




LKMTECH MG4010E-i10B-V3 Moteur à engrenages planétaires avec frein, 24V 320RPM, RS485/CAN, Encodeur 18 bits
LKMTECH MG4010E-i10B-V3 Moteur à engrenages planétaires avec frein, 24V 320RPM, RS485/CAN, Encodeur 18 bits
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
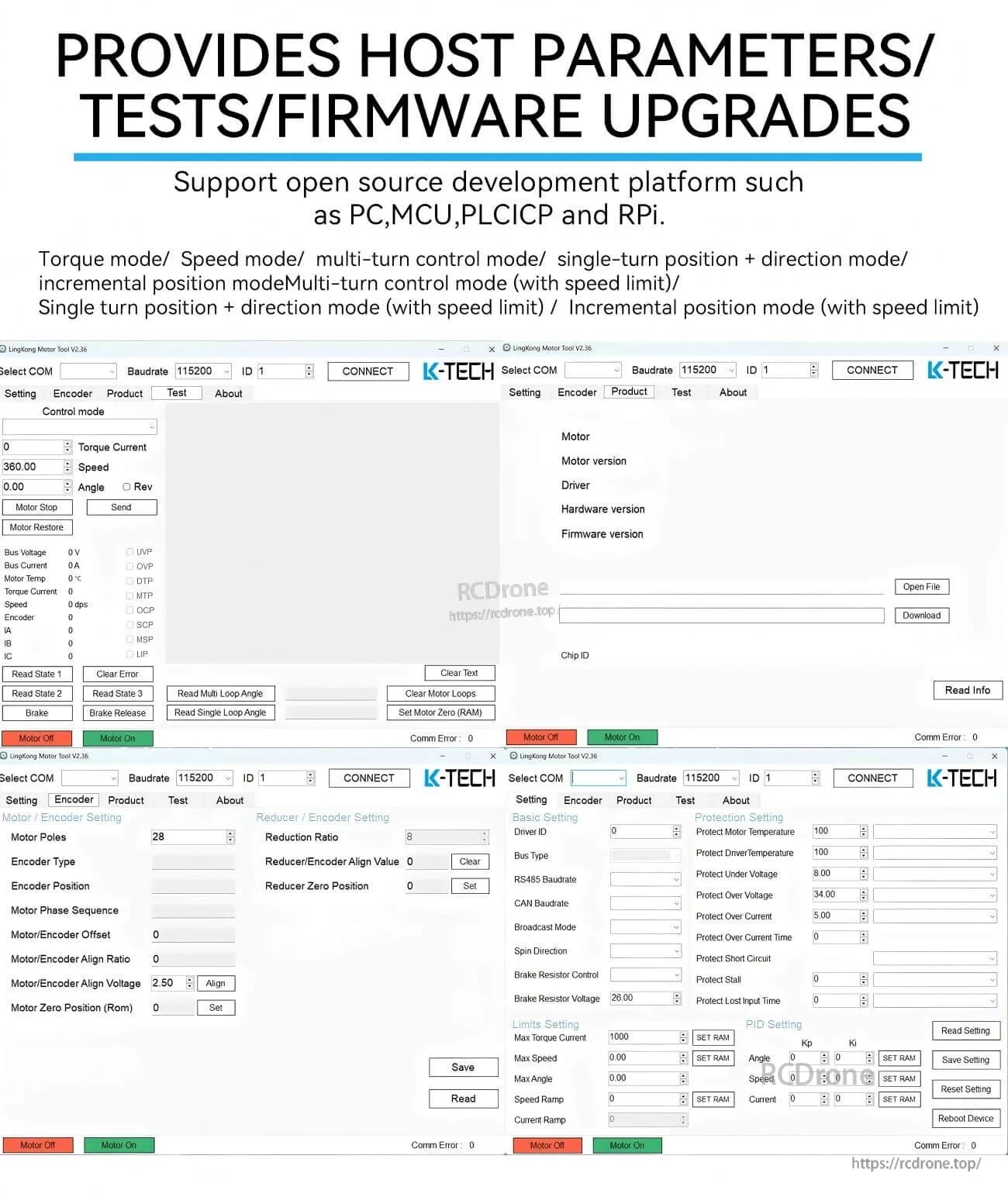
LKMTECH MG4010E-i10B-V3 moteur est un moteur à réduction planétaire avec frein, conçu pour les actionneurs de robotique et d'automatisation qui nécessitent une taille compacte, un couple de réduction et une communication de bus de terrain (RS485 ou CAN). Il utilise un encodeur magnétique de 18 bits et prend en charge les boucles de contrôle de couple, de vitesse et de position.
Caractéristiques clés
- Moteur à réduction planétaire à deux étages avec freins (série MG4010E-i10B)
- Rapport de réduction : 1:10 ; Jeu de pignon : 8 arcmin (également spécifié comme ≤8 arcmin)
- Encodeur magnétique absolu à tour unique de 18 bits (encodeur magnétique de 18 bits)
- Communication : RS485 ou CAN
- Modes/boucles de contrôle : Boucle de couple (32KHz) / Boucle de vitesse (8KHz) / Boucle de position (4KHz)
- Courbe d'accélération : Accélération trapézoïdale
- Frein intégré ; Type de frein BG4906 ; Couple de frein 3.2 N.m
- Fonctionnalités de l'interface : commutateur d'ID
- Texte lié à l'entraînement affiché : Frein intégré ; communication RS485 ou CAN bus ; Double encodeurs, se souvenir du point zéro après coupure de courant ; Tension d'entrée 12-60V
Spécifications
| Nom de l'article | MG4010E-i10B-V3 |
| Tension nominale | 24V |
| Vitesse maximale | 320RPM |
| Vitesse nominale | 260RPM |
| Couple nominal | 2.5N.m |
| Couple maximal | 4.5N.m |
| Courant nominal | 3.5A |
| Puissance maximale | 140W |
| Constante de vitesse | 108.3rpm/V |
| Constante de couple | 0.07N.m/A |
| Transformations | 14 |
| Type d'enroulement | Y |
| Résistance de phase | 0.604Ω |
| Inductance de phase | 0.28mH |
| Pôles du moteur | 28 |
| Inertie du rotor | 202gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG4210 |
| Rapport de réduction | 1:10 |
| Jeu | ≤8 arcmin |
| Charge nominale du roulement | 1000N |
| Poids du moteur | 392g |
| Type de frein | BG4906 |
| Couple de frein (N.m) | 3.2N.m |
| Tension de démarrage (V) | 24V |
| Tension de maintien (V) | 7V |
| Puissance de maintien (W) | 1.4W |
| Recommandation de moteur | DG40 |
| Tension d'entrée du moteur | 7.4-32V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 18 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (32KHz)/Boucle de vitesse (8KHz)/Boucle de position (4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
| Taille du moteur | Φ 59*37 |
| Jeu de jeu de l'engrenage | 8 arcmin |
Définition de l'interface
- Interrupteur ID
| Port | Instructions |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND Signal |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robot exosquelette
- Robots quadrupèdes / Chien Mecha
- Véhicules AGV / voiture AGV
- Robots ARU
- Robot de service
- Lidar portable
- Robot d'entraînement à la réhabilitation
- Robot d'inspection
Manuels
Pour le support d'intégration et les questions avant-vente, contactez [email protected] or visitez https://rcdrone.top/.
Détails

Un moteur planétaire compact MG4010E-i10B-V3 avec frein intégré, réduction 1:10 et un jeu de ≤8 arcmin pour des articulations robotiques précises.
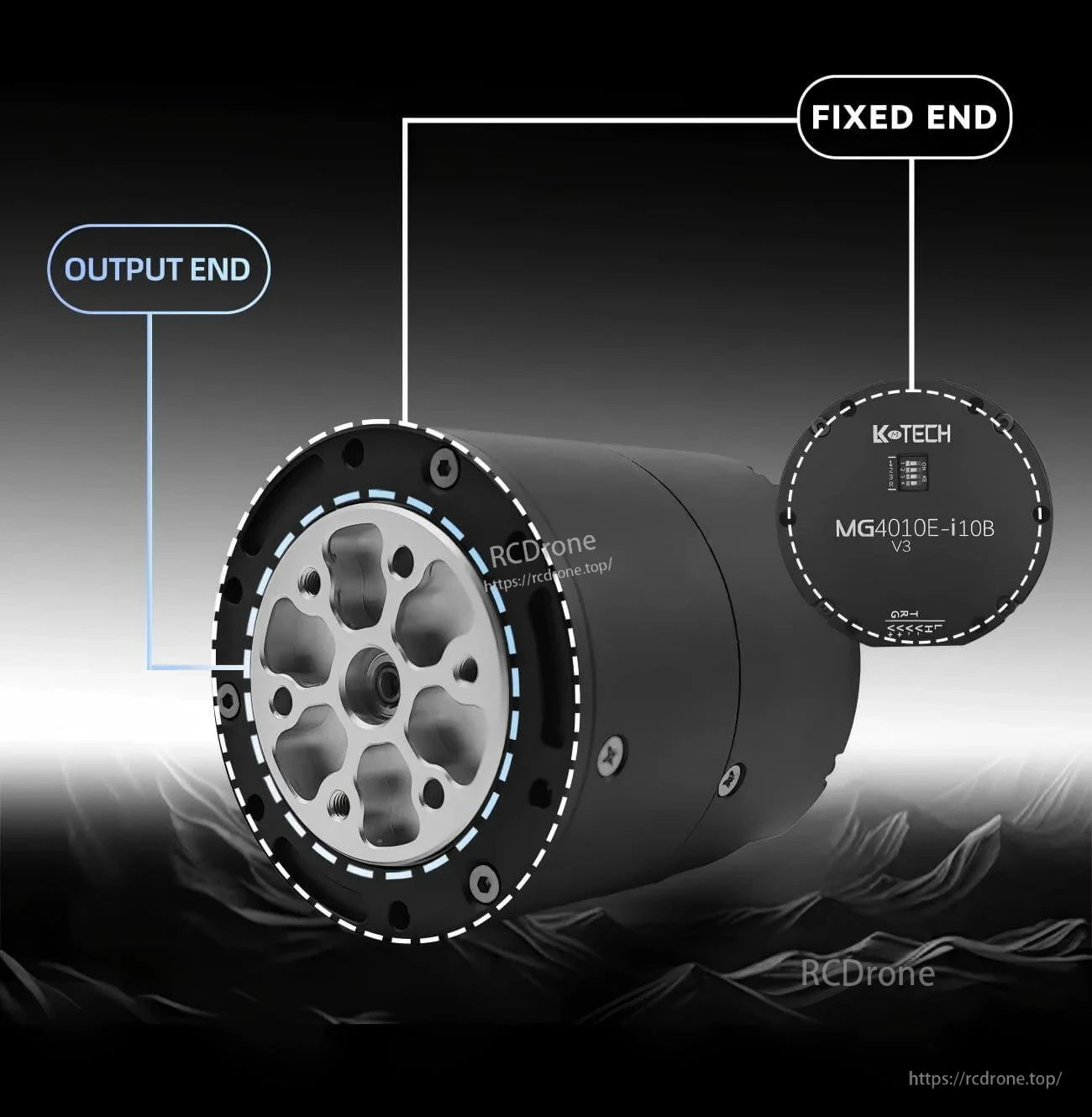
Une identification claire de l'extrémité de sortie par rapport à l'extrémité fixe aide à simplifier la disposition mécanique et l'orientation du câblage lors de l'intégration.

Un encodeur magnétique absolu à tour unique de 18 bits et un support RS485/CAN bus pour le contrôle du couple, de la vitesse et de la position pour les actionneurs d'automatisation.
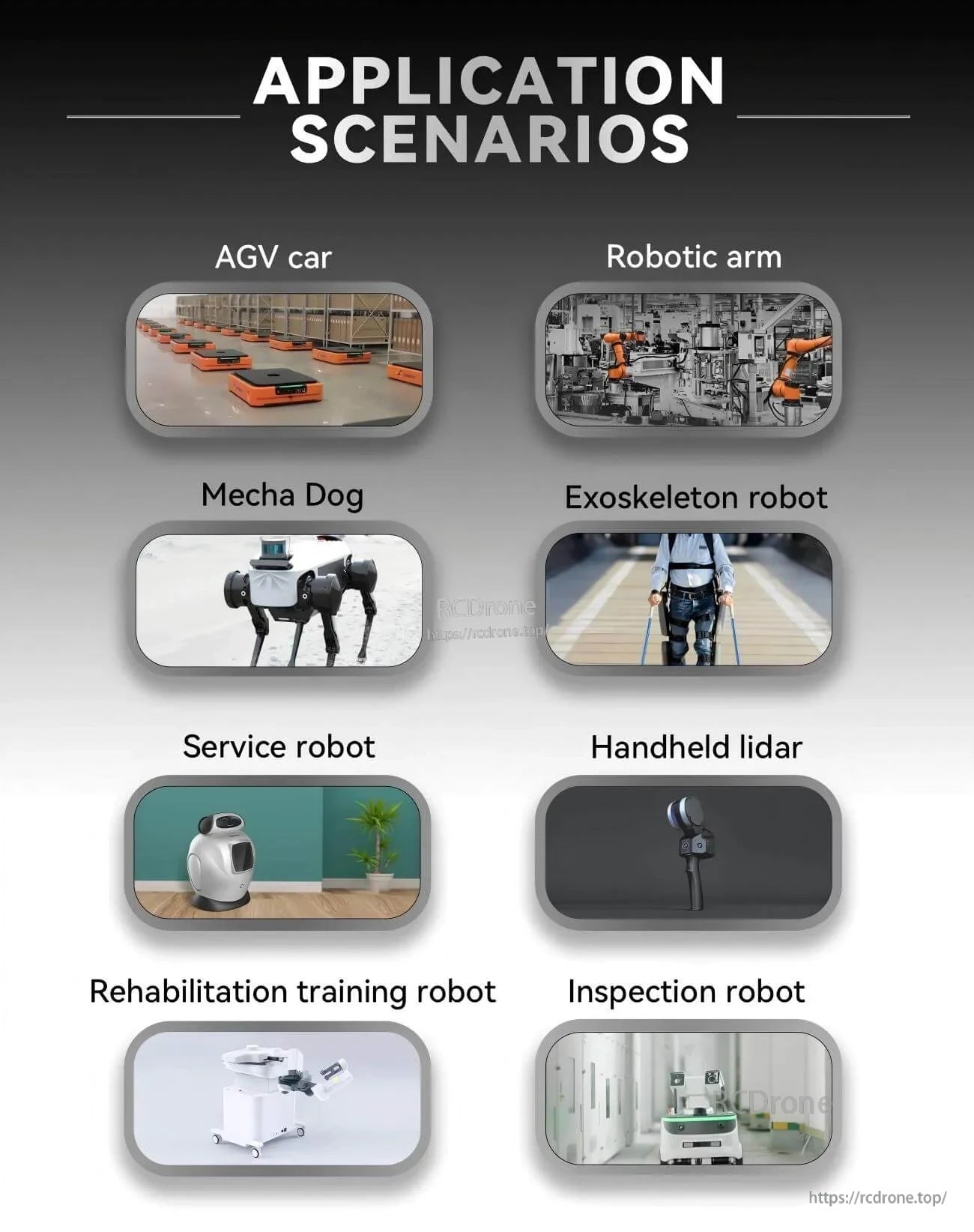
Conçu pour des cas d'utilisation en robotique et en automatisation, y compris les AGV, les bras robotiques, les robots quadrupèdes, les exosquelettes et les plateformes d'inspection.
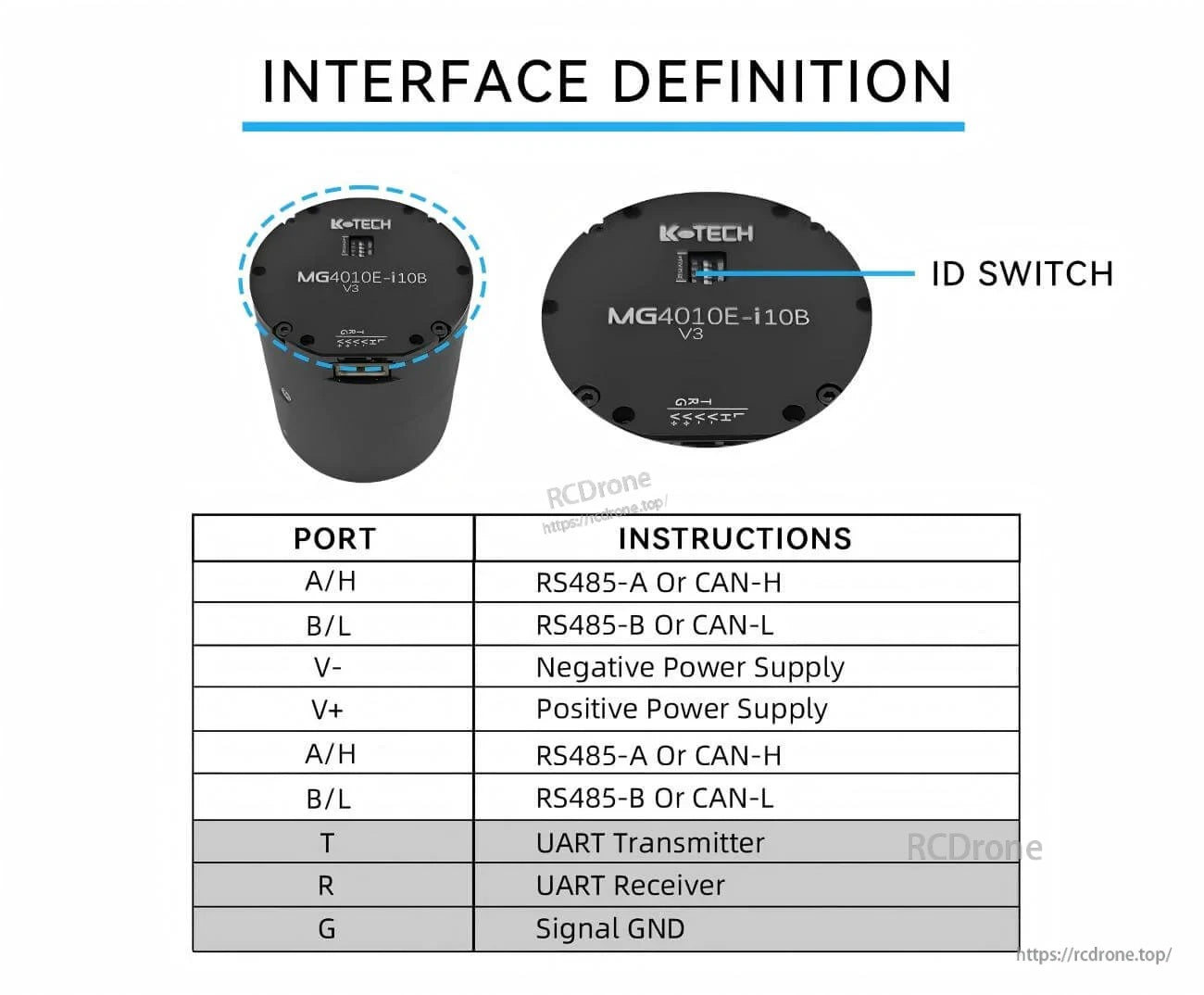
Le mappage des ports inclut RS485-A/CAN-H et RS485-B/CAN-L, plus l'alimentation, UART TX/RX, la masse de signal et un interrupteur d'identification intégré.

Related Collections




