




Moteur LKMTECH MG8016E-i6-V2 48V 670W 12N.m Couple nominal Réducteur planétaire 1:6 RS485/CAN
Moteur LKMTECH MG8016E-i6-V2 48V 670W 12N.m Couple nominal Réducteur planétaire 1:6 RS485/CAN
LKMTECH
Prix habituel
$495.00 USD
Prix habituel
Prix promotionnel
$495.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH MG8016E-i6-V2 Moteur est un moteur sans balais avec réducteur planétaire intégré et encodeurs magnétiques pour des applications d'actionnement robotique et de contrôle de mouvement. Il est spécifié pour un fonctionnement à 48V et prend en charge le contrôle et la communication via RS485 ou CAN lorsqu'il est utilisé avec un entraînement compatible.
Caractéristiques clés
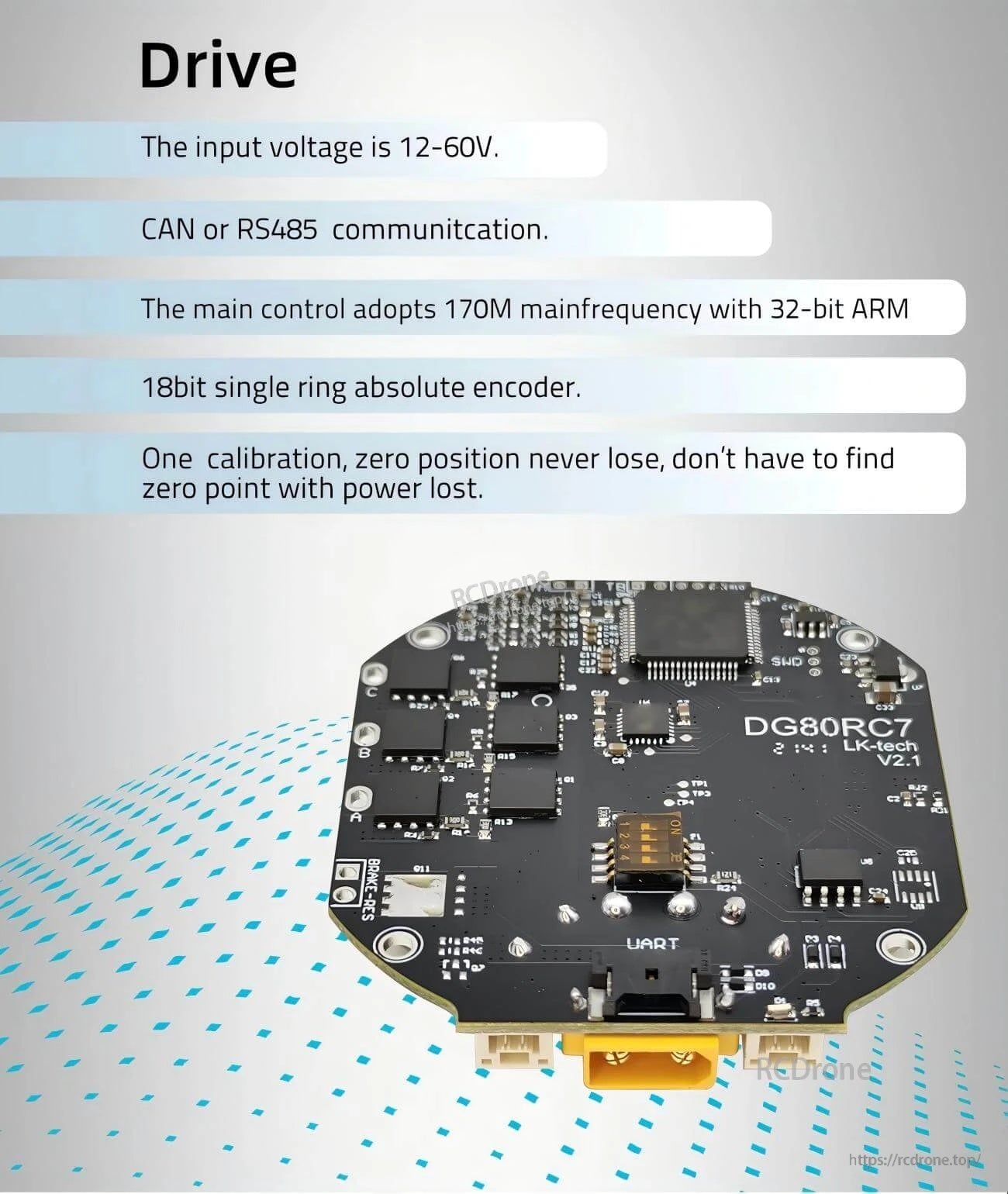
- Haute puissance de sortie, couple de sortie élevé, haute précision
- Moteur sans balais haute puissance
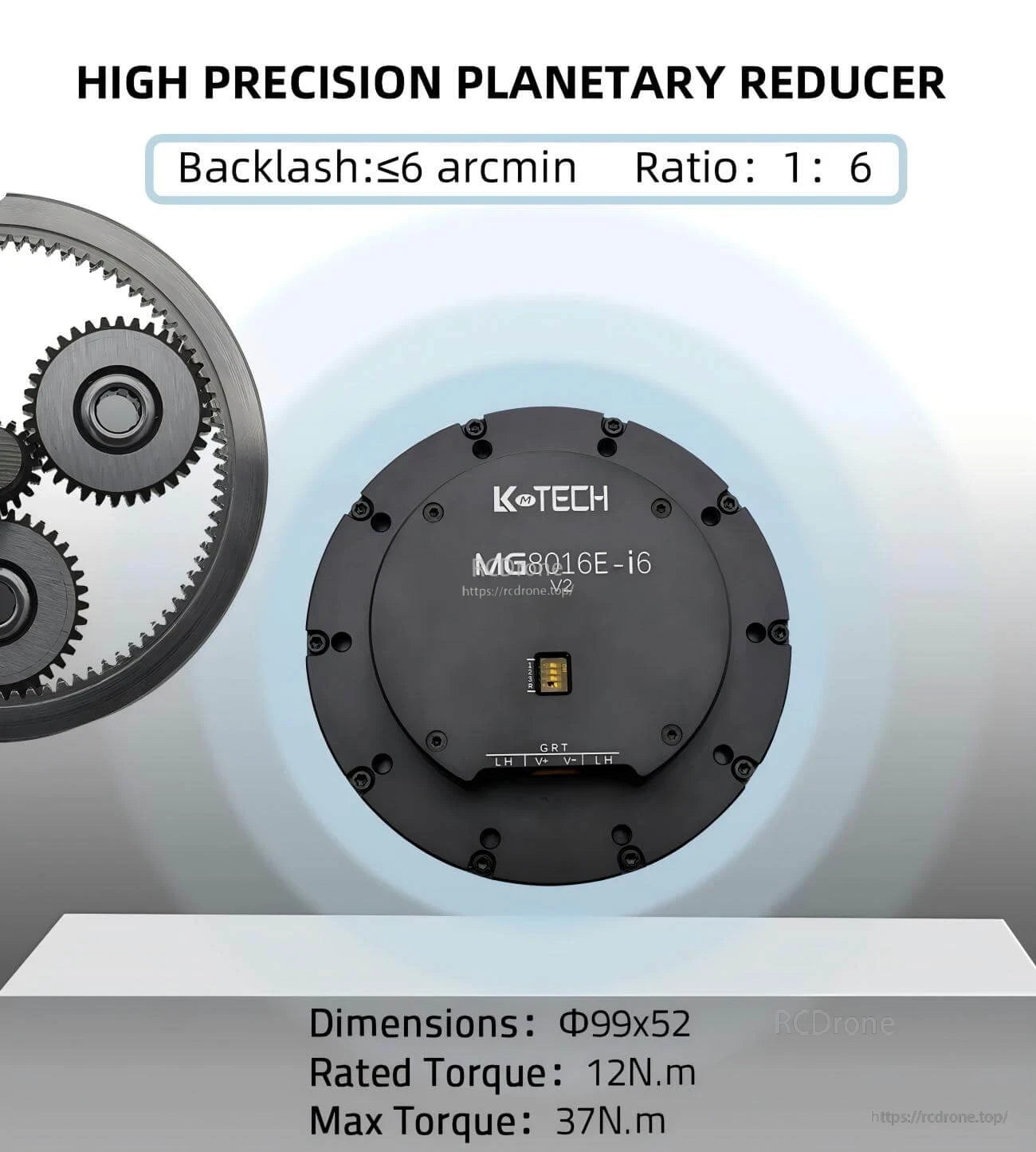
- Réducteur planétaire haute précision (jeu ≤6 arcmin, rapport 1:6)
- Encodeurs magnétiques : 18 bits (moteur) et 14 bits (réducteur)
- Connaissance de la position absolue (cercle unique) ; une calibration, position zéro non perdue après une coupure de courant
- Communication : RS485 ou CAN (avec fréquences de communication spécifiées)
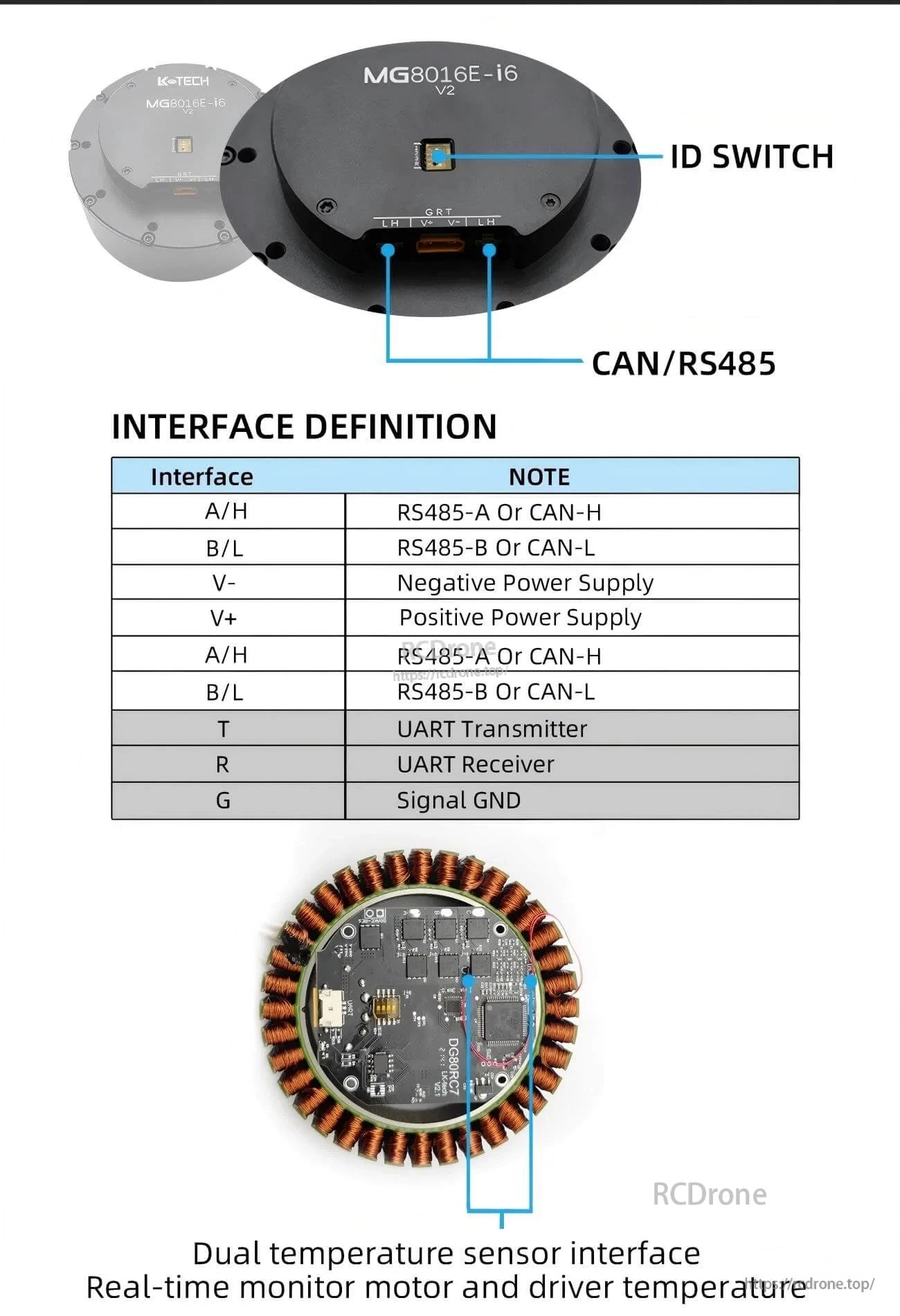
- Interface de capteur de température double pour la surveillance en temps réel de la température du moteur et du pilote
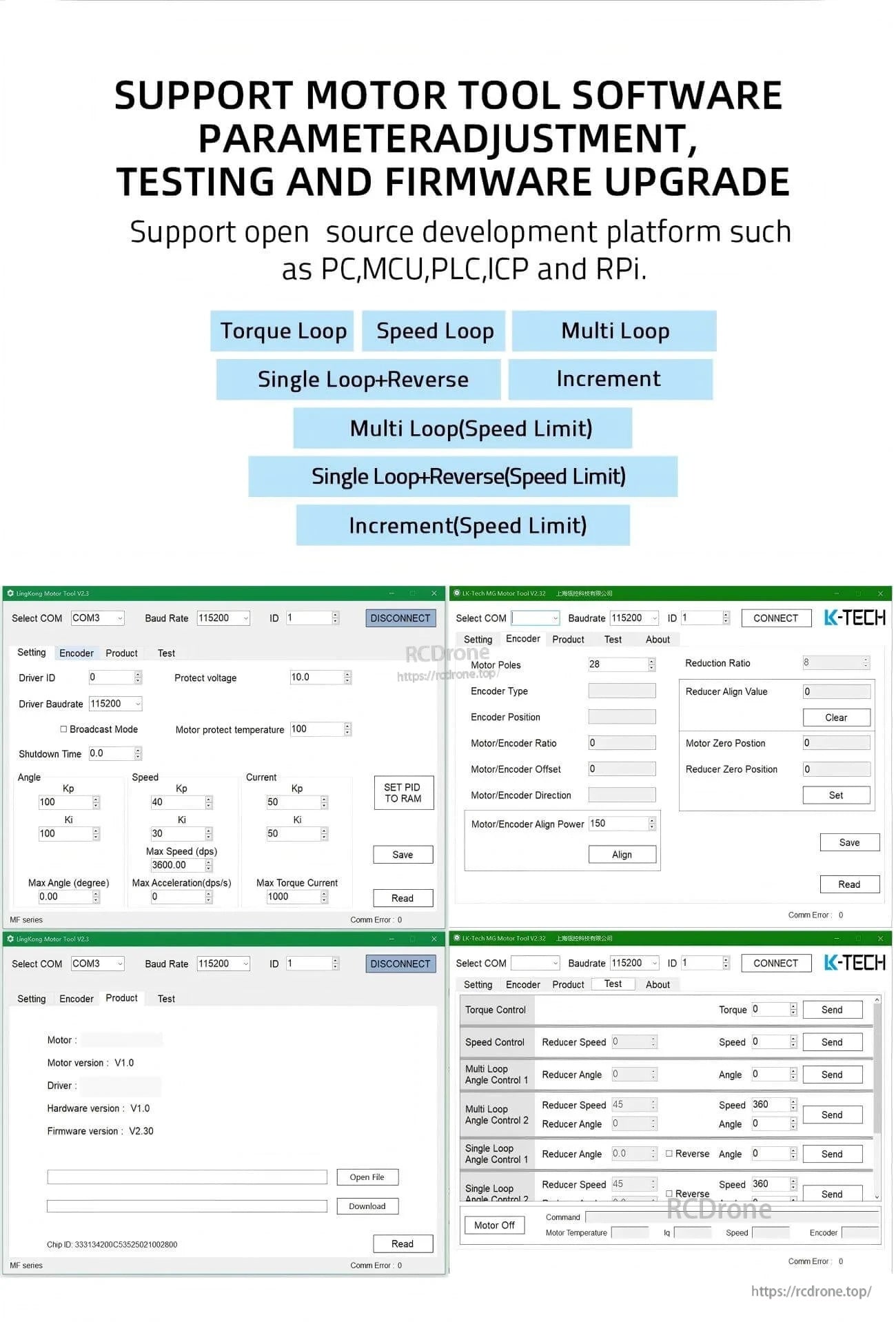
- Prend en charge le logiciel d'outil moteur pour l'ajustement des paramètres, les tests et la mise à niveau du firmware ; prend en charge des plateformes de développement ouvertes telles que PC, MCU, PLC, ICP et RPi
Pour des vérifications de compatibilité avant-vente et un support d'intégration, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected].
Spécifications
| Nom de l'article | MG8016E-i6-V2 |
| Tension nominale | 48V |
| Vitesse max | 300RPM |
| Couple nominal | 12N.m |
| Vitesse nominale | 258RPM |
| Courant nominal | 8.4A |
| Puissance max | 670W |
| Couple max | 37N.m |
| Constante de vitesse | 41.7rpm/V |
| Constante de couple | 0.24N.m/A |
| Tours | 17 |
| Type d'enroulement | Δ |
| Résistance de phase | 0.6Ω |
| Inductance de phase | 0.6mH |
| Pôles du moteur | 40 |
| Inertie du rotor | 2570gcm² |
| Température du moteur | OUI |
| Type de réducteur | PG5506 |
| Rapport de réduction | 1:6 |
| Jeu | ≤6 arcmin |
| Charge nominale du roulement | 1120N |
| Poids du moteur | 759g |
| Dimensions | Φ99x52 |
| Recommandation de conduite | DG60E |
| Tension d'entrée du moteur | 12-60V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | 18 bits(Moteur)&14 bits(Réducteur)Encodeur Magnétique |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 1M |
| Mode de Contrôle | Boucle de Couple (32KHz)/Boucle de Vitesse (8KHz)/Boucle de Position (4KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Définition de l'Interface
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation Négative |
| V+ | Alimentation Positive |
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| T | Émetteur UART |
| R | Récepteur UART |
| G | Signal GND |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robots portables
- Robots quadrupèdes (chien robot)
- Véhicules AGV (voiture AGV)
- Robots ARU
Manuels
Détails




Related Collections




