




Moteur LKMTECH MG8015E-i9-V3 48V 670W 216RPM 14N.m Réducteur planétaire 1:9 RS485/CAN Encodeur
Moteur LKMTECH MG8015E-i9-V3 48V 670W 216RPM 14N.m Réducteur planétaire 1:9 RS485/CAN Encodeur
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
LKMTECH MG8015E-i9-V3 moteur est une solution de moteur haute puissance, couple élevé, haute précision avec un réducteur à vis planétaire et une option de contrôle FOC pour les joints de robotique et d'automatisation. Il prend en charge la communication RS485 ou CAN bus, des encodeurs doubles (moteur + réducteur), et une interface de capteur de température double pour la surveillance en temps réel de la température du moteur et du pilote.
Caractéristiques clés
- Moteur sans balais haute puissance
- Réducteur à vis planétaire de haute précision
- Contrôle FOC haute performance (entrainement)
- Encodeur magnétique absolu à tour unique 18 bits
- Double encodeurs ; se souvient du point zéro après la coupure de courant
- Tension d'entrée (entrainement) : 12-60V
- Communication RS485 ou bus CAN
- Interface de double capteur de température ; surveillance en temps réel de la température du moteur et du driver
- Support pour l'ajustement des paramètres du logiciel d'outil moteur, tests et mise à jour du firmware
- Support pour des plateformes de développement open source telles que PC, MCU, PLC, ICP et RPi
- Mode de contrôle multiple : Contrôle de couple / Contrôle de vitesse / Contrôle d'angle à boucle multiple1 / Contrôle d'angle à boucle multiple2 / Contrôle d'angle à boucle unique1 / Contrôle d'angle à boucle unique2 / Contrôle d'angle incrémental1 / Contrôle d'angle incrémental2
- Multi protection : UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
- Fonction de frein de réserve : Frein / Libération du frein
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV / Voiture AGV
- Robots ARU
- Chien robot
- Robot portable
Spécifications
| Nom de l'article | MG8015E-i9-V3 |
| Tension nominale | 48V |
| Vitesse max | 216RPM |
| Couple nominal | 14N. |
| Vitesse nominale | 177RPM |
| Courant nominal | 6.8A |
| Puissance maximale | 670W |
| Couple maximal | 28N.m |
| Constante de vitesse | 40.5rpm/V |
| Constante de couple | 1.35N.m/A |
| Tours | 16 |
| Type d'enroulement | Y |
| Résistance de phase | 0.3Ω |
| Inductance de phase | 0.32mH |
| Poles du moteur | 42 |
| Inertie du rotor | 2570gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG5509 |
| Rapport de réduction | 1:9 |
| Jeu | ≤6 arcmin |
| Charge nominale du roulement | 1120N |
| Poids du moteur | 705g |
| Taille | Φ98*49.5 |
| Recommander Drive | DG60E |
| Tension d'entrée Drive | 12-60V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | 18 bits(Moteur) & 14 bits(Réducteur) Encodeur Magnétique |
| Débit de l'encodeur(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit(CAN) | 100000, 125000, 250000, 500000, 1M |
| Mode de contrôle | Boucle de couple(32KHz)/Boucle de vitesse(8KHz)/Boucle de position(4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Définition de l'interface
| Interface | Remarque |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Manuels
Pour des questions d'intégration (paramètres RS485/CAN, sélection de la vitesse en bauds ou correspondance de moteur), contactez le support à https://rcdrone.top/ ou par email [email protected] .
Détails

Le MG8015E-i9-V3 combine un moteur à couple élevé et un réducteur planétaire dans un ensemble compact prêt à l'emploi pour l'automatisation.

Associez le moteur à une option de commande FOC prenant en charge une entrée de 12 à 60V et un contrôle par RS485 ou bus CAN pour une intégration facile.

Des encodeurs absolus doubles sur le moteur et le réducteur aident à conserver la référence de position et soutiennent un contrôle de joint répétable après une coupure de courant.
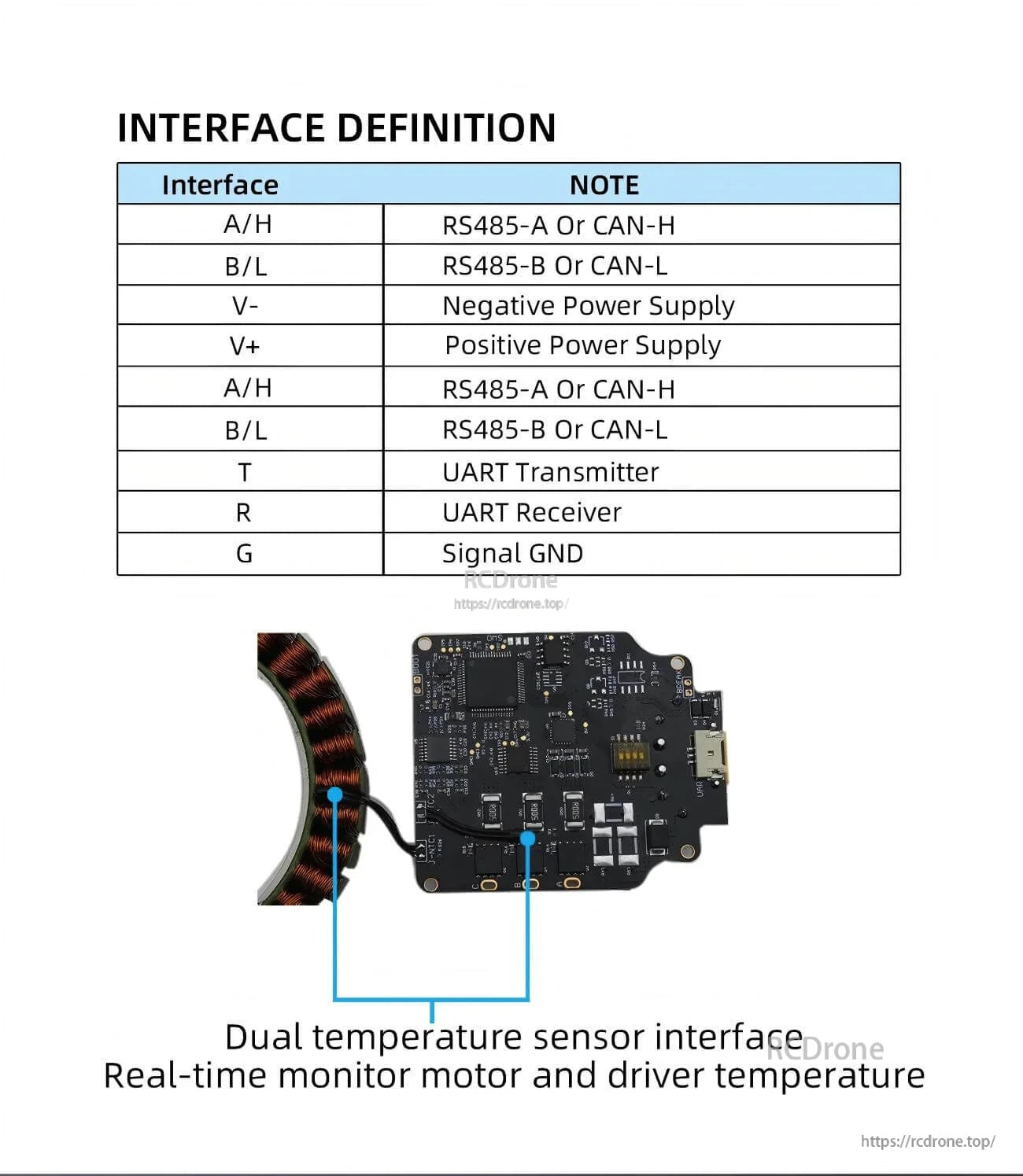
Un mappage de broche clair et des entrées de capteur de température doubles simplifient le câblage et permettent une surveillance thermique en temps réel.

Un réducteur planétaire 1:9 avec un faible jeu soutient un mouvement fluide et un couple stable pour les joints robotiques.
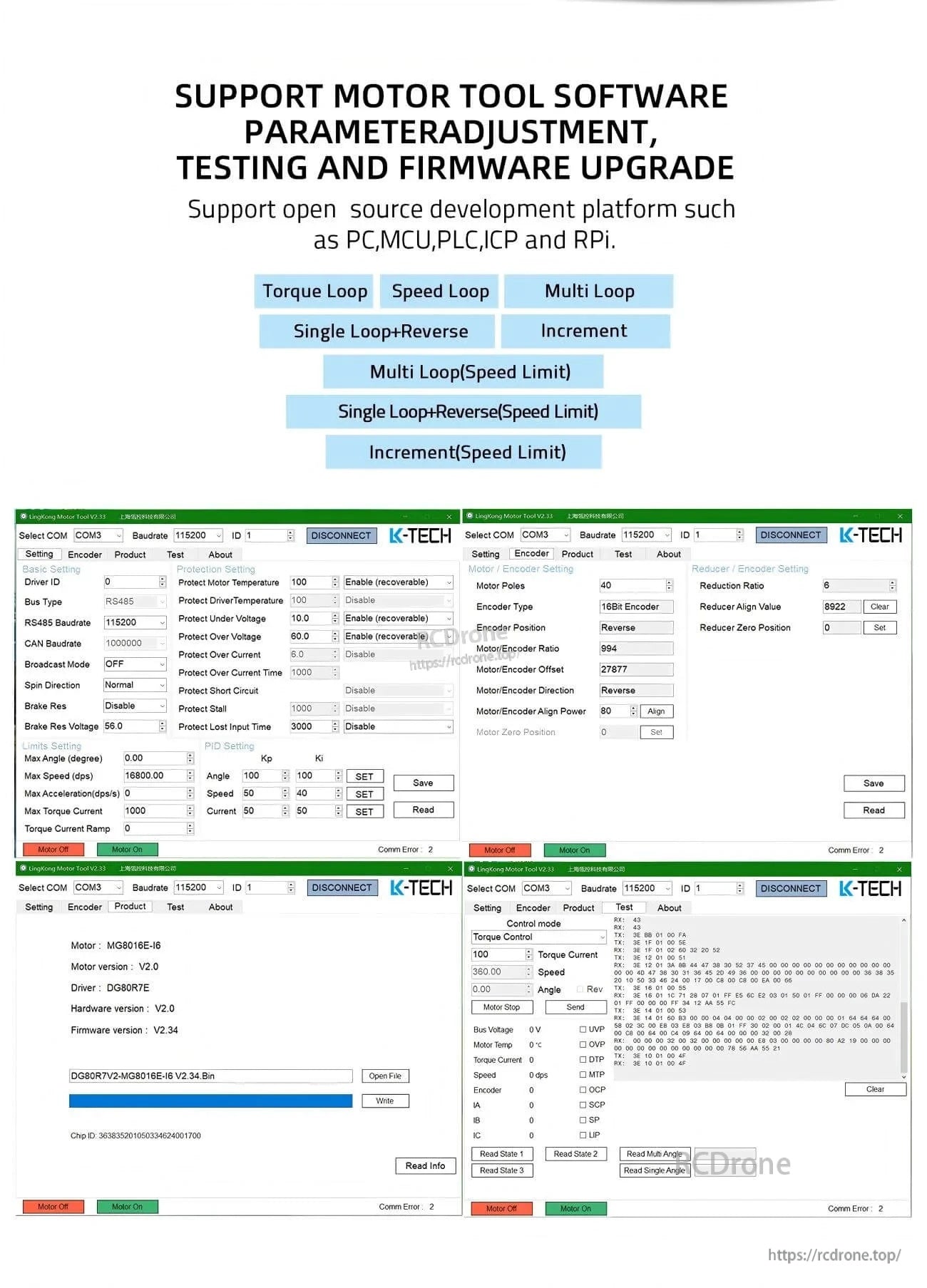
Le logiciel d'outil moteur prend en charge l'ajustement des paramètres, les tests et les mises à jour du firmware pendant la configuration et la mise en service.
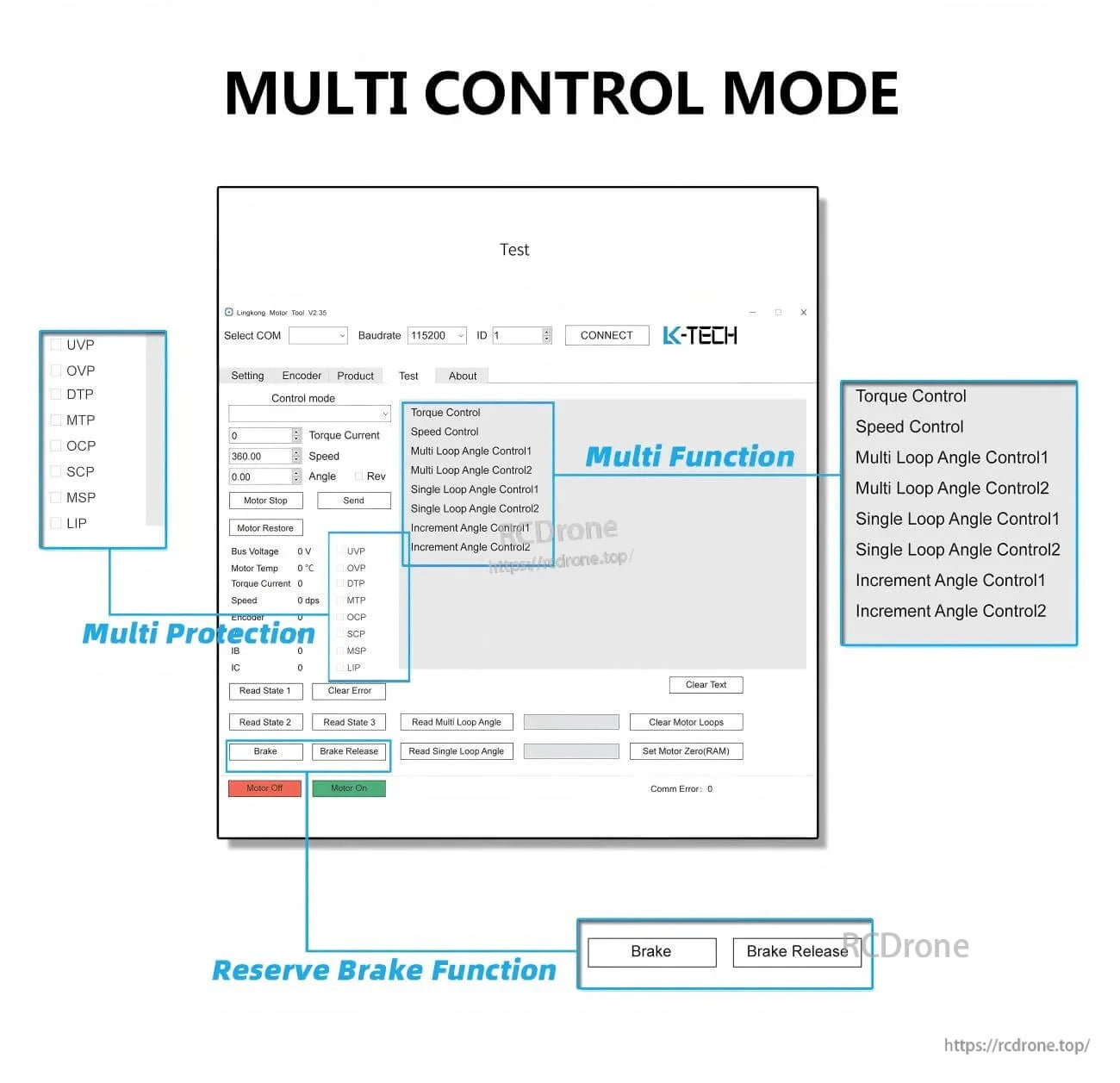
Plusieurs modes de contrôle ainsi que des fonctionnalités de protection et des commandes de frein soutiennent des stratégies de contrôle de mouvement flexibles.
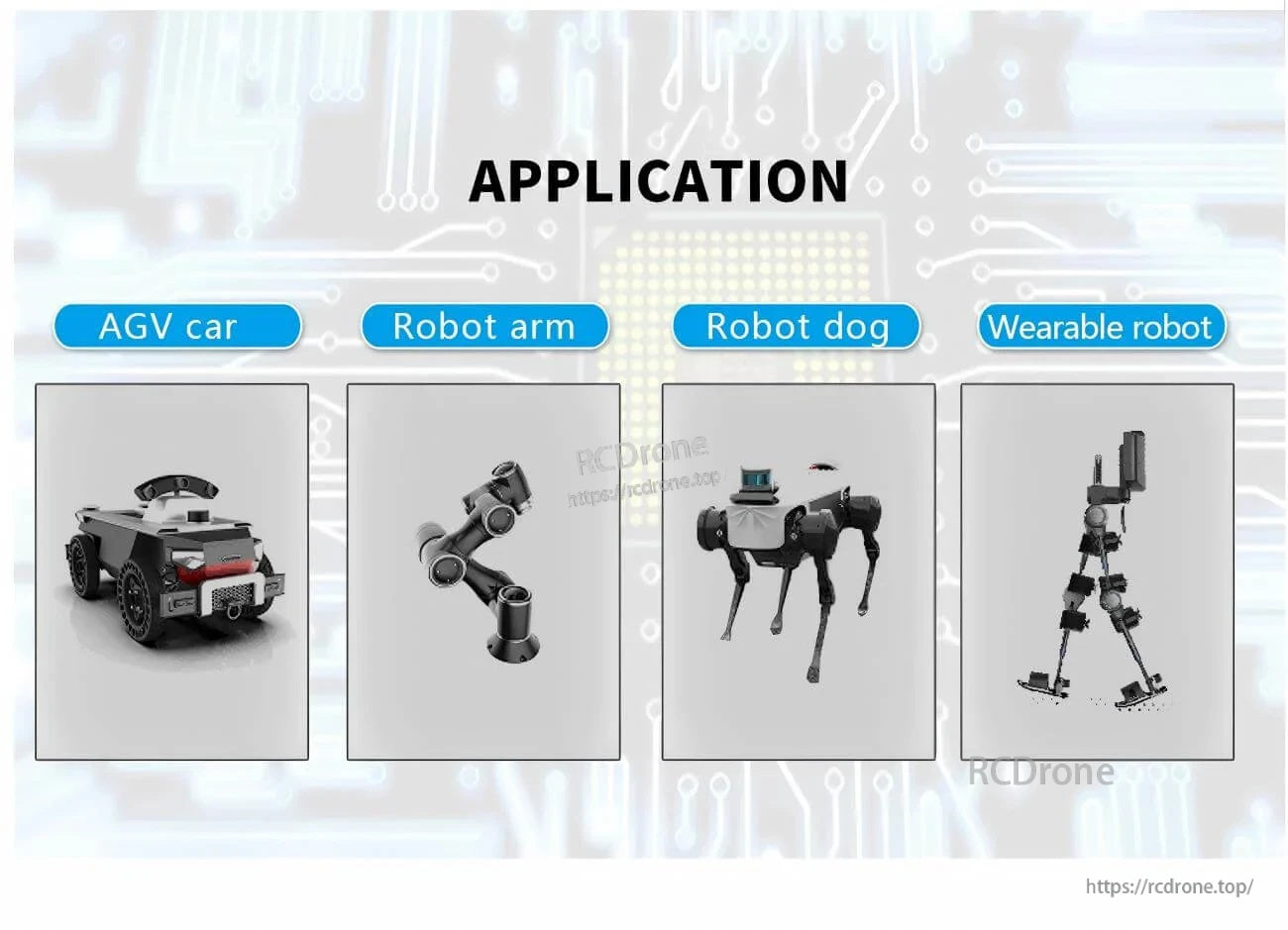
Conçu pour des plateformes de robotique et de mobilité telles que les AGV, les bras robotiques, les quadrupèdes et les robots portables.
Related Collections




