




Moteur LKMTECH MG4010E-i36B-V3 24V 1:36 à engrenages planétaires avec frein, RS485/CAN, encodeur magnétique
Moteur LKMTECH MG4010E-i36B-V3 24V 1:36 à engrenages planétaires avec frein, RS485/CAN, encodeur magnétique
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MG4010E-i36B-V3 moteur est un moteur à réducteur planétaire avec frein intégré et retour d'encodeur, conçu pour l'actionnement en robotique où un contrôle précis du couple/vitesse/position et une intégration compacte sont nécessaires. Il prend en charge la communication RS485 ou CAN et est spécifié avec un réducteur PG4210 (1:36) et un encodeur magnétique double (18 bits moteur + 14 bits réducteur).
Caractéristiques clés
- Réducteur planétaire : PG4210, rapport de réduction 1:36, jeu ≤12 arcmin
- Encodeur : encodeur magnétique 18 bits (moteur) + 14 bits (réducteur)
- Communication : RS485 ou CAN
- Boucles de contrôle : Boucle de couple (32KHz) / Boucle de vitesse (8KHz) / Boucle de position (4KHz)
- Courbe d'accélération : Accélération trapézoïdale
- Frein : BG4906, couple de frein 0.6N.m
- Température du moteur : OUI
Spécifications techniques
| Nom de l'article | MG4010E-i36B-V3 |
| Tension nominale | 24V |
| Vitesse max | 90RPM |
| Vitesse nominale | 77RPM |
| Couple nominal | 6N.m |
| Couple max | 13N.m |
| Courant nominal | 2.4A |
| Puissance max | 132W |
| Constante de vitesse | 3rpm/V |
| Constante de couple | 2.58N.m/A |
| Tours | 14 |
| Type d'enroulement | Y |
| Résistance de phase | 0.68Ω |
| Inductance de phase | 0.25mH |
| Poles du moteur | 28 |
| Inertie du rotor | 158gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG4210 |
| Rapport de réduction | 1:36 |
| Jeu | ≤12 arcmin |
| Charge nominale du roulement | 1120N |
| Poids du moteur | 542.5g |
| Type de frein | BG4906 |
| Couple de frein (N.m) | 0.6N.m |
| Tension de démarrage (V) | 24V |
| Tension de maintien (V) | 7V |
| Puissance de maintien (W) | 1.4W |
| Recommandation de conduite | DG40E |
| Tension d'entrée de l'entraînement | 7.4-32V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 18 bits(moteur)+14 bits(réducteur) |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M |
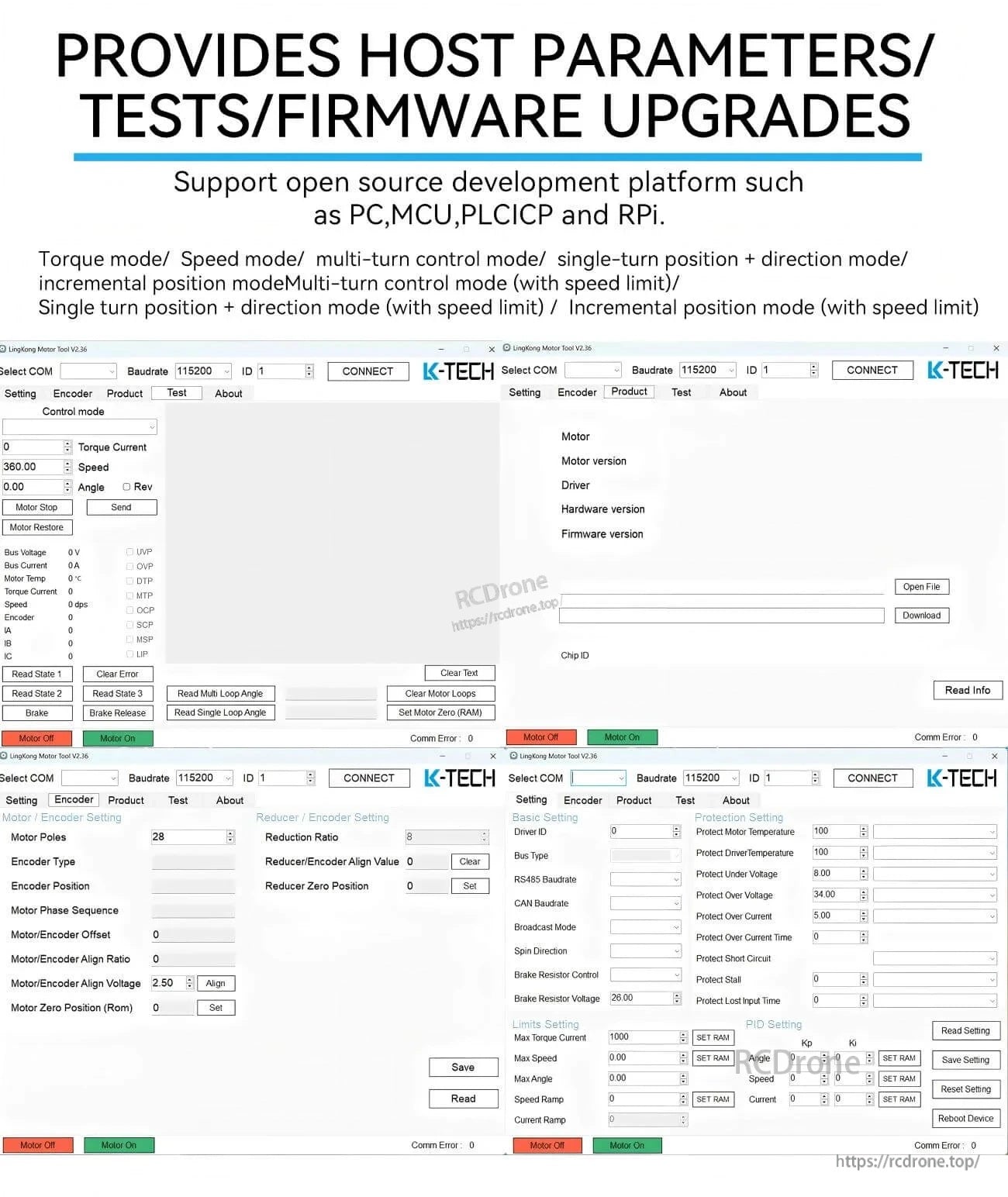
| Mode de contrôle | Boucle de couple(32KHz)/Boucle de vitesse(8KHz)/Boucle de position(4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Définition de l'interface (Ports)
Signification des ports pour cette série de moteurs:
- A/H: RS485-A ou CAN-H
- B/L: RS485-B ou CAN-L
- V-: Alimentation négative
- V+: Alimentation positive
- T: Émetteur UART
- R: Récepteur UART
- G: Signal GND
- Interrupteur ID
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels / Documents
Pour un support d'intégration et des vérifications de compatibilité avant-vente, contactez [email protected] or visitez https://rcdrone.top/.
Détails

Le boîtier compact du réducteur planétaire intègre le frein et l'interface embarquée dans un seul actionneur package.
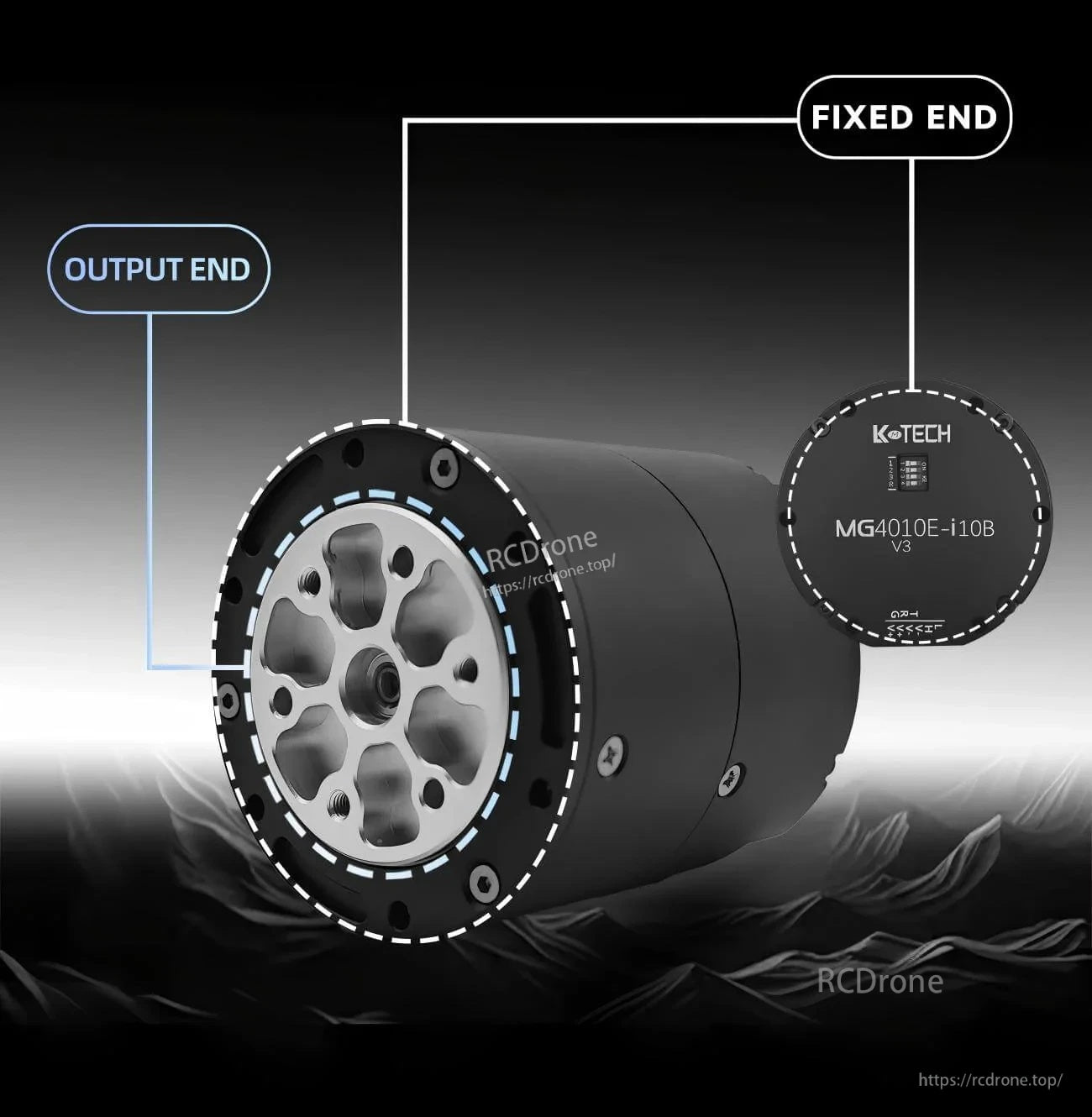
Une extrémité de sortie clairement définie et une extrémité fixe aident à simplifier l'intégration mécanique et l'alignement dans les assemblages.

Le retour d'encodeur et la communication par bus soutiennent un contrôle stable du couple, de la vitesse et de la position pour les articulations robotiques.
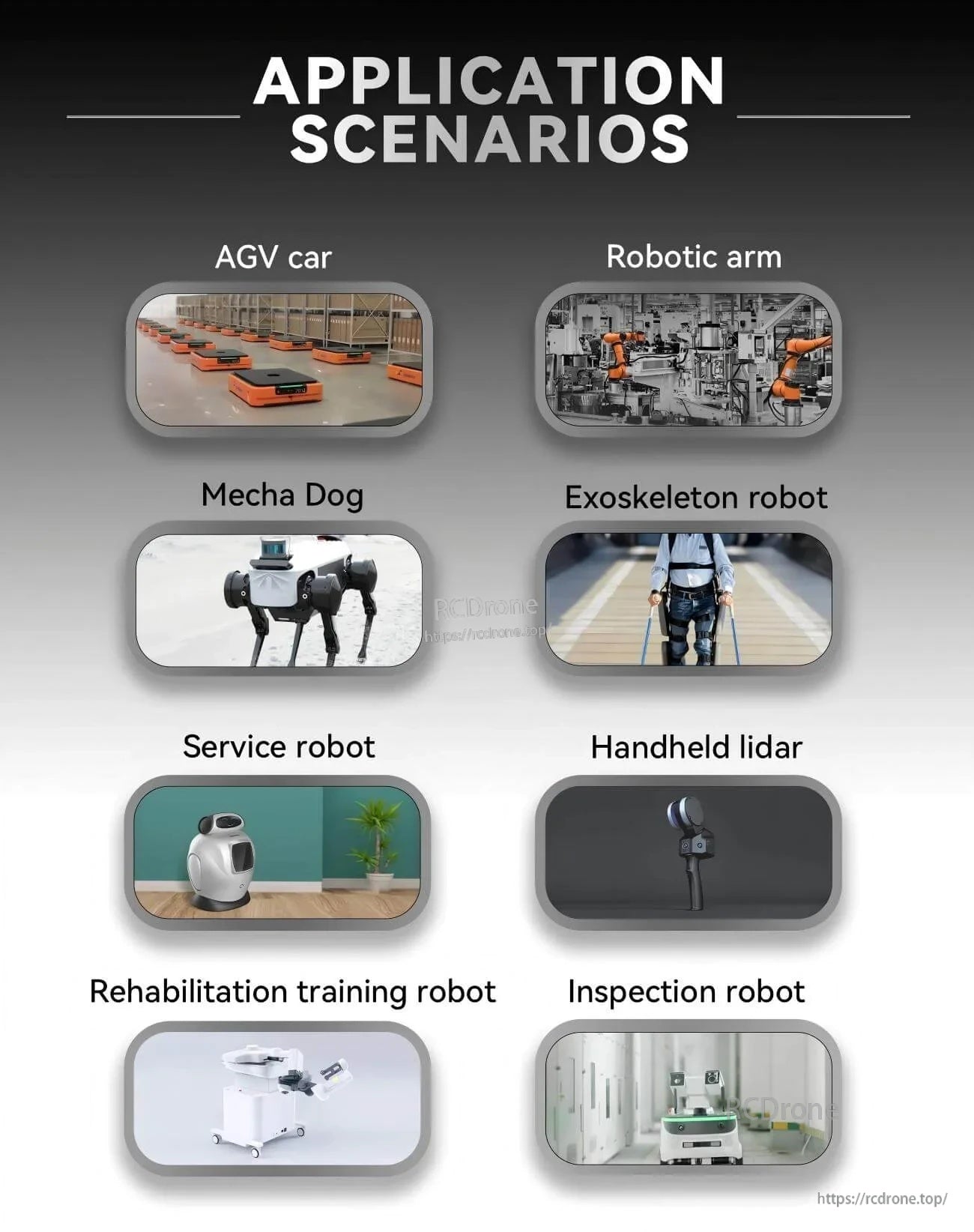
Conçu pour des tâches d'actionnement de robots allant des AGV et bras robotiques aux robots à pattes et systèmes d'exosquelettes.
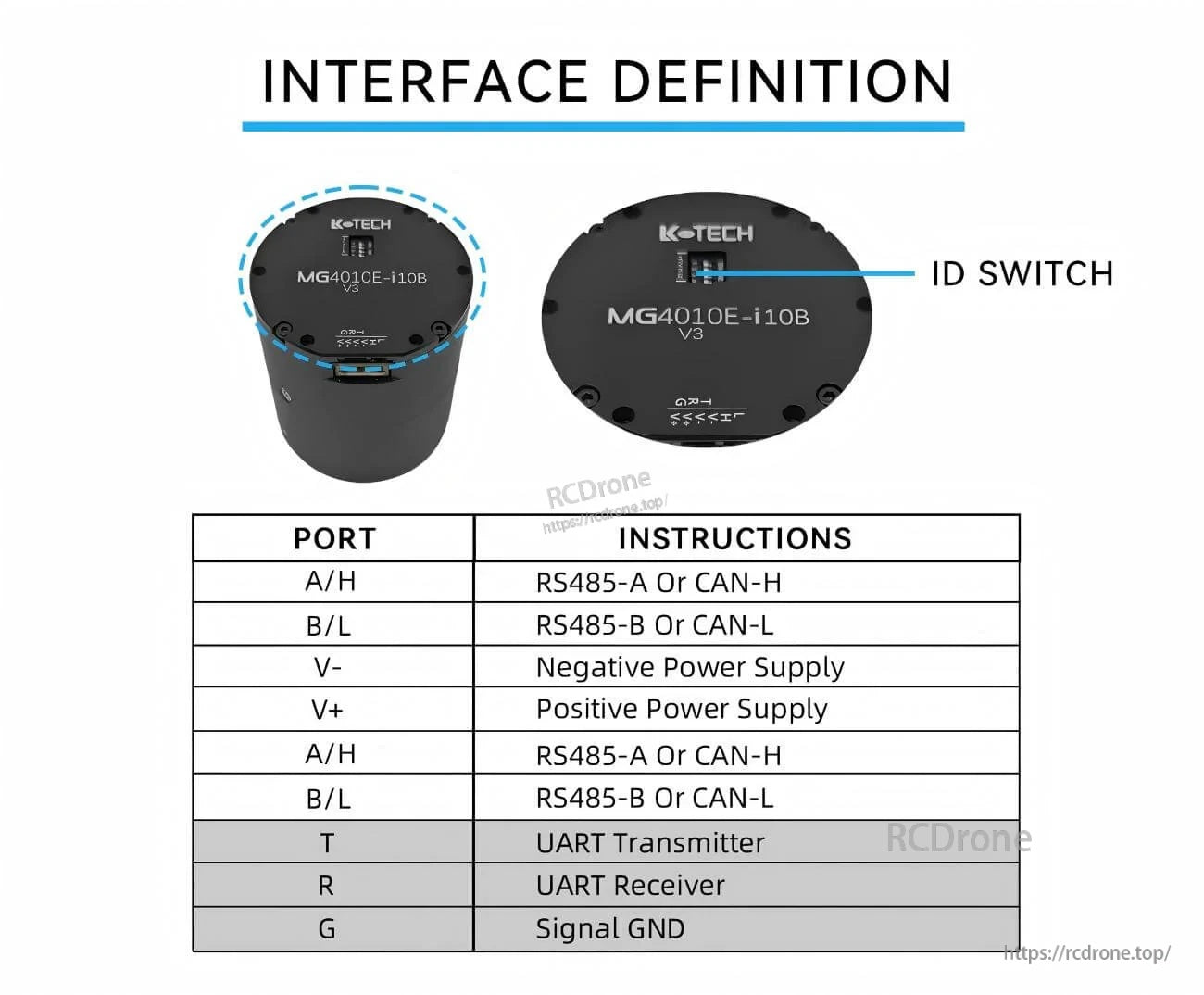
Les définitions de ports couvrent l'alimentation, le câblage RS485/CAN et les broches UART, avec un interrupteur ID embarqué pour l'adressage.

Related Collections




