




LKMTECH MG4005E-i10-V3 Moteur à engrenages planétaires, 24V 1:10 PG4210, RS485/CAN Double Encodeur
LKMTECH MG4005E-i10-V3 Moteur à engrenages planétaires, 24V 1:10 PG4210, RS485/CAN Double Encodeur
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MG4005E-i10-V3 Moteur est un moteur à réducteur planétaire conçu pour le mouvement robotique et les articulations d'automatisation nécessitant un réducteur compact, un retour d'information en boucle fermée et une communication en bus. Il intègre un réducteur planétaire (PG4210, 1:10) et des encodeurs magnétiques absolus doubles (côté moteur + côté réducteur) pour un contrôle précis.
Caractéristiques clés
- Moteur à vis planétaire : haute puissance, couple élevé et haute précision
- Moteur sans balais + réducteur à vis planétaire de haute précision
- Contrôle FOC (unité de commande/driver requise)
- Double encodeur : encodeur magnétique absolu à 18 bits à tour unique (côté moteur) + encodeur magnétique absolu à 14 bits à tour unique (côté réducteur)
- L'encodeur côté réducteur prend en charge la sortie de la valeur absolue d'un tour et se souvient du point zéro après la coupure de courant
- Communication RS485 ou bus CAN
- Prend en charge l'ajustement des paramètres via un logiciel PC, des tests et une mise à jour du firmware
- Prend en charge les plateformes de développement open source : PC, MCU, PLC, ordinateur industriel et Raspberry Pi
- Modes de contrôle multiples pris en charge : Mode de couple, Mode de vitesse, Mode de contrôle multi-tours, Mode de position + direction à un tour, Mode de position incrémentale, Mode de contrôle multi-tours (avec limite de vitesse), Mode de position + direction à un tour (avec limite de vitesse), Mode de position incrémentale (avec limite de vitesse)
- Interfaces de capteur de température duales surveillent les températures du moteur et de l'entraînement en temps réel
- Fonction de frein réservée (Frein / Libération de frein)
- Fonctions de protection multiples énumérées : UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Pour le support d'intégration et la confirmation avant-vente, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected].
Spécifications
| Nom de l'article | MG4005E-i10-V3 |
| Tension nominale | 24V |
| Vitesse max | 320RPM |
| Couple nominal | 1 N.m |
| Vitesse nominale | 255RPM |
| Courant nominal | 1.8A |
| Puissance max | 65W |
| Couple max | 2.5 N.m |
| Constante de vitesse | 106.3rpm/V |
| Constante de couple | 0.06 N.m/A |
| Tours | 28 |
| Type d'enroulement | Y |
| Résistance de phase | 1.4Ω |
| Inductance de phase | 0.5mH |
| Poles du moteur | 28 |
| Inertie du rotor | 140gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG4210 |
| Rapport de réduction | 1:10 |
| Jeu | ≤10 arcmin |
| Charge nominale du roulement | 1000N |
| Poids du moteur | 183g |
| Conduite recommandée | DG40E |
| Tension d'entrée de la conduite | 7.4-32V |
| Communication | RS485 ou CAN |
| Fréquence de communication | RS485 : 500Hz (115200bps) / CAN : 2KHz (1Mbps) |
| Encodeur | Encodeur magnétique 18 bits (moteur) + 14 bits (réducteur) |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24KHz) / Boucle de vitesse (8KHz) / Boucle de position (4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Définition de l'interface
| Interface | Remarque |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robots portables
- Robots quadrupèdes / chien robot
- Véhicules AGV / voiture AGV
- Robots ARU
Manuels / Fichiers
Détails

MG4005E-i10-V3 combine un moteur sans balais avec un réducteur planétaire dans un format compact pour les articulations robotiques et les axes d'automatisation.

Les encodeurs magnétiques absolus à double tour simple fournissent un retour d'information côté moteur et côté sortie, avec un interrupteur ID dédié pour les configurations de bus.
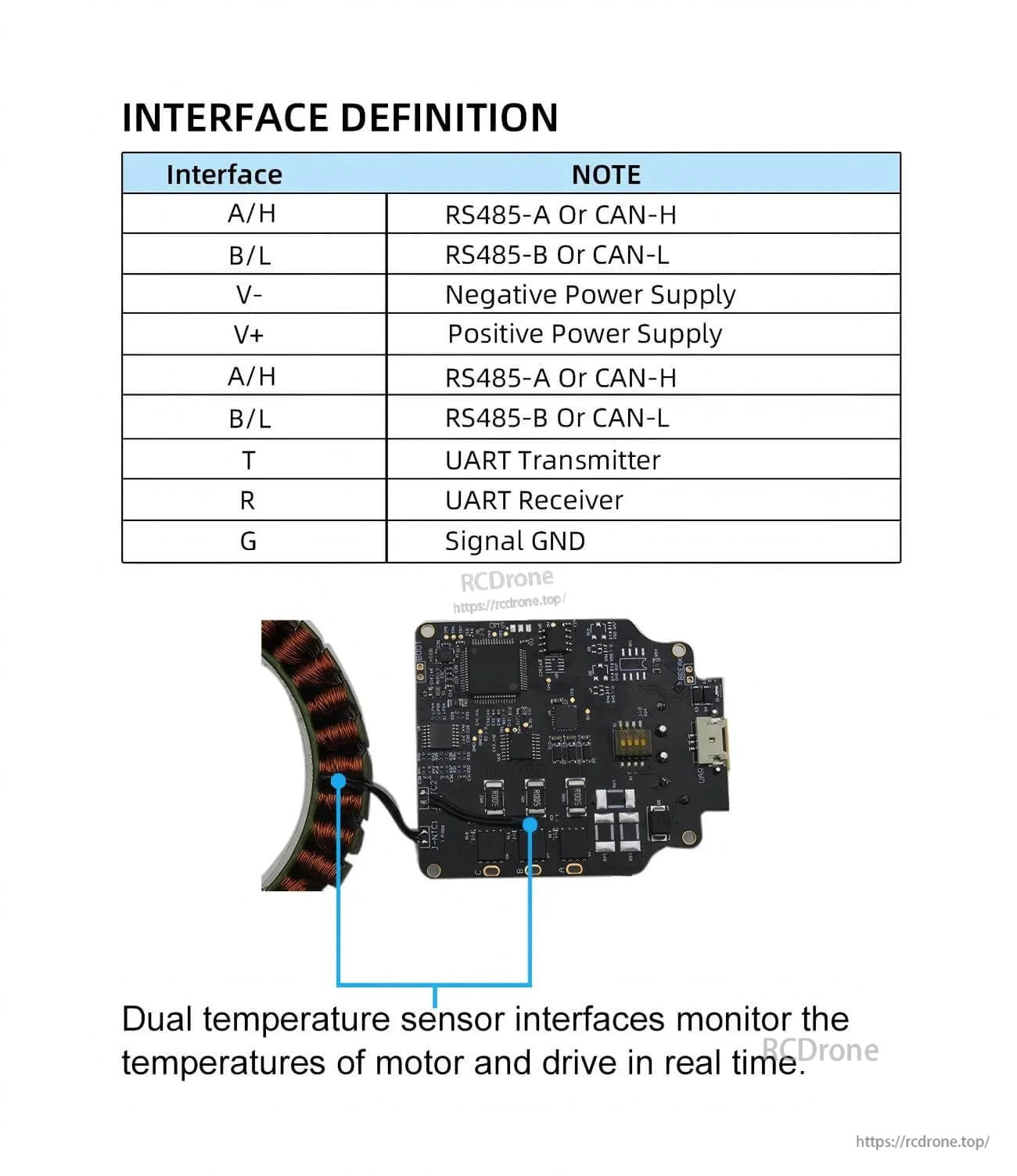
Le câblage est simplifié avec des bornes clairement définies pour l'alimentation, la communication RS485/CAN et les connexions de signal UART.
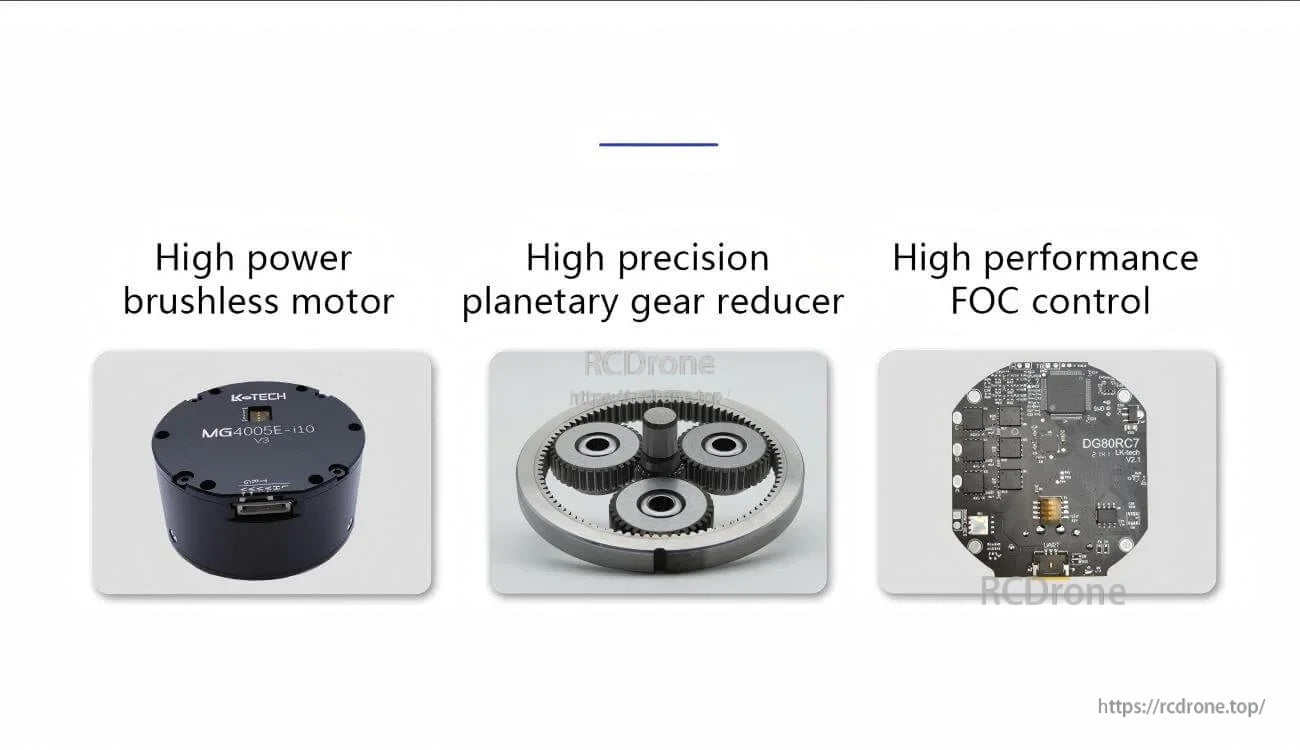
Un moteur sans balais, un réducteur planétaire de précision et un contrôle FOC soutiennent une livraison de couple fluide et un contrôle de mouvement précis.

Le drive prend en charge la communication RS485 ou CAN et une large plage de tension d'entrée (7,4–32V) pour une intégration flexible.
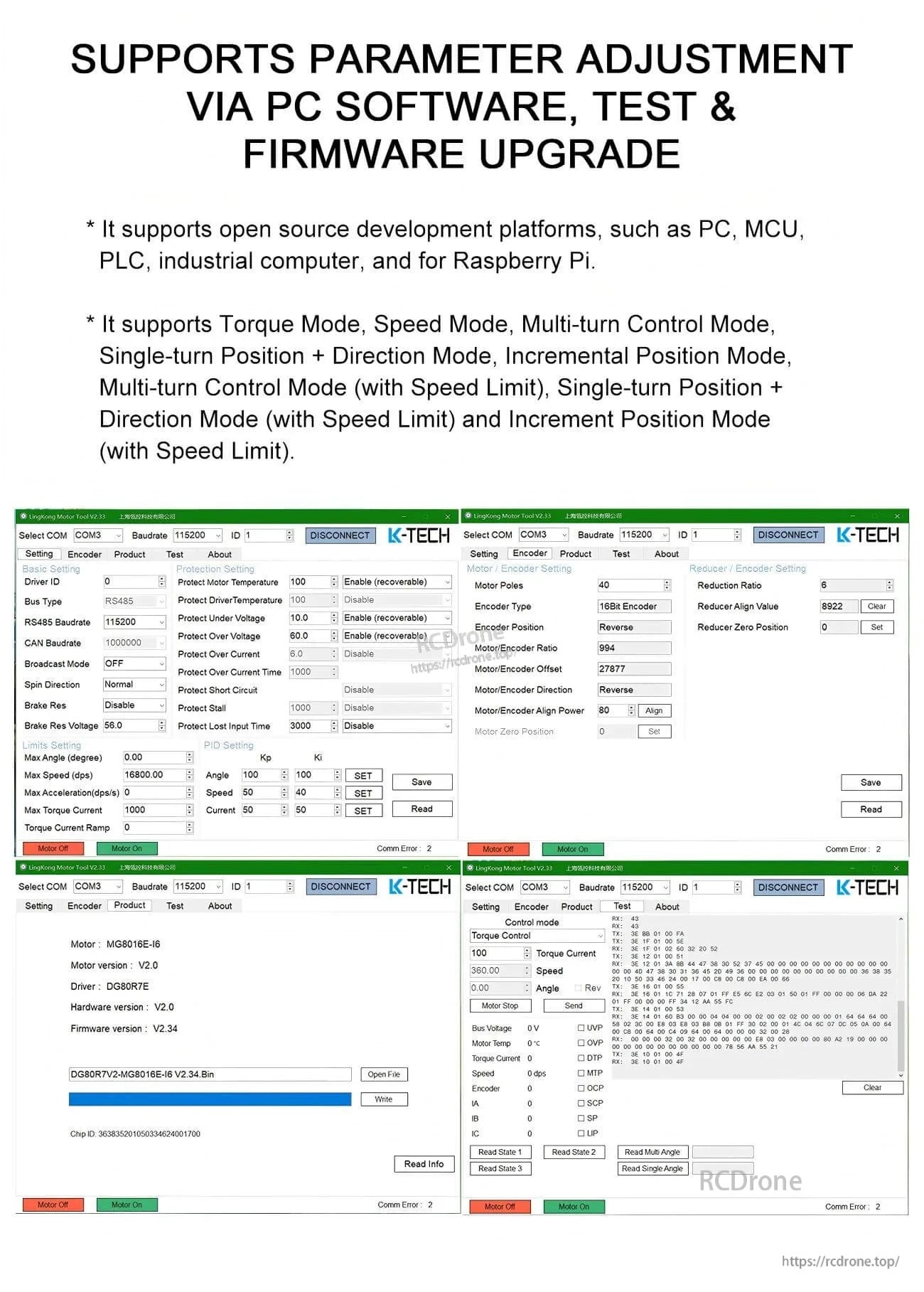
Le logiciel PC permet le réglage des paramètres, les tests fonctionnels et les mises à jour du firmware lors de la mise en service et de la maintenance.
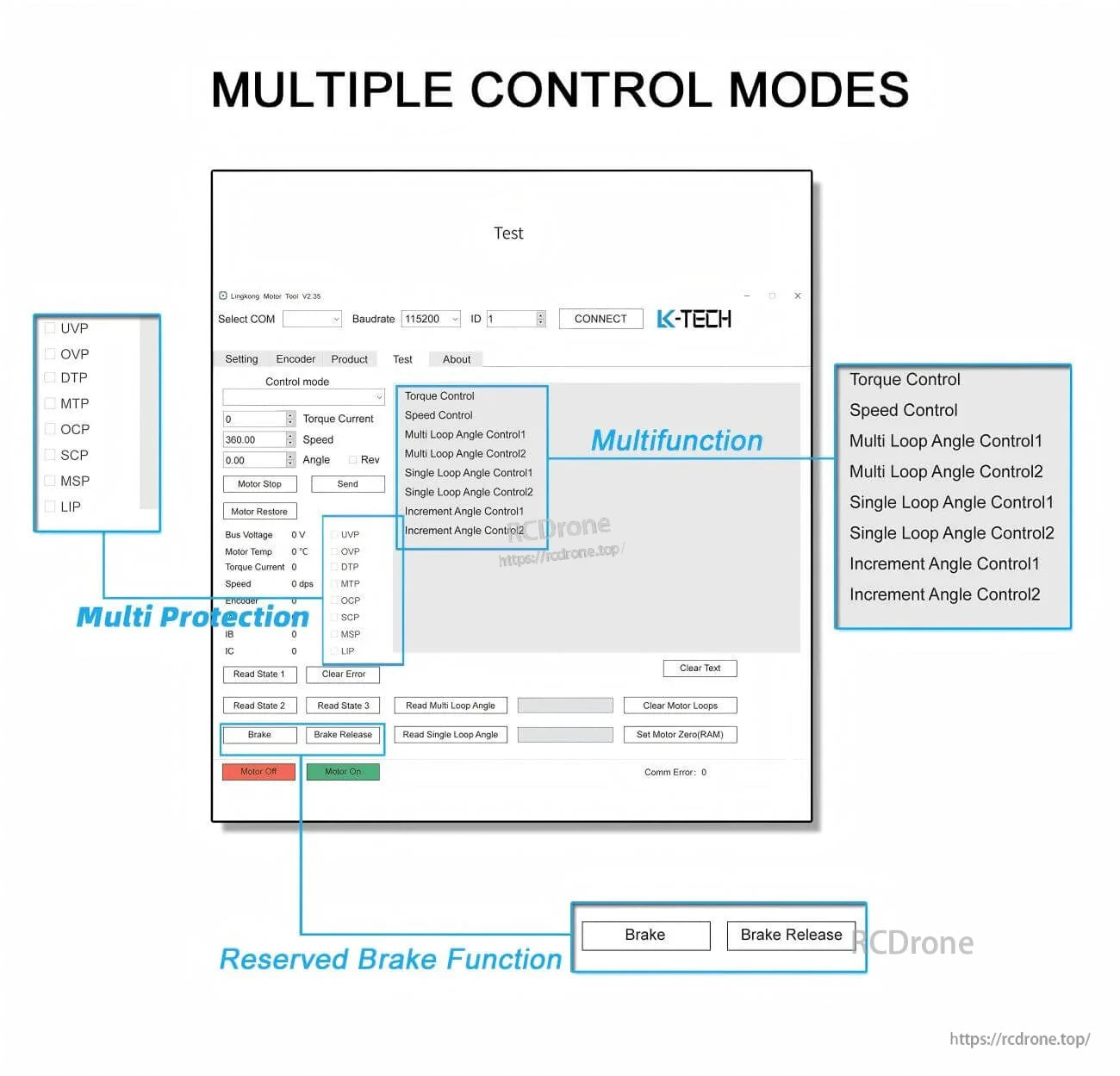
Choisissez parmi plusieurs modes de contrôle tels que le contrôle de couple, de vitesse et de position, avec surveillance intégrée de l'état de protection.
Conçu pour une action compacte dans les robots mobiles, les bras articulés, les quadrupèdes et la robotique portable.
Related Collections




