




Moteur sans balais LKMTECH MG8010-i36-V2 avec réducteur planétaire 1:36, 48V 800W, CAN/RS485, encodeur 18 bits
Moteur sans balais LKMTECH MG8010-i36-V2 avec réducteur planétaire 1:36, 48V 800W, CAN/RS485, encodeur 18 bits
LKMTECH
Prix habituel
$677.00 USD
Prix habituel
Prix promotionnel
$677.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
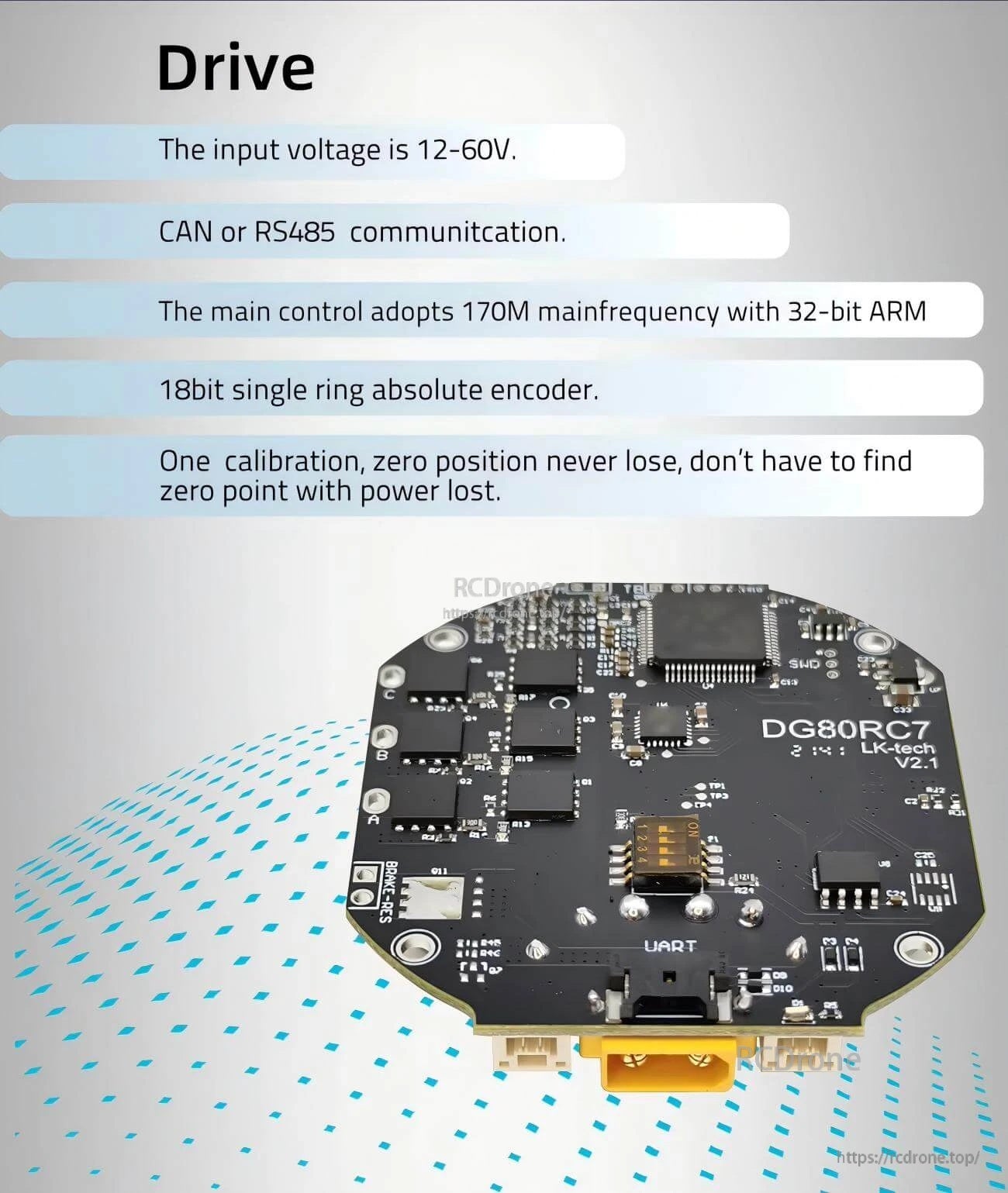
Le LKMTECH MG8010-i36-V2 Moteur est un moteur sans balais avec un réducteur planétaire intégré pour l'actionnement robotique, offrant un couple de sortie élevé et une précision. Les options de communication incluent CAN ou RS485, et il utilise un encodeur magnétique de 18 bits pour le retour d'information.
Caractéristiques clés
- Haute puissance de sortie, couple de sortie élevé, haute précision
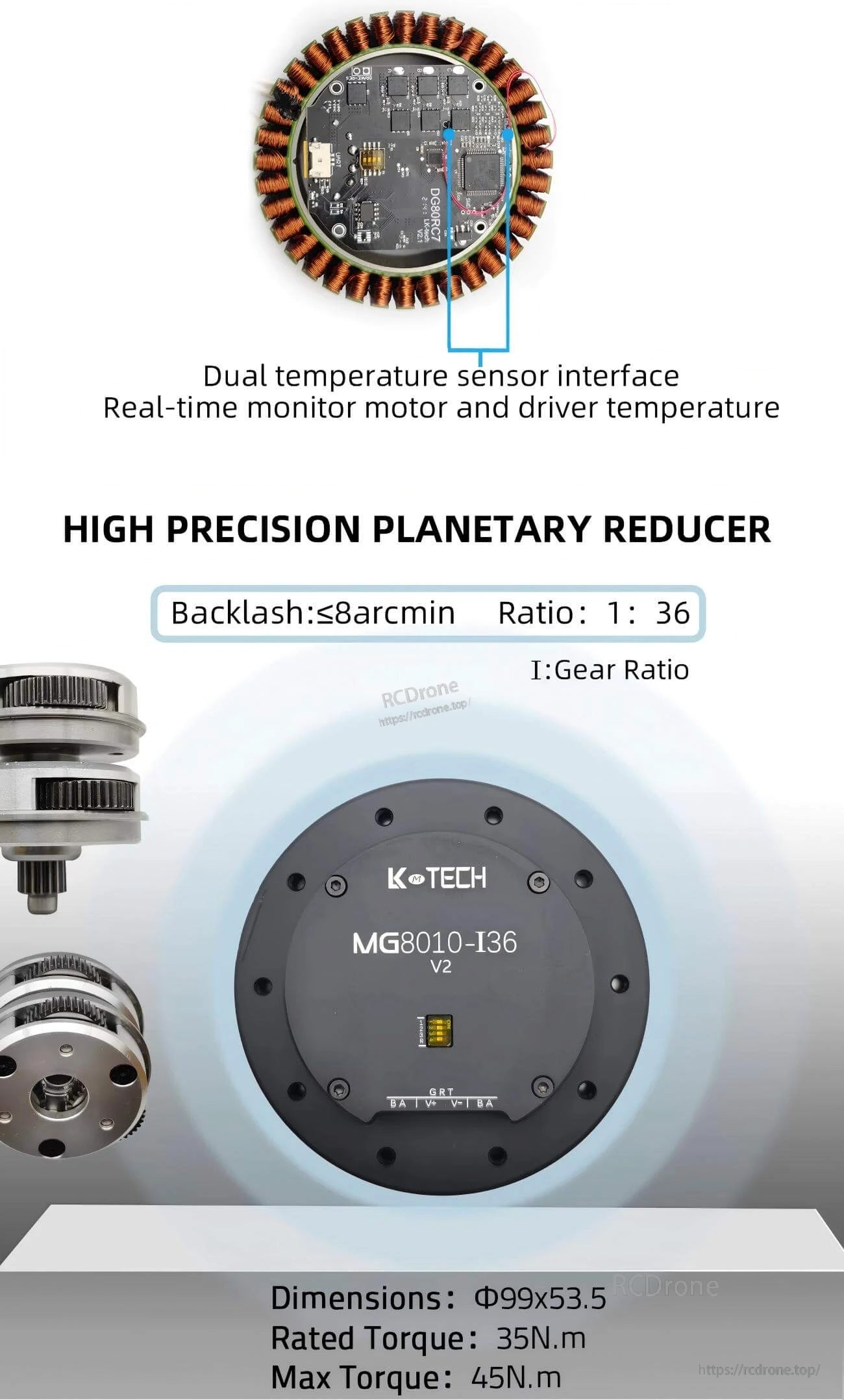
- Réducteur planétaire de haute précision
- Communication CAN ou RS485
- Encodeur absolu à anneau unique de 18 bits / Encodeur magnétique de 18 bits
- Interface de capteur de température double pour la surveillance en temps réel de la température du moteur et du pilote
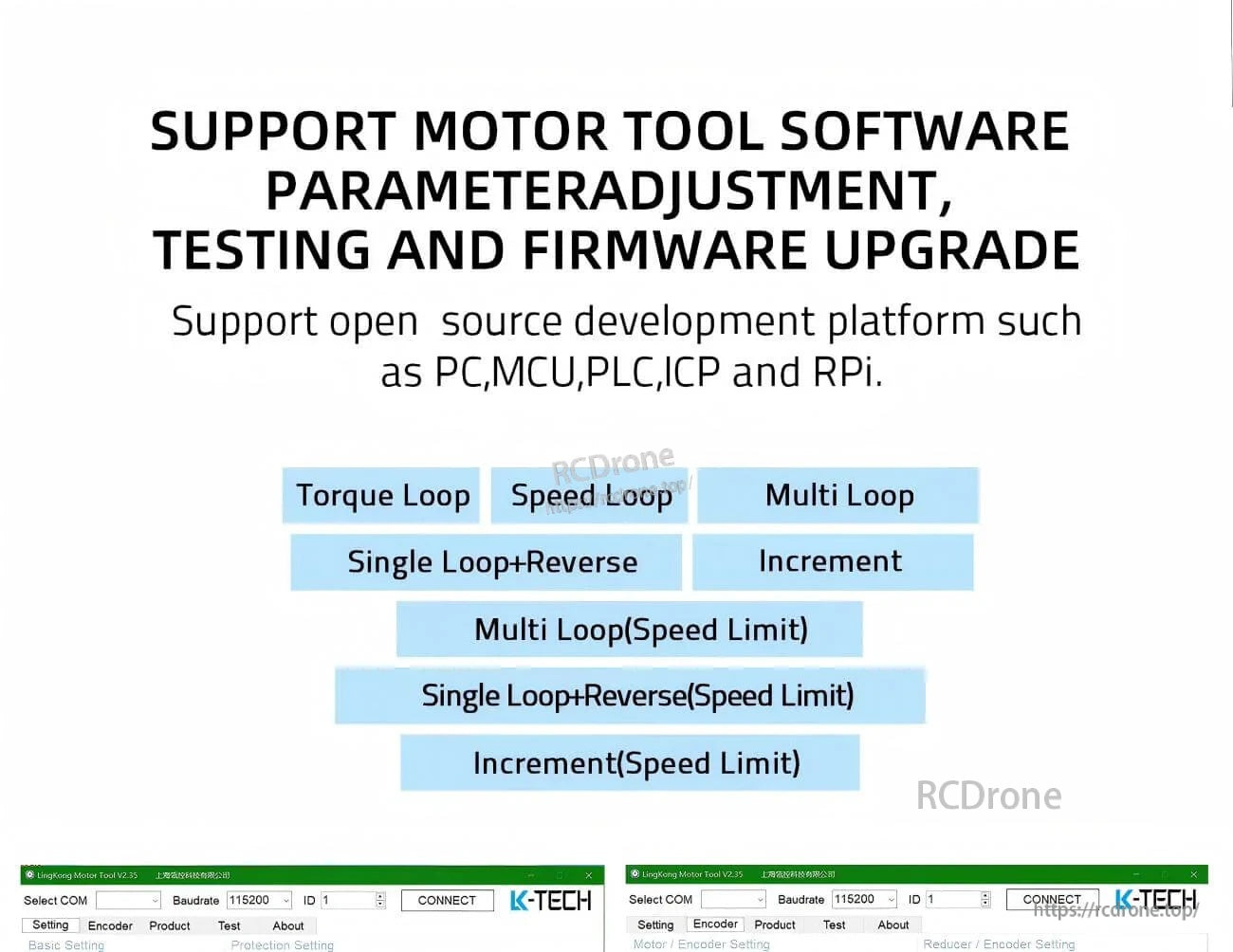
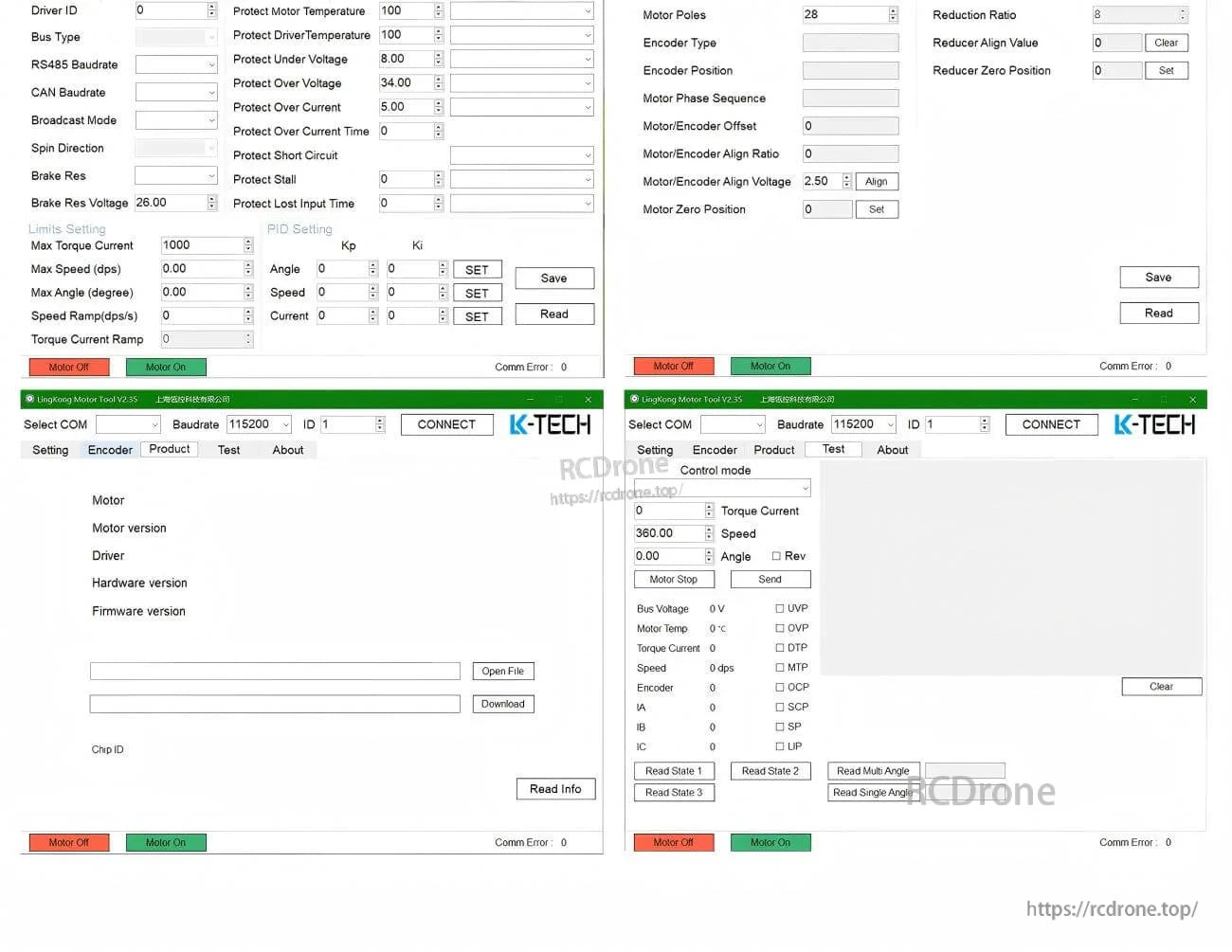
- Support logiciel d'outil moteur pour l'ajustement des paramètres, les tests et la mise à jour du firmware
- Prend en charge des plateformes de développement open source telles que PC, MCU, PLC, ICP et RPi
Spécifications
| Nom de l'article | MG8010-i36v2 |
| Tension nominale | 48V |
| Vitesse maximale | 80RPM |
| Vitesse nominale | 68RPM |
| Couple nominal | 35N.m |
| Couple maximal | 45N.m |
| Courant nominal | 6.9A |
| Puissance maximale | 800W |
| Vitesse constante | 51rpm/V |
| Couple constant | 0.15N.m/A |
| Tours | 17 |
| Type d'enroulement | Delta (Δ) |
| Résistance de phase | 0.27Ω |
| Inductance de phase | 0.23mH |
| Poles du moteur | 40 |
| Inertie du rotor | 2670gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG5536 |
| Rapport de réduction | 1:36 |
| Jeu | ≤8 arcmin |
| Charge nominale du roulement | 1770N |
| Poids du moteur | 860g |
| Dimensions | Φ99 x 53.5 |
| Recommander Drive | DG60 |
| Tension d'entrée du Drive | 12-60V |
| Communication | RS485 ou CAN |
| Fréquence de communication | RS485 : 500Hz (115200bps) / CAN : 2KHz (1Mbps) |
| Encodeur | Encodeur magnétique 18 bits |
| Débit de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit (CAN) | 1M |
| Mode de contrôle | Boucle de couple (32KHz) / Boucle de vitesse (8KHz) / Boucle de position (4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
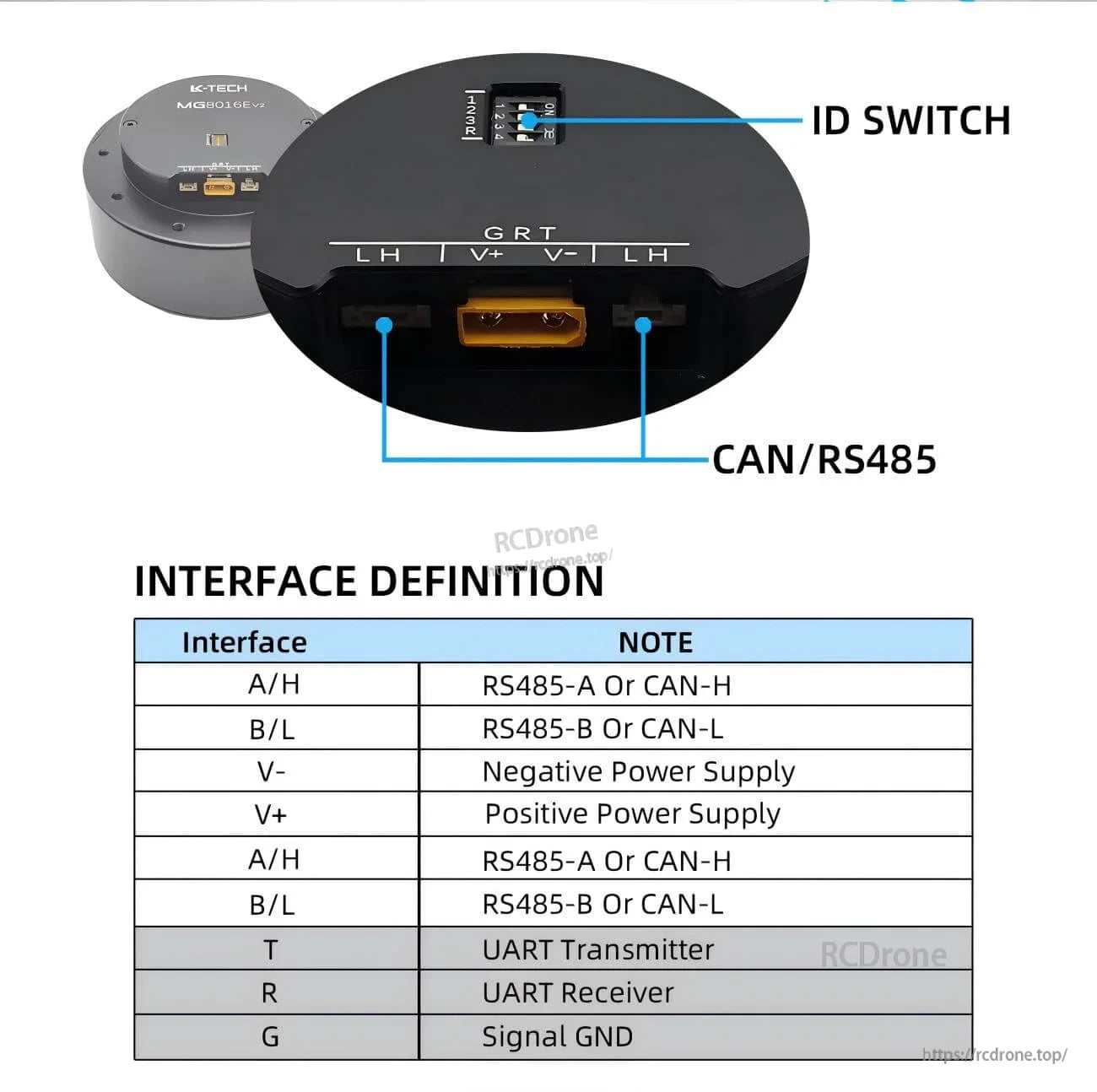
Définition de l'interface
- Interrupteur ID : 1, 2, 3, 4 (ON)
- Marquage de l'interface : GRT / LH / V+ / V- / LH
| Interface | Note |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robots portables
- Robots quadrupèdes (chien robot)
- Véhicules AGV (voiture AGV)
- Robots ARU
Manuels / Documents
Pour le câblage, la sélection de l'entraînement et le support d'intégration (CAN/RS485), contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected] .
Détails



Related Collections




