




Moteur sans balais LKMTECH MG4005-V2 avec réducteur 1:10 PG4210, RS485/CAN, encodeur 18 bits
Moteur sans balais LKMTECH MG4005-V2 avec réducteur 1:10 PG4210, RS485/CAN, encodeur 18 bits
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MG4005-V2 moteur est un module de moteur sans balais conçu pour l'actionnement robotique. Il intègre un réducteur planétaire PG4210 (1:10) et un encodeur magnétique de 18 bits, avec communication via RS485 ou CAN pour le contrôle en boucle fermée du couple/vitesse/position.
Caractéristiques clés
- Moteur sans balais haute puissance
- Réducteur planétaire de haute précision : jeu ≤10 arcmin, rapport 1:10
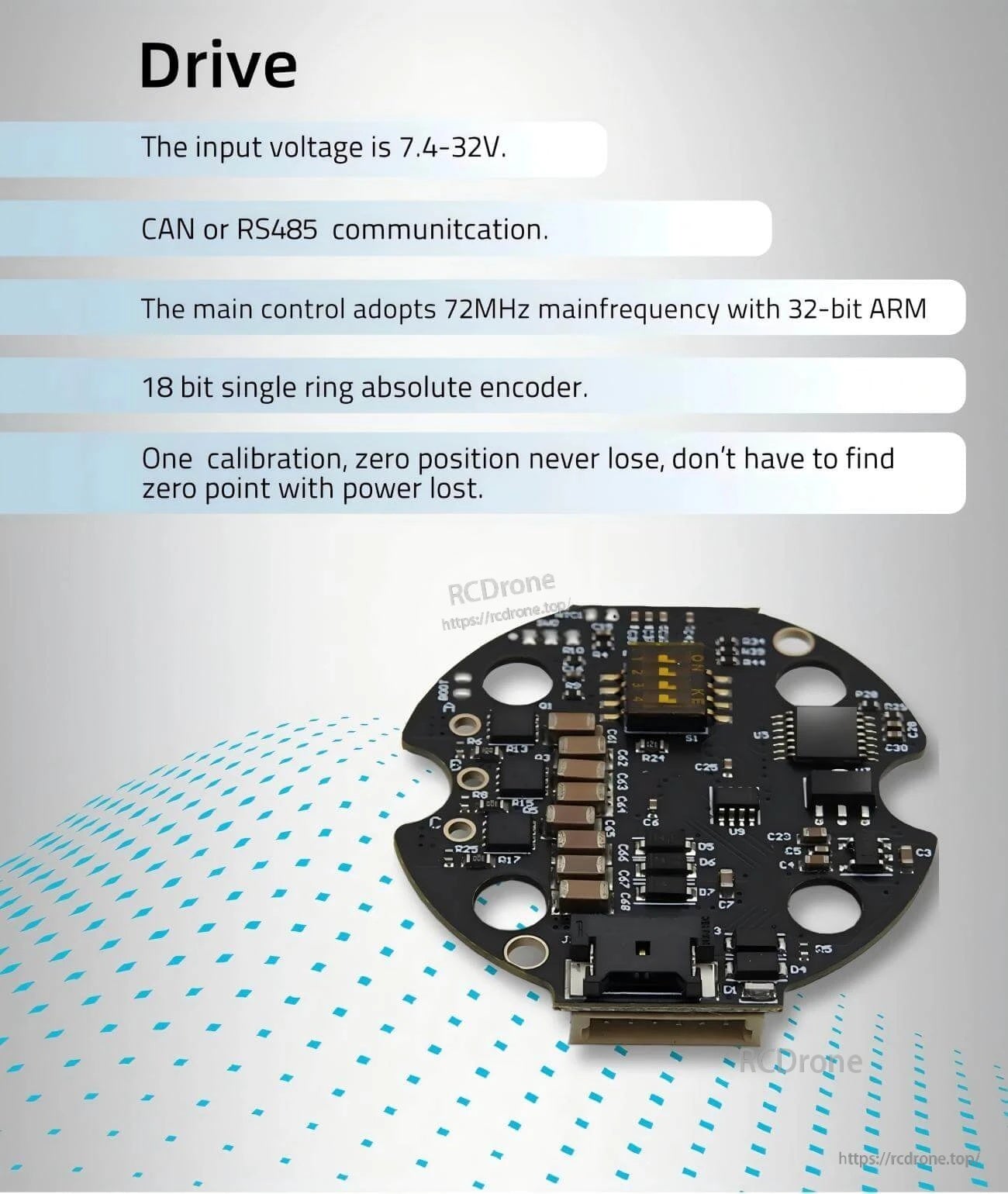
- Encodeur absolu à anneau unique de 18 bits ; une calibration, la position zéro est conservée après une perte de puissance
- Communication : CAN ou RS485
- Tension d'entrée du moteur : 7.4-32V
- Contrôle principal : fréquence principale de 72 MHz avec ARM 32 bits
- Prend en charge l'entrée PWM ; couple de cogging du moteur optimisé pour un fonctionnement plus fluide
- Support logiciel pour outils moteurs : ajustement des paramètres, tests et mise à jour du firmware
- Prend en charge des plateformes de développement open-source telles que PC, MCU, PLC, ICP et RPi
Spécifications
| Nom de l'article | MG4005-V2 |
| Tension nominale | 24V |
| Vitesse maximale | 320RPM |
| Vitesse nominale | 255RPM |
| Couple nominal | 1N.m |
| Couple maximal | 2.5N.m |
| Courant nominal | 1.8A |
| Puissance maximale | 65W |
| Constante de vitesse | 106.3rpm/V |
| Constante de couple | 0.06N.m/A |
| Tours | 28 |
| Type d'enroulement | Y |
| Résistance de phase | 1.4Ω |
| Inductance de phase | 0.5mH |
| Pôles du moteur | 28 |
| Inertie du rotor | 140gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG4210 |
| Rapport de réduction | 1:10 |
| Jeu | ≤10 arcmin |
| Charge nominale des roulements | 1000N |
| Poids du moteur | 154g |
| Recommandation de conduite | DF40 |
| Tension d'entrée du moteur | 7.4-32V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 18 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 1M |
| Mode de contrôle | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Définition de l'interface
| Interface | Remarque |
|---|---|
| A/L | RS485-A ou CAN-L |
| B/H | RS485-B ou CAN-H |
| V- | Alimentation négative |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | Signal GND |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robots portables
- Robots quadrupèdes / chien robot
- Véhicules AGV / voiture AGV
- Robots ARU
Manuels
Pour le câblage, l'intégration et le support après-vente, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected] .
Détails

Conçu pour l'actionnement robotique, le MG4005‑V2 combine un moteur sans balais compact et un réducteur en un module facile à intégrer.
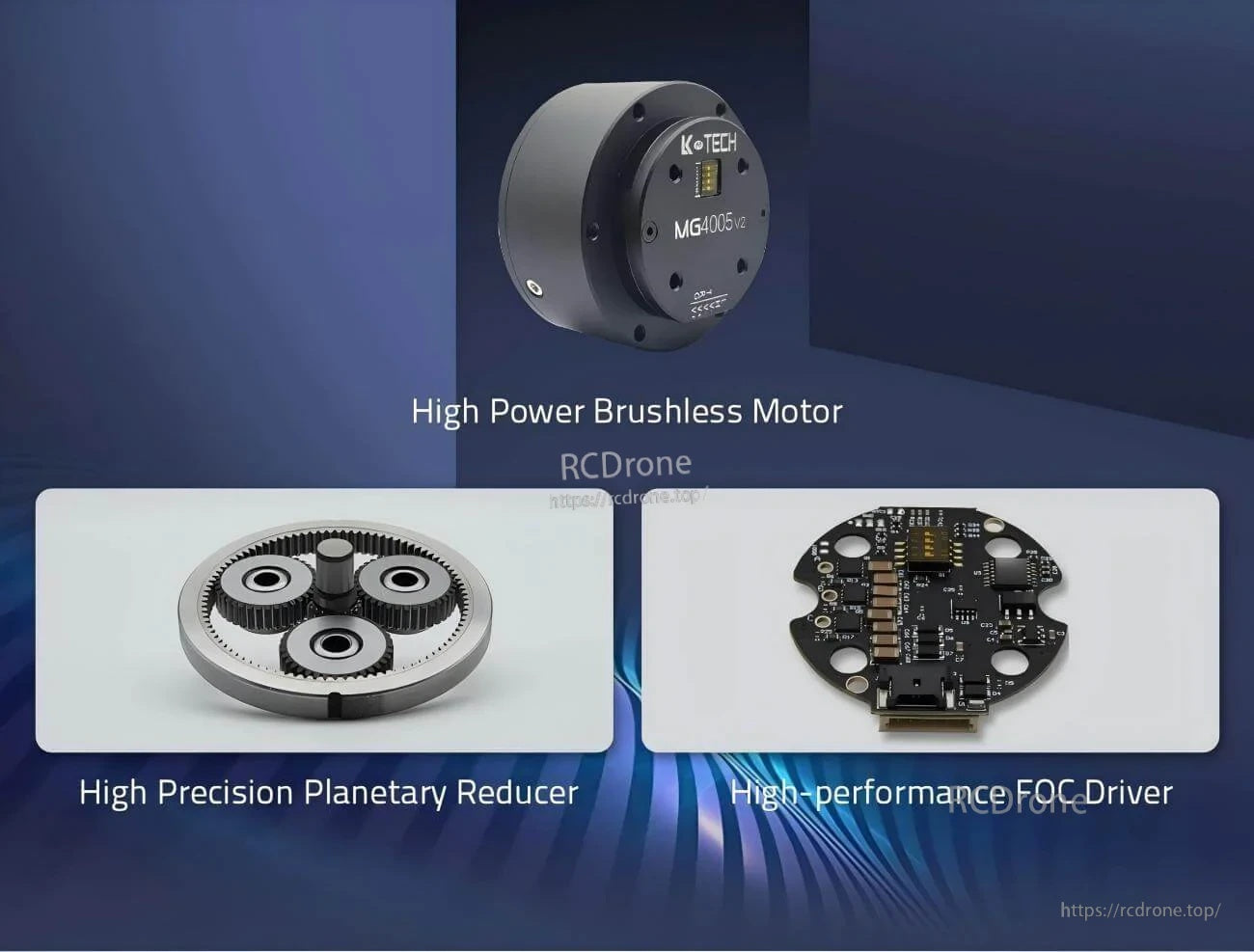
Un moteur apparié, un réducteur planétaire et une carte de commande aident à simplifier le contrôle en boucle fermée du couple, de la vitesse et de la position.
La communication CAN ou RS485 et une large plage d'entrée de 7,4 à 32 V facilitent l'intégration avec les contrôleurs robotiques courants.

La comparaison des versions met en évidence la mise à niveau de l'encodeur MG4005‑V2 à un retour d'information absolu de 18 bits et un support d'entrée PWM.
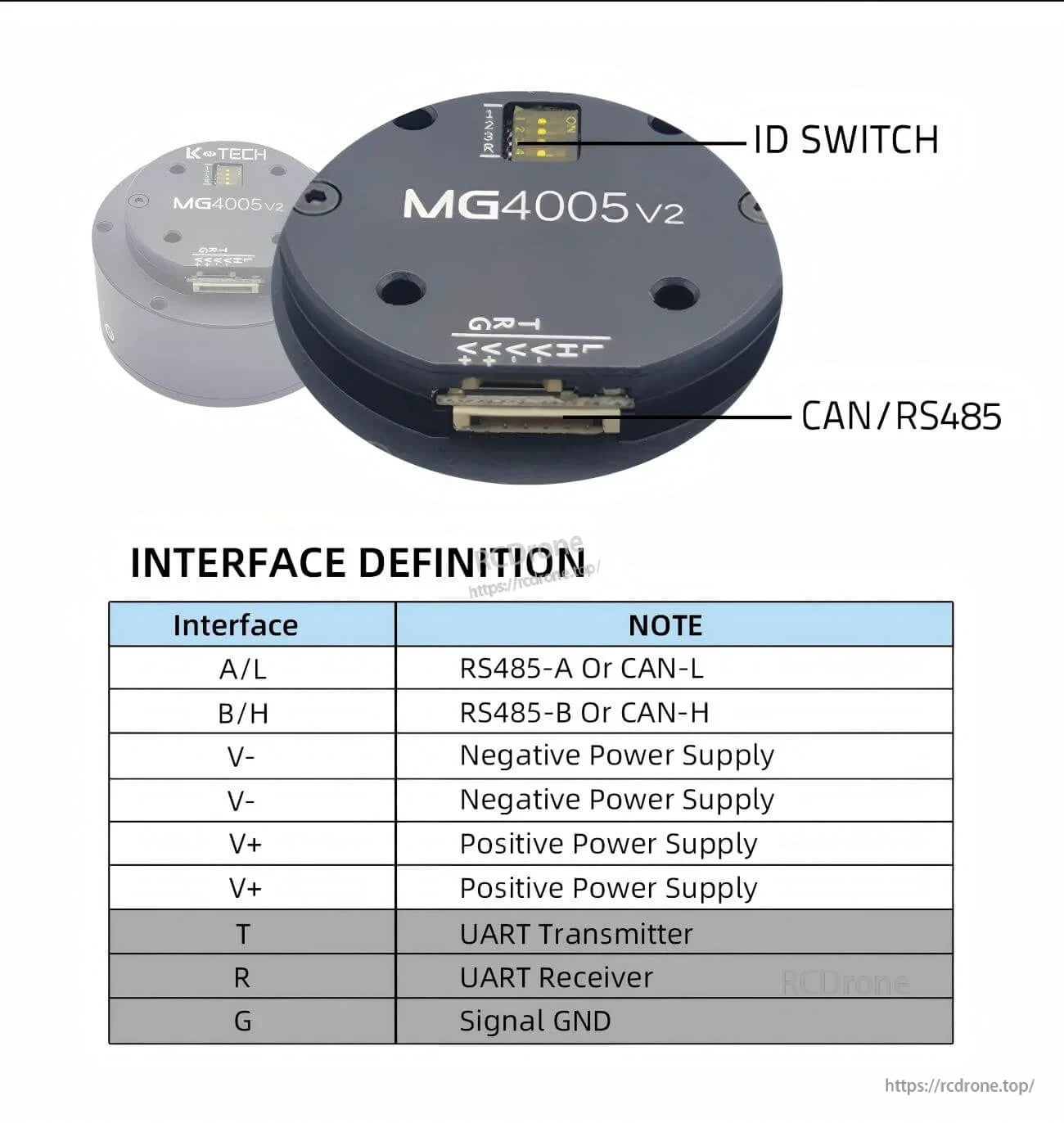
Les définitions de broches et l'interrupteur ID intégré aident à rationaliser le câblage multi-axes et la configuration du bus.

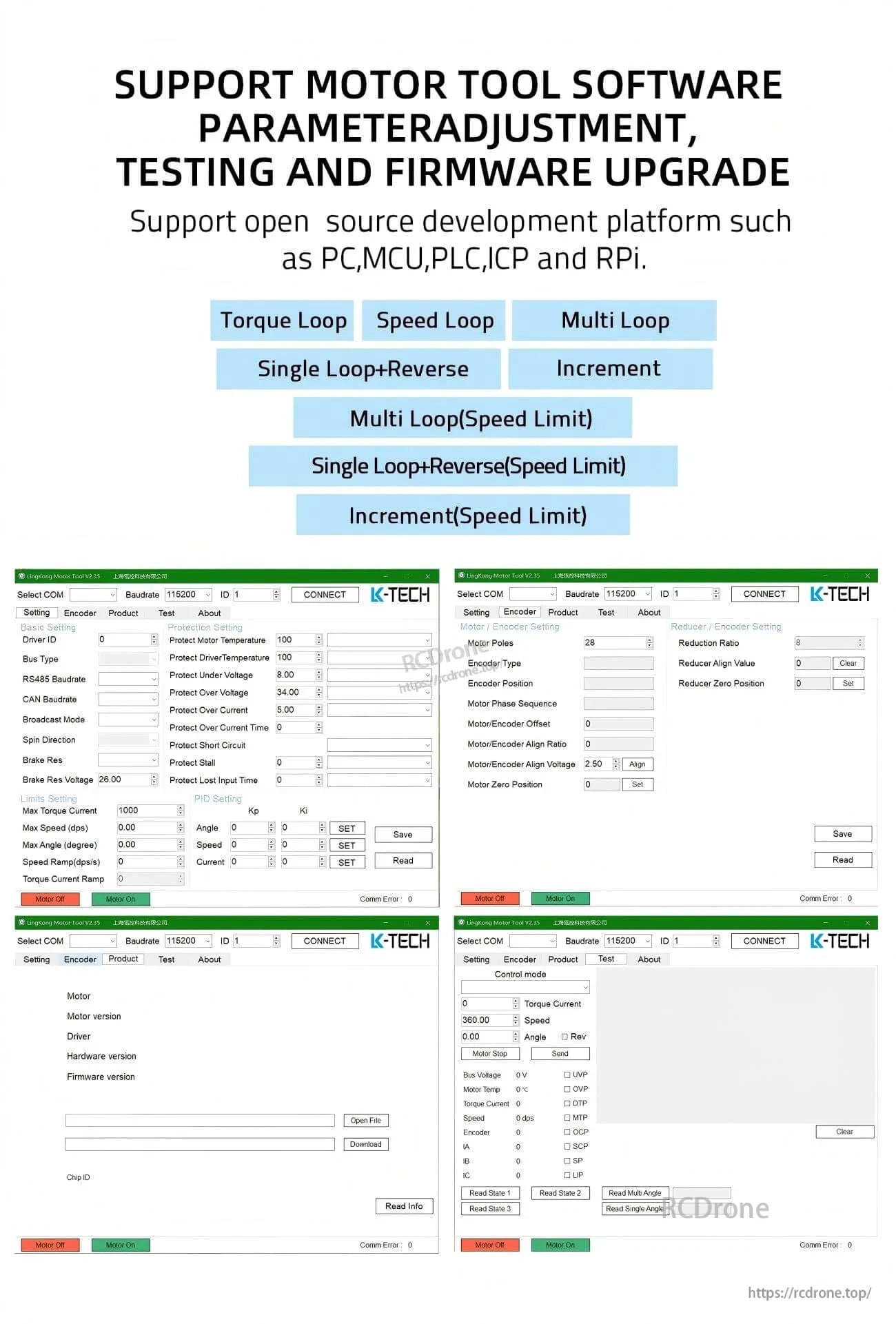
Le logiciel d'outil moteur prend en charge l'ajustement des paramètres, les tests et les mises à jour du firmware pendant la configuration et la maintenance.

Related Collections




