




Moteur LKMTECH MHF6015-V3 24V 872RPM 3N.m Encodeur Magnétique 19 bits RS485/CAN pour Robotique
Moteur LKMTECH MHF6015-V3 24V 872RPM 3N.m Encodeur Magnétique 19 bits RS485/CAN pour Robotique
LKMTECH
Impossible de charger la disponibilité du service de retrait
Aperçu
Le LKMTECH moteur MHF6015-V3 est un moteur sans balais de 24V avec un encodeur magnétique de 19 bits et une communication RS485 ou CAN, conçu pour des applications de mouvement robotique telles que les robots humanoïdes, les bras robotiques, les exosquelettes et les véhicules AGV.
Caractéristiques clés
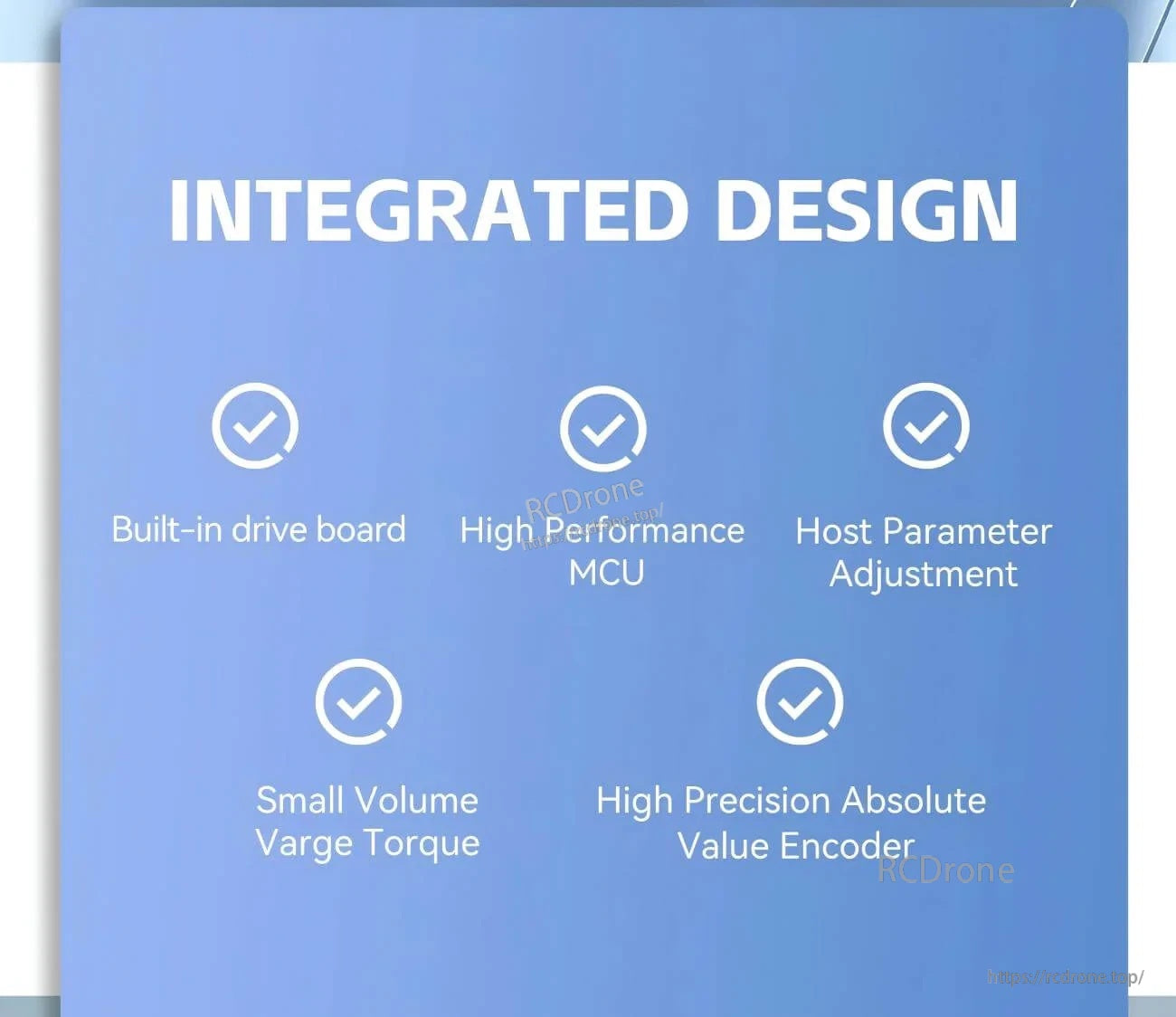
- Conception intégrée : carte de commande intégrée, MCU haute performance, ajustement des paramètres hôtes, petit volume et grand couple, encodeur de valeur absolue de haute précision.
- Conception creuse ; taille creuse indiquée comme 12,7 mm (12,6 mm affiché à l'intérieur de l'appel creux).
- Fonctionnement fluide ; certification CE (comme indiqué).
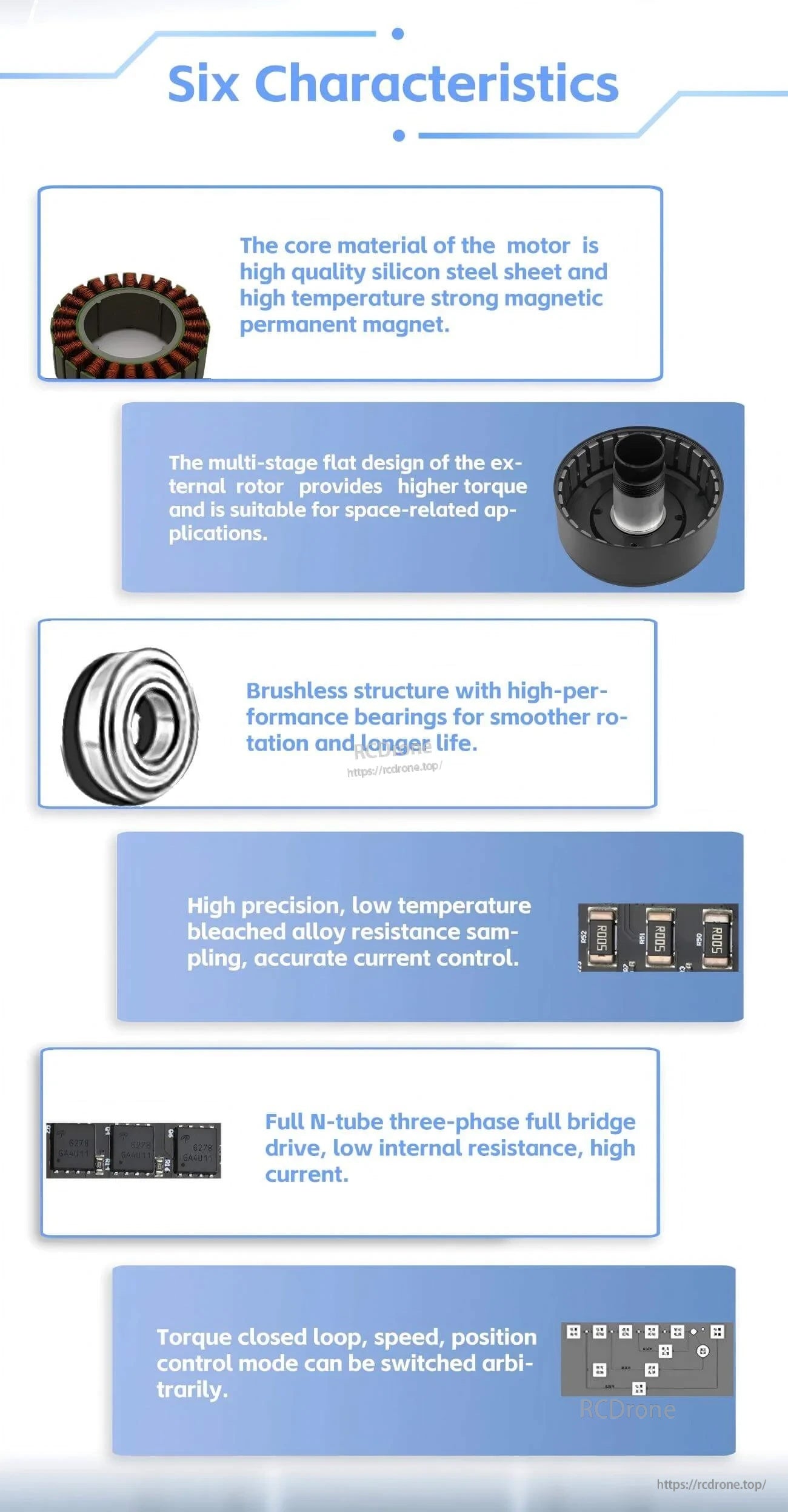
- Déclaration des matériaux de base : “Le matériau de base du moteur est une tôle d'acier au silicium de haute qualité et un aimant permanent à forte température.”
- Déclaration du rotor externe : “La conception plate multi-étagée du rotor externe offre un couple plus élevé et est adaptée aux applications liées à l'espace.”
- Déclaration sur les roulements : “Structure sans balais avec des roulements haute performance pour une rotation plus fluide et une durée de vie prolongée.”
- Déclaration sur l'échantillonnage/contrôle actuel : “Échantillonnage de résistance en alliage blanchi à basse température de haute précision, contrôle de courant précis.”
- Déclaration sur l'entraînement : “Entretien complet à trois phases avec pont complet N-tube, faible résistance interne, courant élevé.”
- Déclaration sur le contrôle : “Boucle fermée de couple, mode de contrôle de la vitesse et de la position pouvant être commuté arbitrairement.”
- Déclaration sur les paramètres/homologations/tests/ mises à jour du firmware ; prend en charge les plateformes de développement open source telles que PC, MCU, PLC, ICP et RPi.
- Déclaration sur les modes : Mode couple / Mode vitesse / mode de contrôle multi-tours / mode position + direction à un tour / mode de position incrémentale ; mode de contrôle multi-tours (avec limite de vitesse) / mode position + direction à un tour (avec limite de vitesse) / mode de position incrémentale (avec limite de vitesse).
Spécifications
| Nom de l'article | MHF6015-V3 |
| Révolutions | 25 |
| Tension nominale | 24V |
| Vitesse max | 872RPM |
| Couple nominal | 0.82N.m |
| Vitesse nominale | 560RPM |
| Courant nominal | 3.1A |
| Puissance max | 57W |
| Couple max | 3N.m |
| Constante de vitesse | 23.3rpm/V |
| Constante de couple | 0.26N.m/A |
| Type d'enroulement | Y |
| Résistance de phase | 2.17Ω |
| Inductance de phase | 1.44mH |
| Pôles du moteur | 28 |
| Inertie du rotor | 515gcm² |
| Température du moteur | OUI |
| Charge nominale du roulement | 280N |
| Poids du moteur | 251g |
| Recommandation de l'entraînement | DHF50 |
| Tension d'entrée de l'entraînement | 7.4-32V |
| Communication | RS485 OU CAN |
| Fréquence de communication | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encodeur | Encodeur magnétique 19 bits |
| Débit en bauds de l'encodeur (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Débit en bauds (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mode de contrôle | Boucle de couple (24KHz)/Boucle de vitesse (8KHz)/Boucle de position (8KHz) |
| Courbe d'accélération | Accélération trapézoïdale |
Pour des conseils de sélection ou un support d'intégration, contactez l'équipe du service client à https://rcdrone.top/ ou par email [email protected].
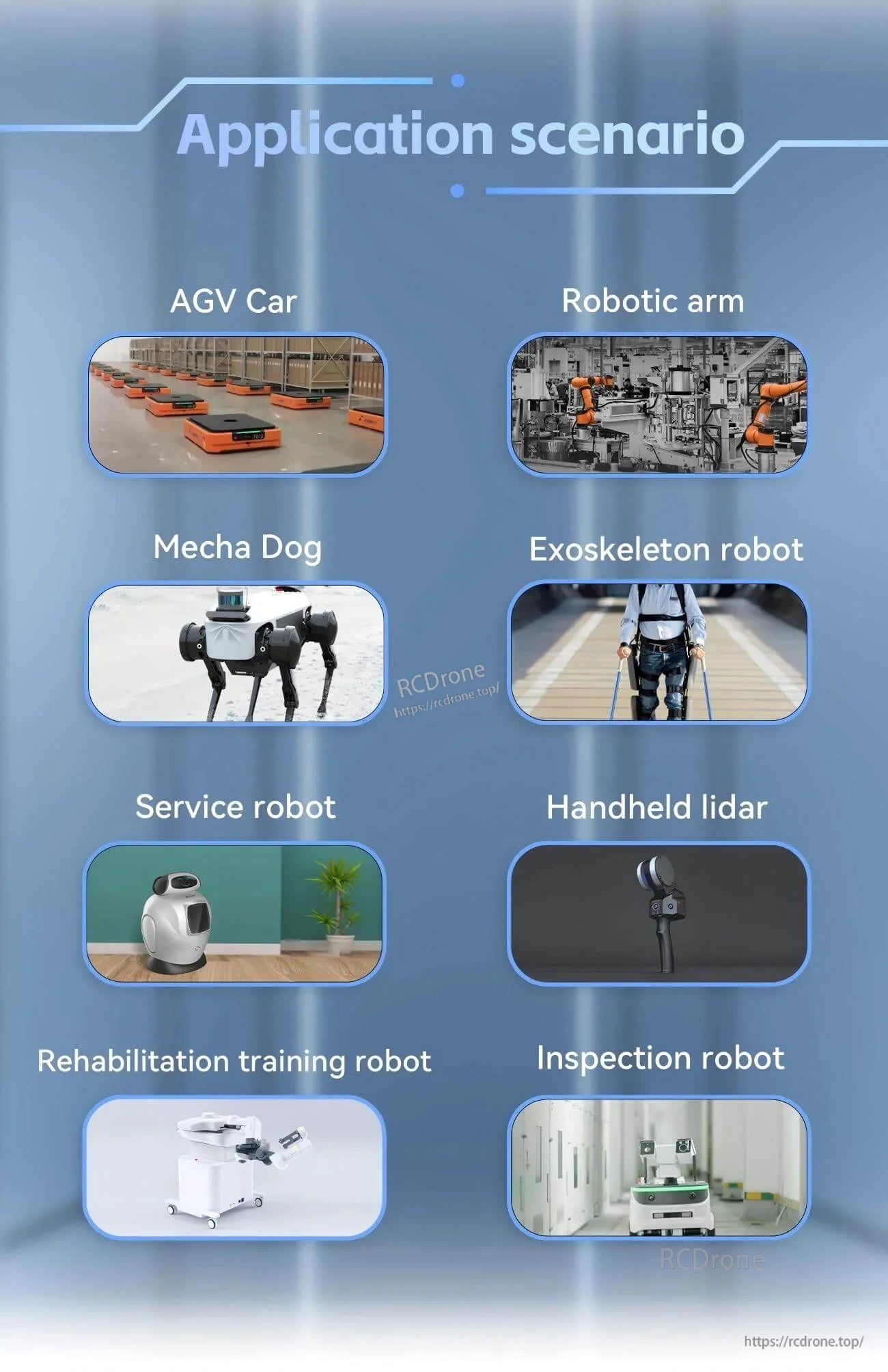
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes / robot exosquelette
- Robots quadrupèdes / chien mécha
- Véhicules AGV / voiture AGV
- Robots ARU
- Robot de service
- Lidar portable
- Robot de formation à la réhabilitation
- Robot d'inspection
Manuels / Documents
Détails

Un format de moteur intégré compact de type servo simplifie le câblage et l'assemblage pour les articulations robotiques.
Une carte de commande intégrée et un MCU supportent le réglage des paramètres depuis l'hôte pour une mise en service plus facile.

La configuration à arbre creux (alésage de 12,7 mm) aide à acheminer les câbles ou les arbres à travers le moteur pour des constructions plus propres.
Les notes de conception clés couvrent les matériaux, la structure de couple à rotor externe, les roulements et les capacités de contrôle en boucle fermée.
Conçu pour des tâches de mouvement en robotique telles que les AGV, les bras robotiques, les quadrupèdes, les exosquelettes et les robots de service.
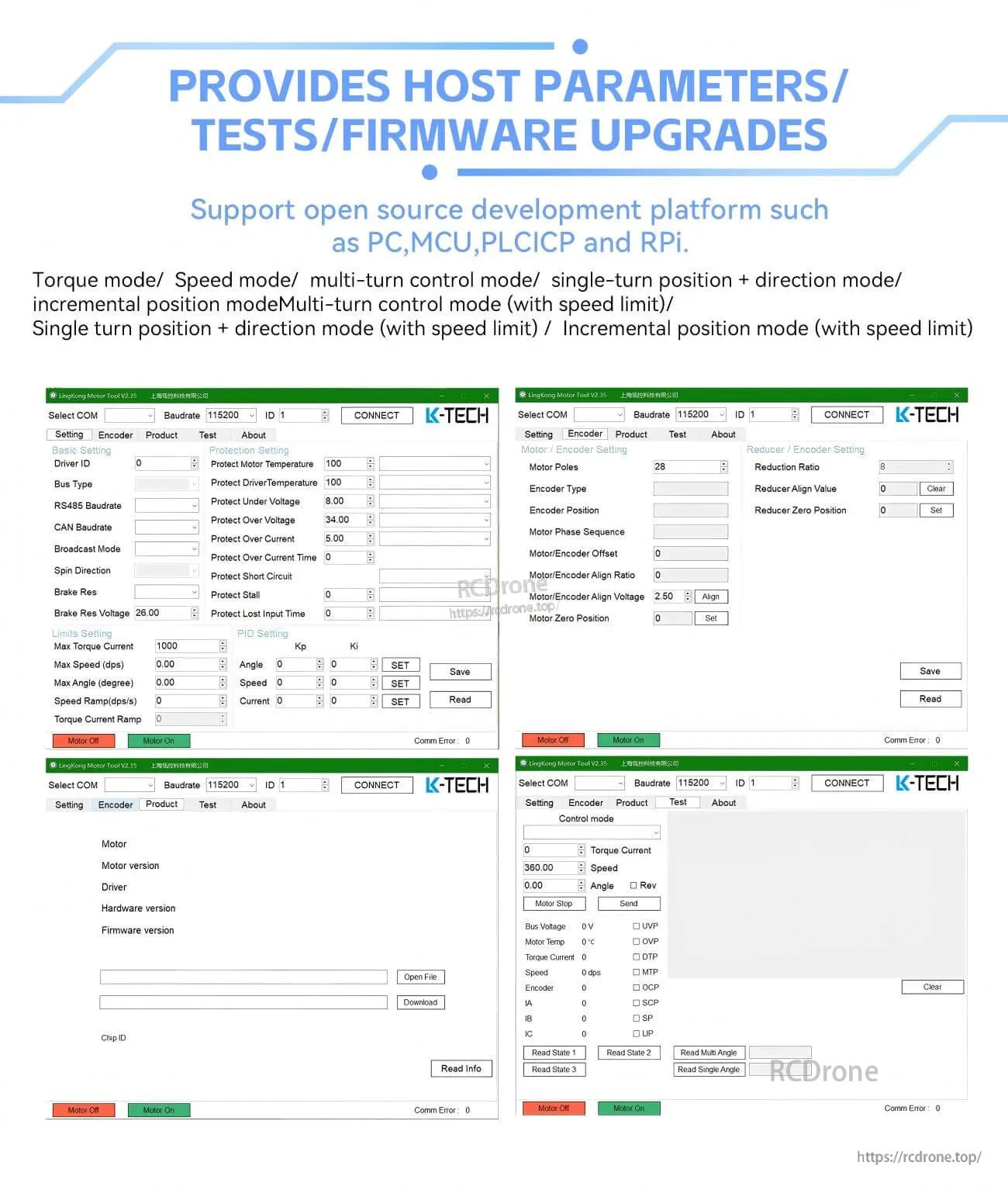
Les pages du logiciel PC illustrent la configuration des paramètres, les fonctions de test et le support de mise à niveau du firmware.

Related Collections




