



Moteur LKMTECH MF9010-V2 24V Servo intégré à couple élevé avec encodeur 18 bits, RS485/CAN, variateur DF70v2
Moteur LKMTECH MF9010-V2 24V Servo intégré à couple élevé avec encodeur 18 bits, RS485/CAN, variateur DF70v2
LKMTECH
Impossible de charger la disponibilité du service de retrait
Présentation
Le LKMTECH MF9010-V2 est une solution de moteur intégrée conçue pour des applications nécessitant un design léger, une grande précision de contrôle et un couple élevé. Le MF9010 v2 comprend des mises à jour de produit telles que la résolution de l'encodeur améliorée de 14 bits à 18 bits, l'optimisation du couple de cogging, le support d'entrée PWM et la communication CAN/RS485 avec une variété de débits en bauds.
Caractéristiques clés
- Conception intégrée ; conception légère ; haute précision de contrôle ; sortie de couple élevée
- Résolution de l'encodeur : 14 bits mise à niveau vers 18 bits
- Optimisation du couple de cogging
- Prend en charge l'entrée PWM
- La communication CAN et RS485 prend en charge une variété de débits en bauds
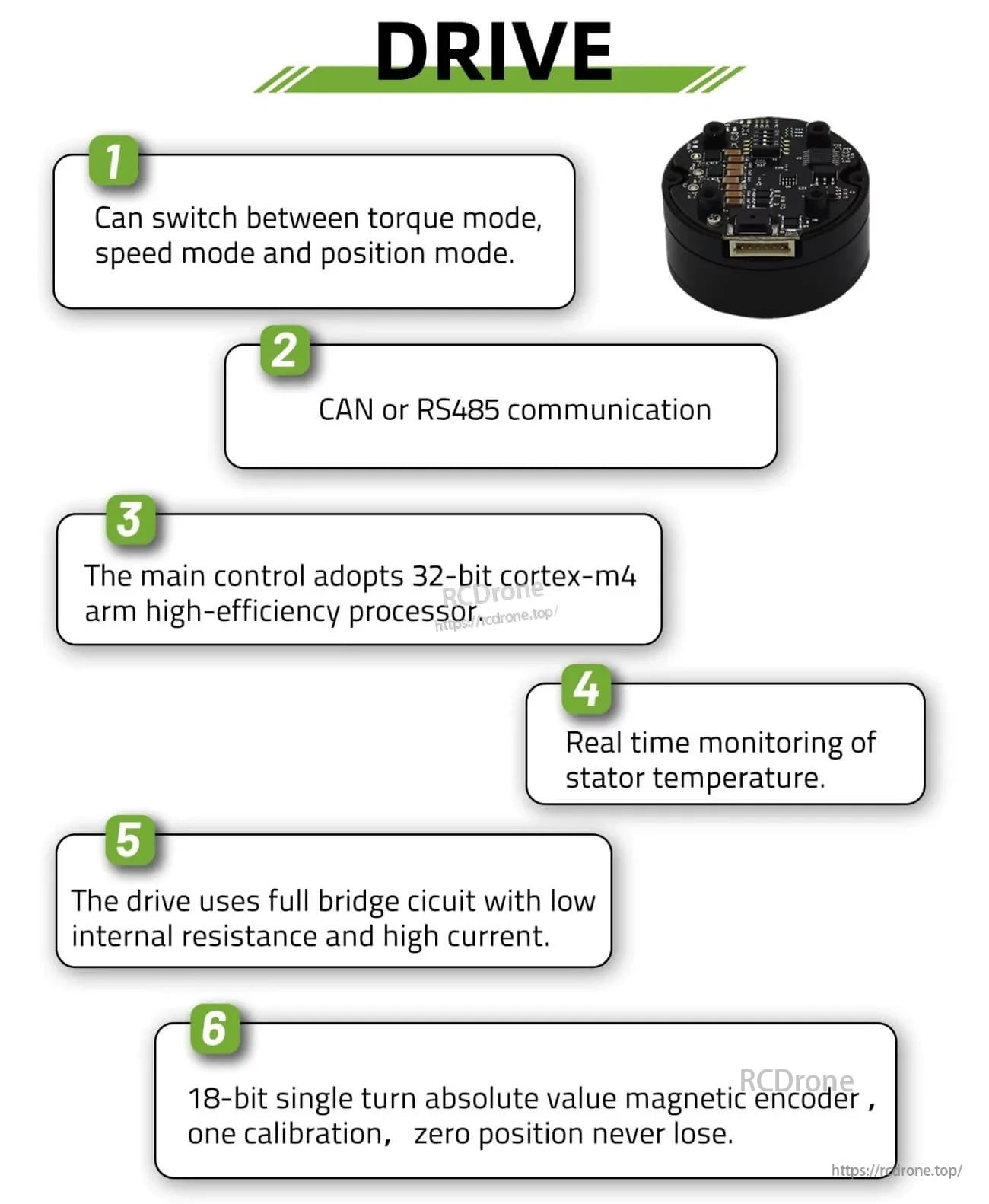
- Le drive peut passer entre le mode couple, le mode vitesse et le mode position
- Le contrôle principal adopte un processeur ARM cortex-m4 à haute efficacité de 32 bits
- Surveillance en temps réel de la température du stator
- Le drive utilise un circuit en pont complet avec une faible résistance interne et un courant élevé
- Encodeur magnétique absolu à valeur unique de 18 bits ; une calibration ; position zéro jamais perdue
- Logiciel de programme fourni pour ajuster les paramètres, tester et mettre à niveau
- Prend en charge le développement open source, tel que PC, MCU, PLC, ICP et RPi
Applications
- Robots humanoïdes
- Bras Robotiques
- Exosquelettes
- Robots Quadrupèdes
- Véhicules AGV
- Robots ARU
- Caméra PTZ
- Laser Lidar
- Robot d'Inspection de Station Énergétique
- Inspection Industrielle
Spécifications Techniques
| Paramètre | MF9010v2 (17 Tours) | MF9010v2 (35 Tours) |
|---|---|---|
| Nom de l'Article | MF9010v2 | MF9010v2 |
| Tours | 17 | 35 |
| Tension Nominale | 24V | 24V |
| Vitesse Maximale | 1465RPM | 690RPM |
| Couple Nominal | 1.09N.m | 1.07N.m |
| Vitesse nominale | 1080RPM | 450RPM |
| Courant nominal | 6.66A | 3.27A |
| Puissance maximale | 215W | 128W |
| Couple maximal | 2.2N.m | 4.1N.m |
| Constante de vitesse | 45rpm/V | 18.8rpm/V |
| Constante de couple | 0.16N.m/A | 0.33N.m/A |
| Type d'enroulement | Y | Y |
| Résistance de phase | 0.29Ω | 1.15Ω |
| Inductance de phase | 0.53mH | 3mH |
| Poles du moteur | 28 | 28 |
| Inertie du rotor | 2860gcm² | 2860gcm² |
| Température du moteur | OUI | OUI |
| Charge nominale du roulement | 650N | 650N |
| Poids du moteur | 525g | 525g |
| Conduite recommandée | DF70v2 | DF70v2 |
| Tension d'entrée de la conduite | 7.4-32V | 7.4-32V |
| Communication | RS485 OU CAN | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 18 bits | Encodeur magnétique 18 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (8KHz) | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (8KHz) |
| Courbe d'accélération | Accélération trapézoïdale | Accélération trapézoïdale |
Courbe caractéristique du moteur (Référence)
- Courbe caractéristique du MOTEUR légendes : Courant d'entrée DC, Efficacité, Puissance de sortie, Couple de sortie
- Étiquettes de courbe affichées : MF9010-17T et MF9010-35T
Manuels / Documents
Pour des conseils de sélection et un support d'intégration, contactez [email protected] or visitez https://rcdrone.top/ .
Détails

Le MF9010 V2 combine moteur, encodeur et intégration prête à l'emploi pour des constructions compactes nécessitant un contrôle de mouvement précis et à couple élevé.
Les modes de contrôle multiples et la connectivité CAN/RS485 facilitent le réglage de l'actionneur pour différents joints de robot et axes d'automatisation.
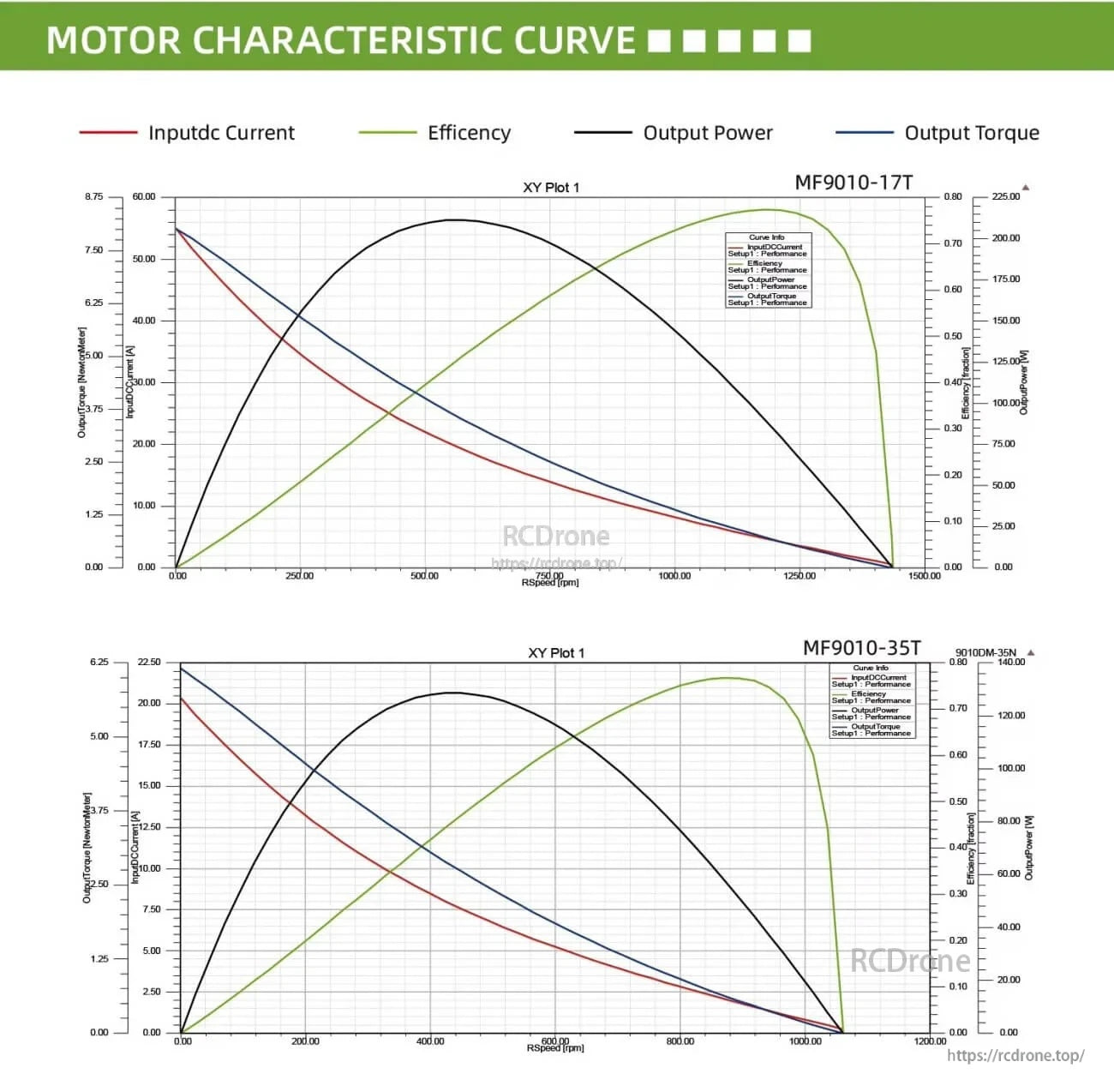
Les courbes de performance aident à comparer les enroulements à 17 tours et à 35 tours pour votre vitesse cible, couple et plage d'efficacité.
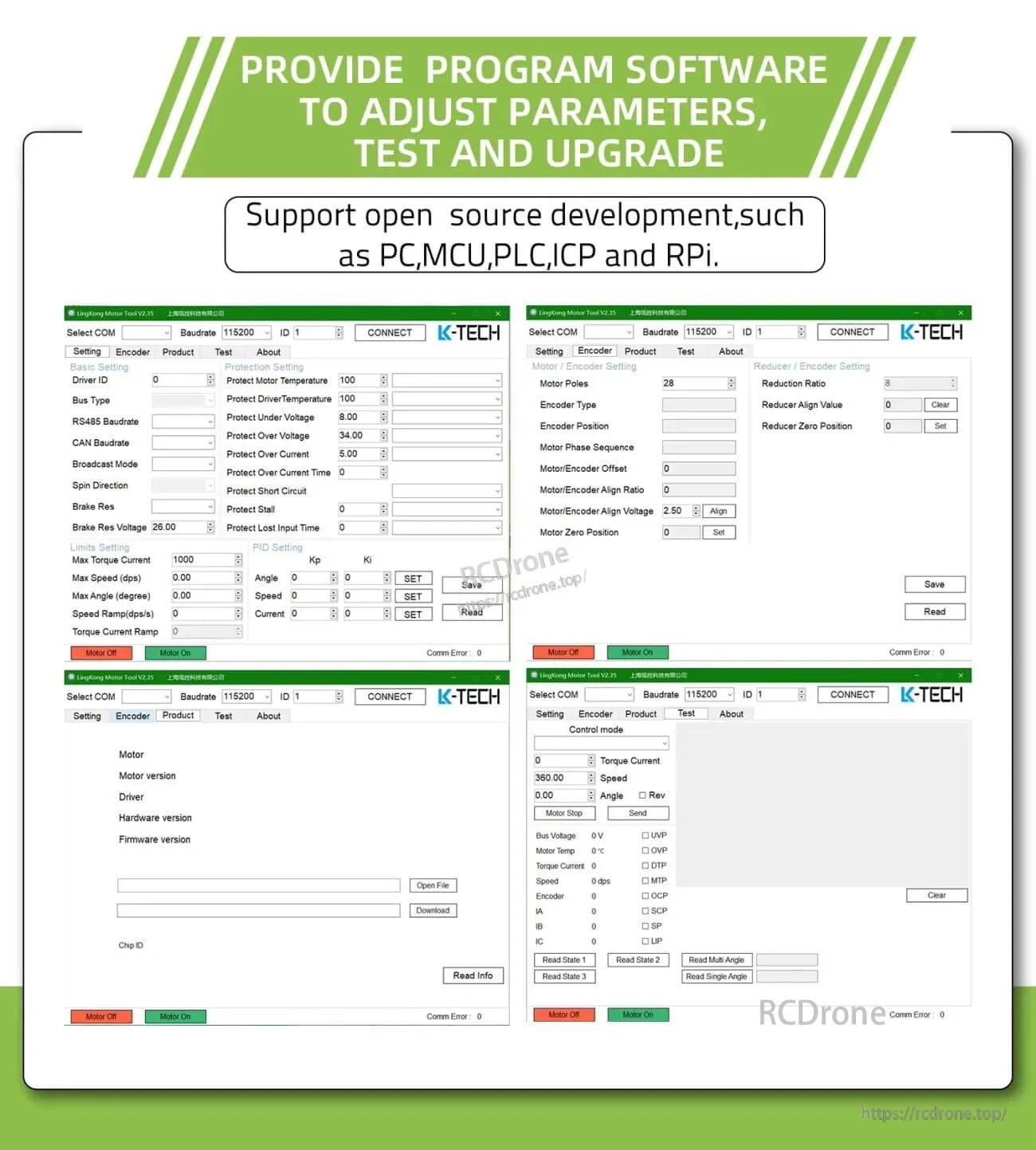
Un logiciel de configuration est fourni pour l'ajustement des paramètres, les tests et les mises à niveau lors de la mise en service et de la maintenance.
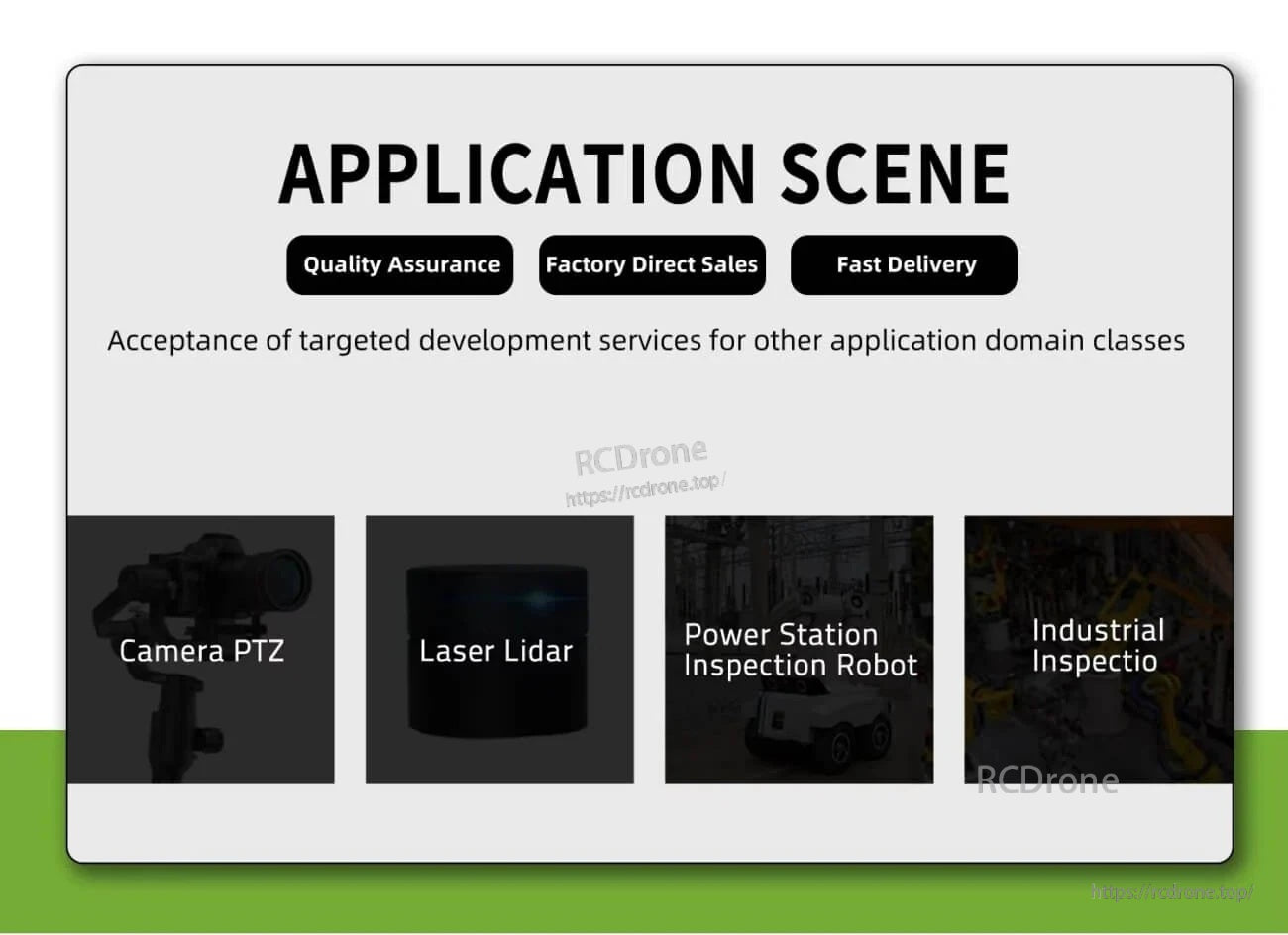
Les cas d'utilisation courants incluent les systèmes PTZ et lidar, ainsi que les robots d'inspection et d'autres projets d'automatisation mobile.
Related Collections



