




Moteur à engrenages planétaires LKMTECH MG4010E-i36-V3 24V 1:36 RS485/CAN Encodeur magnétique pour robotique
Moteur à engrenages planétaires LKMTECH MG4010E-i36-V3 24V 1:36 RS485/CAN Encodeur magnétique pour robotique
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MG4010E-i36-V3 moteur est un moteur à réduction planétaire conçu pour la robotique et les actionneurs de contrôle de mouvement. Il combine un moteur sans balais, un réducteur planétaire et un encodeur magnétique, avec des options de communication répertoriées comme RS485 ou CAN.
Caractéristiques clés
- Moteur à réduction planétaire (MG4010E-i36, V3).
- Rapport de réduction : 1:36 (également indiqué comme “Rapport de réduction 1:36”).
- Jeu de l'engrenage : 7 arcmin (étiquette d'image) / 12 arcmin (tableau des spécifications).
- Encodeur : encodeur magnétique absolu à 18 bits à tour unique (texte d'image) ; également répertorié comme encodeur magnétique à 18 bits (moteur) + 14 bits (réducteur) (tableau des spécifications).
- Communication : RS485 ou CAN.
- Driver/FOC référencé (texte d'image : “Driver FOC haute performance”).
- Frein intégré (texte d'image/étiquette UI).
- Paramètres hôtes/tests/mises à jour du firmware pris en charge (texte d'image).
Spécifications
| Nom de l'article | MG4010E-i36-V3 |
| Tension nominale | 24V |
| Vitesse maximale | 90RPM |
| Vitesse nominale | 77RPM |
| Courant nominal | 2.4A |
| Puissance maximale | 132W |
| Couple nominal | 6 N.m (tableau des spécifications) / 9 N.m (étiquette d'image) |
| Couple maximal | 13 N.m (tableau des spécifications) / 18 N.m (étiquette d'image) |
| Constante de vitesse | 3 rpm/V |
| Constante de couple | 2.58 N.m/A |
| Tours | 14 |
| Type d'enroulement | Y |
| Résistance de phase | 0.68 Ω |
| Inductance de phase | 0.25 mH |
| Poles du moteur | 28 |
| Inertie du rotor | 158 gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG5336 |
| Rapport de réduction | 1:36 |
| Jeu | ≤12 arcmin (tableau des spécifications) / 6 arcmin (étiquette image) |
| Charge nominale du roulement | 1120 N |
| Poids du moteur | 378 g |
| Recommandation de conduite | DG40E |
| Tension d'entrée du moteur | 12-24V (tableau des spécifications) / 12-60V (étiquette image) |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485 : 500 Hz (115200 bps) / CAN : 2 KHz (1 Mbps) |
| Encodeur | 18bit (moteur) + 14bit (réducteur) Encodeur Magnétique |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mode de Contrôle | Boucle de couple (24 KHz) / Boucle de vitesse (8 KHz) / Boucle de position (4 KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
| Taille du moteur | Φ 53*54.5 (étiquette d'image) |
Définition de l'interface
- Interrupteur ID (étiquette d'image : “ID SWITCH”).
| Port | Instructions |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation Négative |
| V+ | Alimentation Positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND Signal |
Scénarios d'Application
- Robots Humanoïdes
- Bras Robotiques
- Exosquelettes
- Robots Quadrupèdes
- Véhicules AGV / voiture AGV
- Robots ARU
- Chien Mécanique
- Robot de service
- Lidar portable
- Robot de formation à la réhabilitation
- Robot d'inspection
Contrôle & Notes sur le logiciel
- Prend en charge des plateformes de développement open source telles que PC, MCU, PLC, ICP et RPi.
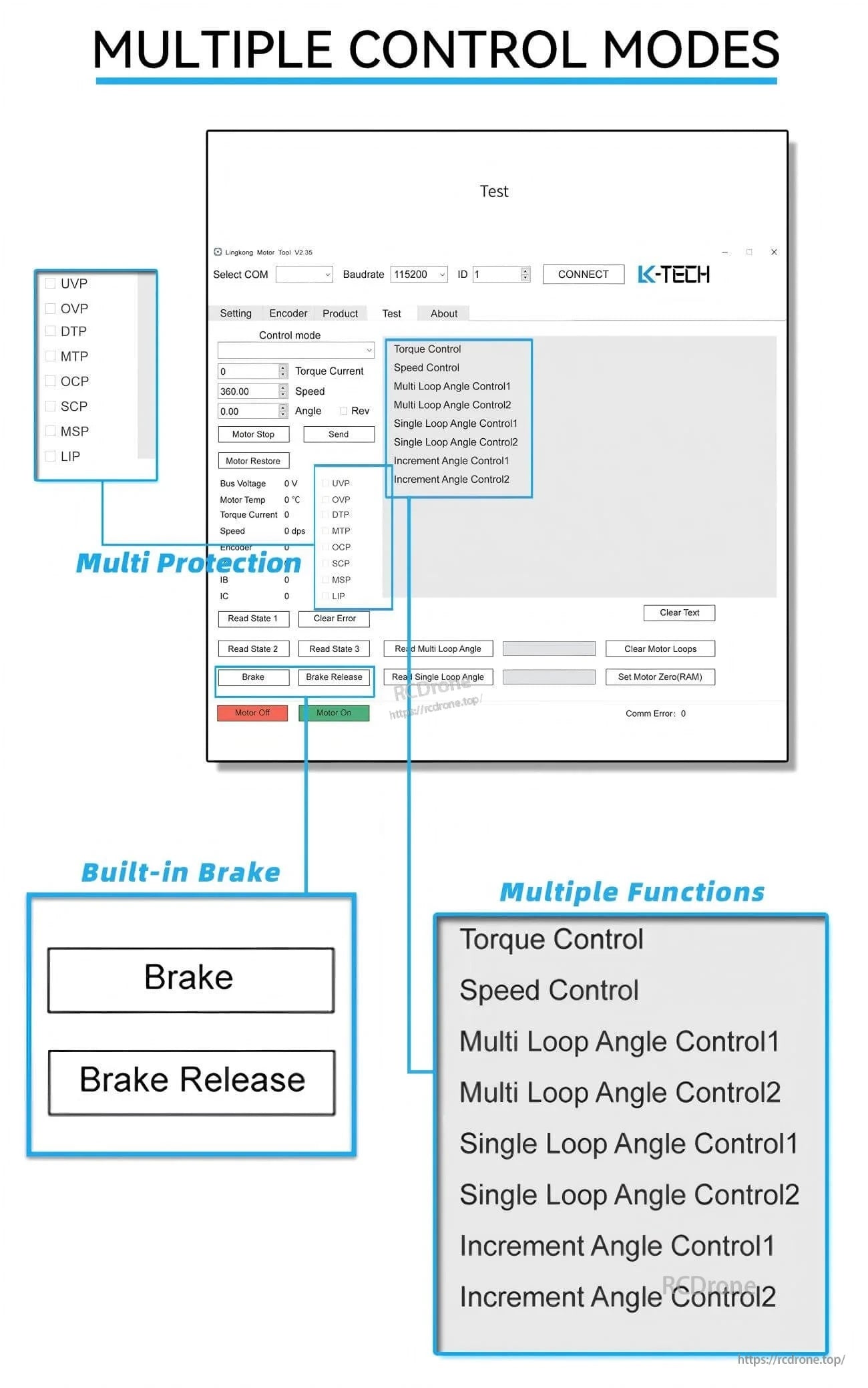
- Modes répertoriés (texte de l'image) : Mode couple, Mode vitesse, Mode de contrôle multi-tours, Mode de position + direction à un tour, Mode de position incrémentale ; des versions avec limite de vitesse sont également affichées.
- Modes de contrôle multiples affichés dans l'interface utilisateur : Contrôle de couple, Contrôle de vitesse, Contrôle d'angle multi-boucle1, Contrôle d'angle multi-boucle2, Contrôle d'angle à boucle unique1, Contrôle d'angle à boucle unique2, Contrôle d'angle incrémental1, Contrôle d'angle incrémental2.
- Étiquettes de protection multiples affichées : UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Contrôles de frein intégrés affichés : Frein, Libération de frein.
Pour des vérifications de compatibilité avant-vente (intégration RS485/CAN, sélection de débit en bauds) ou de l'aide pour l'accès aux fichiers, contactez [email protected] or visitez https://rcdrone.top/.
Manuels / Documents
Détails

Le MG4010E-i36-V3 combine un moteur sans balais, un réducteur planétaire et un encodeur magnétique pour des actionneurs robotiques compacts.
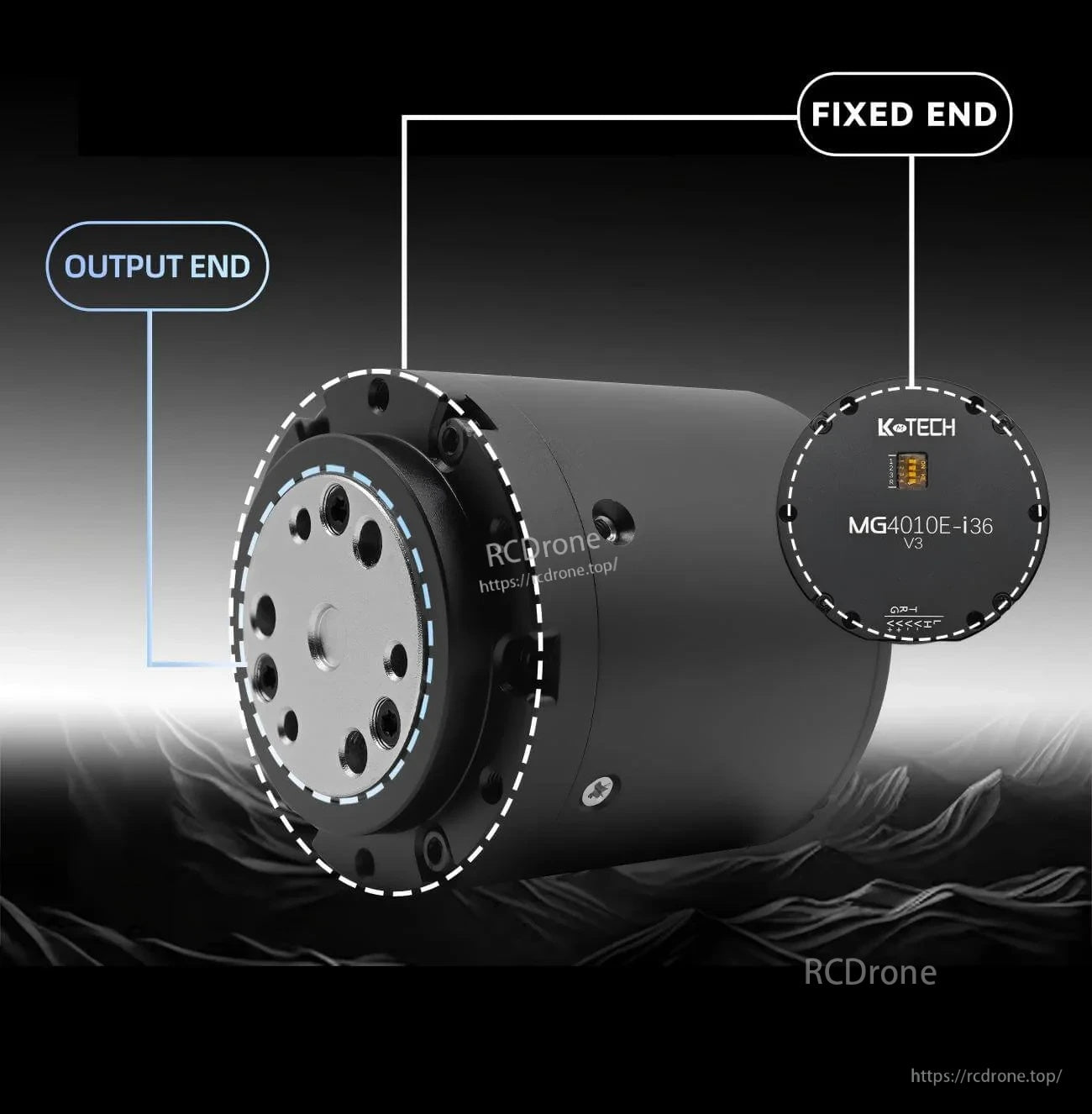
Un embout de sortie de type bride et une disposition d'extrémité fixe facilitent l'intégration dans les bras, les jambes et d'autres modules articulés.

La communication RS485 ou CAN s'associe à un driver FOC et à un retour d'encodeur magnétique absolu pour un contrôle stable du couple, de la vitesse et de la position.
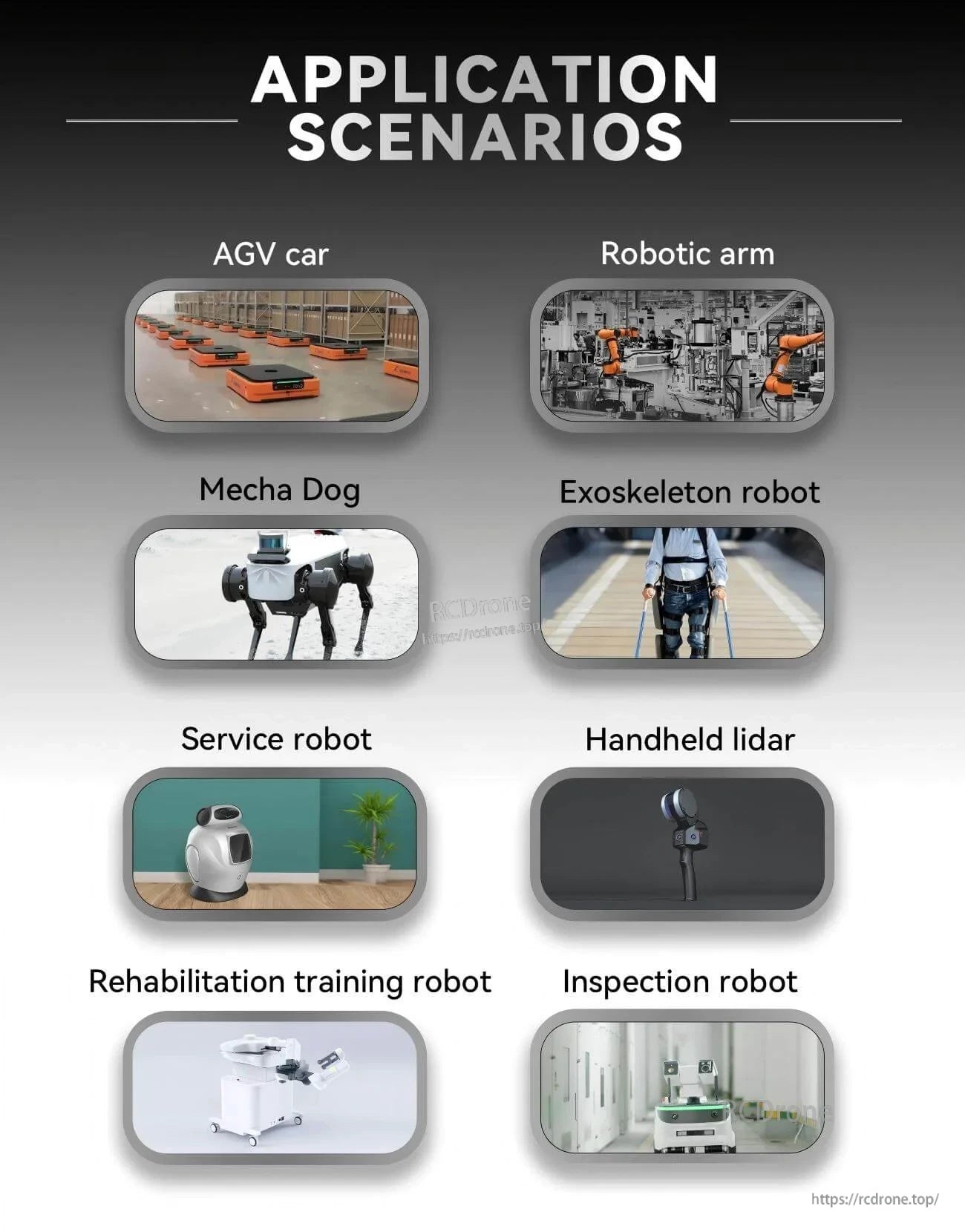
Les cas d'utilisation courants incluent les AGV, les bras robotiques, les plateformes quadrupèdes, les exosquelettes et les robots d'inspection ou de service.
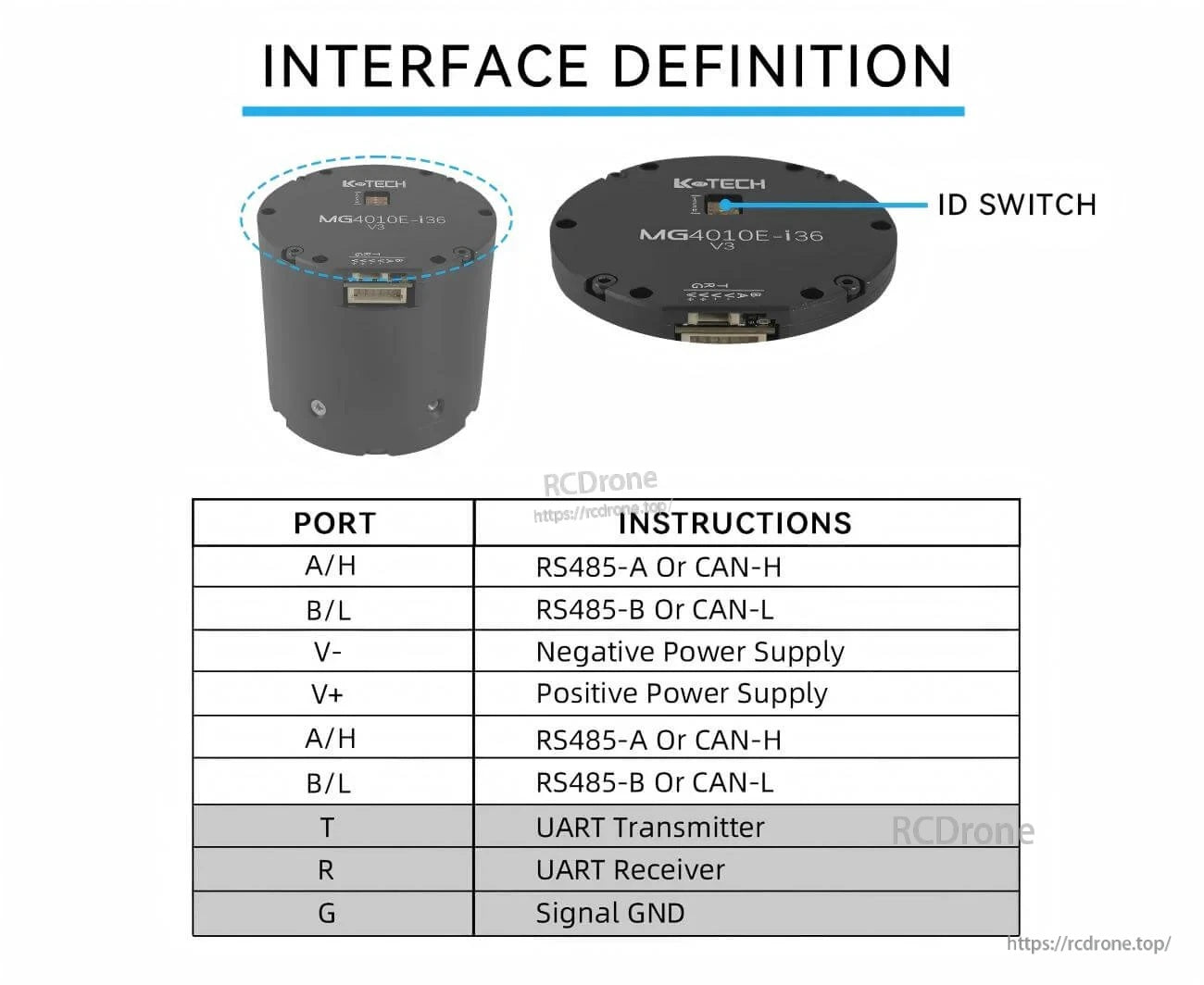
Le câblage est simplifié avec des broches de bus RS485/CAN étiquetées, des connexions d'alimentation, UART Tx/Rx, masse de signal et un interrupteur d'identification intégré.
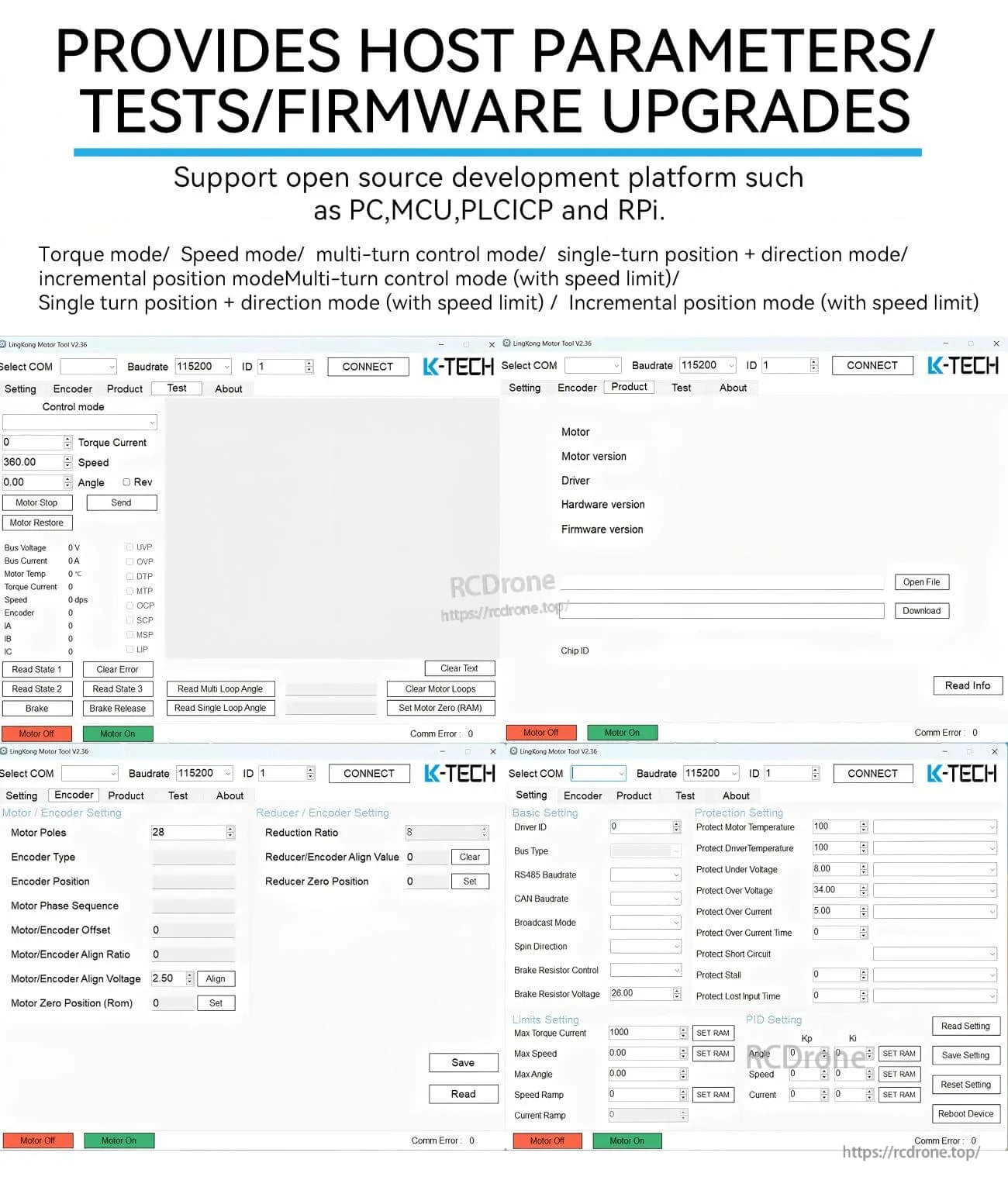
Le contrôle de frein intégré et les multiples modes de fonctionnement aident à ajuster le comportement pour différentes tâches de contrôle de mouvement et exigences de sécurité.
Related Collections




