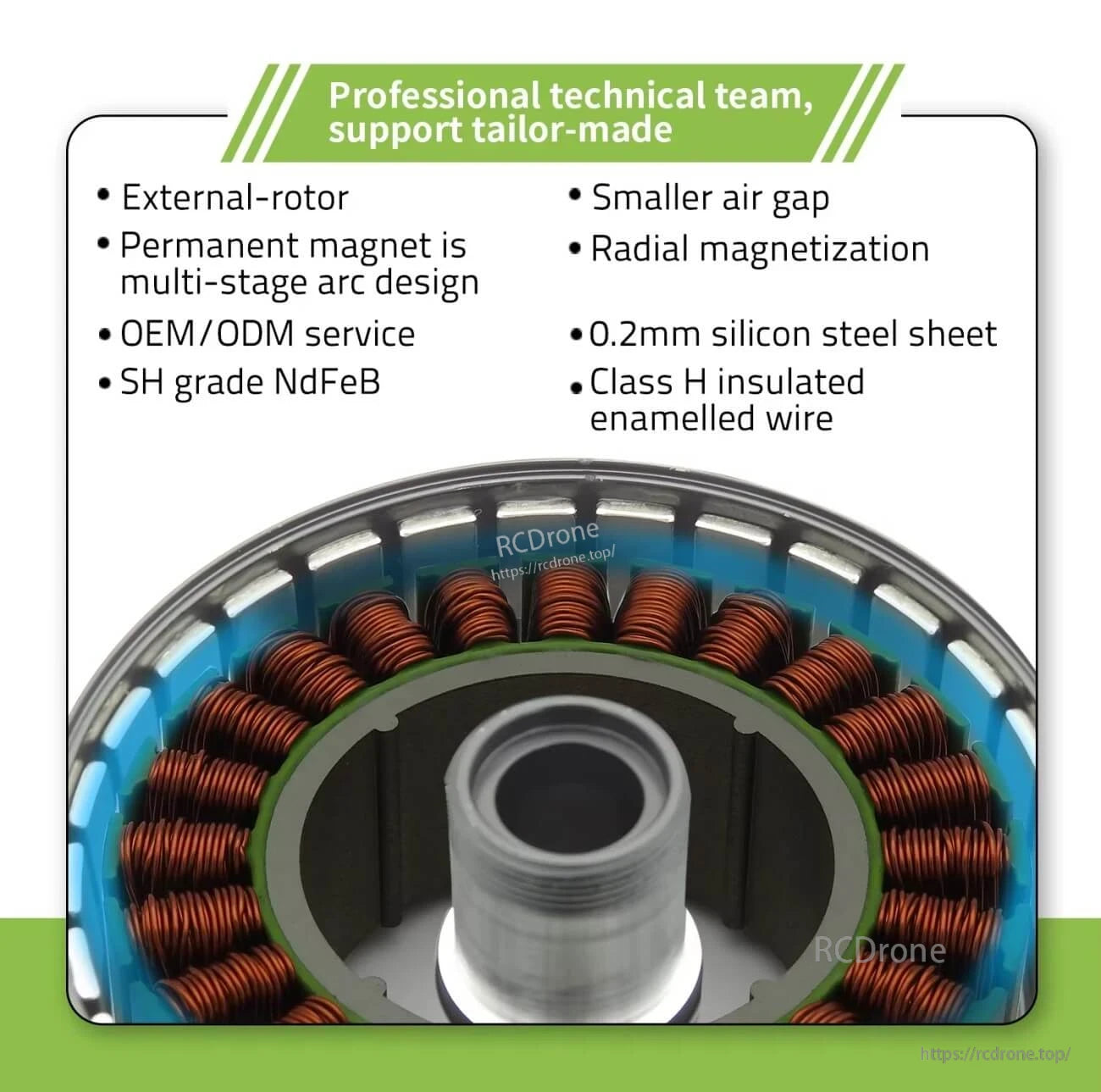
La disposition à rotor externe et le design à faible écart d'air aident à fournir un couple réactif dans un format de moteur d'articulation léger.
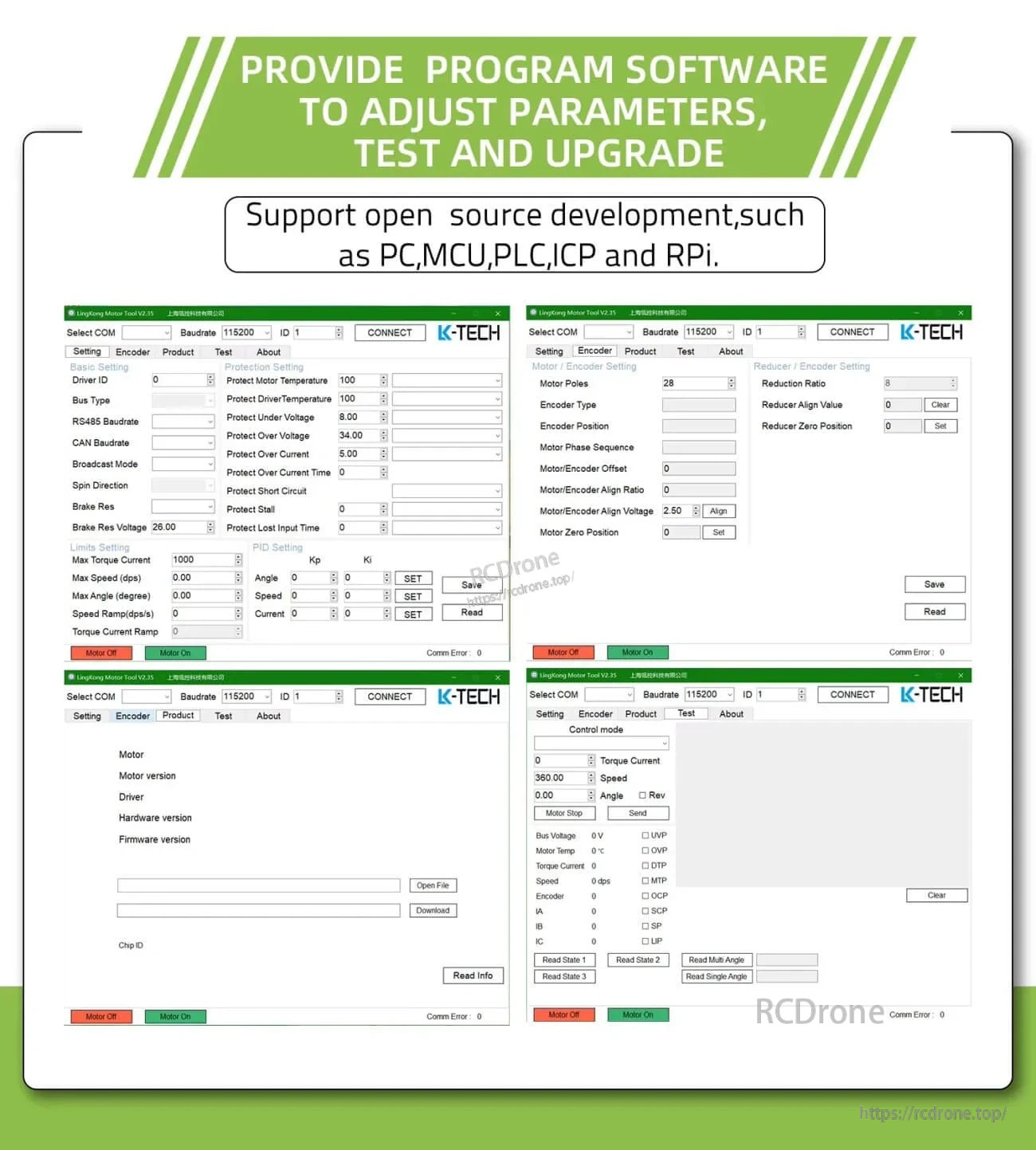
Un logiciel PC est disponible pour la configuration des paramètres, le diagnostic et les mises à jour du firmware lorsqu'il est utilisé avec l'entraînement DF70V2 recommandé.

Related Collections



