




MagicLab P110 Moteur 360 N·m Couple de crête, Double encodeur, Entraînement d'articulation CAN/EtherCAT pour robots humanoïdes
MagicLab P110 Moteur 360 N·m Couple de crête, Double encodeur, Entraînement d'articulation CAN/EtherCAT pour robots humanoïdes
MagicLab
Impossible de charger la disponibilité du service de retrait
Aperçu
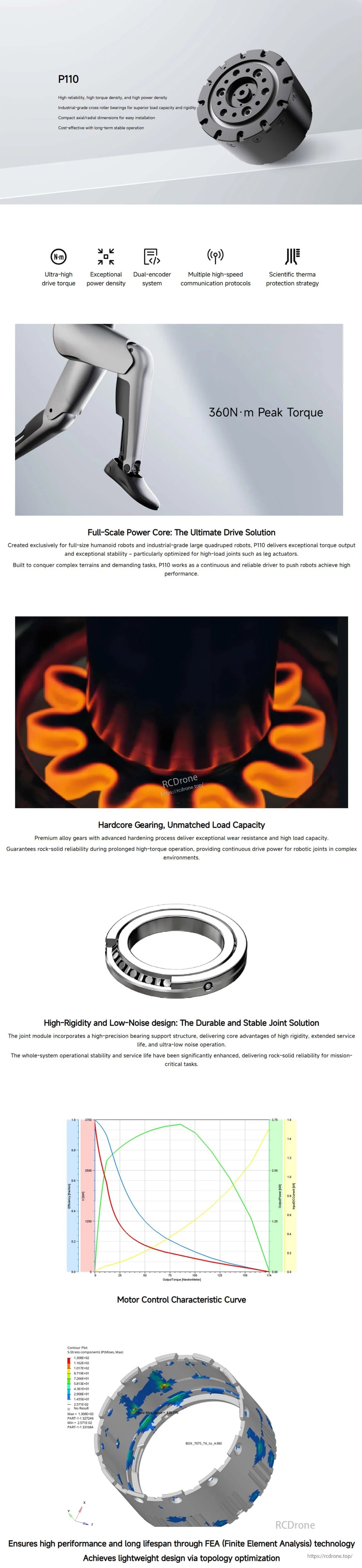
Le moteur MagicLab P110 est un moteur à entraînement à couple élevé conçu pour les articulations robotiques, doté d'un système à double encodeur et d'options de communication à haute vitesse (CAN / EtherCAT). Il est destiné aux articulations à forte charge telles que les actionneurs de jambes dans des robots humanoïdes de taille réelle et des robots quadrupèdes de qualité industrielle.
Caractéristiques clés
- Couple maximal de 360 N·m
- Couple de conduite ultra-élevé et densité de puissance exceptionnelle
- Système à double encodeur (résolution de l'encodeur moteur : 15 bits)
- Interface de communication : CAN / EtherCAT (plusieurs protocoles de communication haute vitesse)
- Stratégie de protection thermique scientifique
- Engrenage hardcore pour capacité de charge (engrenages en alliage premium avec processus de durcissement avancé)
- Conception à haute rigidité et faible bruit avec une structure de support de roulement de haute précision
- Technologie FEA (Analyse par Éléments Finis) pour des performances élevées et une longue durée de vie ; conception légère tout en maintenant la résistance
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Spécifications
| Vitesse maximale | 20 tr/min (alimentation 24V) |
| Poids du module | 1900g |
| Couple nominal | 90 N·m |
| Couple de pointe | 360 N·m |
| Dimensions | Φ112*71.5 |
| Tension de fonctionnement | 48V - 54V |
| Courant de pointe | 137 A |
| Interface de communication | CAN / EtherCAT |
| Configuration de l'encodeur | Encodeur double |
| Résolution de l'encodeur moteur | 15 bits |
| Fréquence de contrôle | 25 000 Hz |
| Environnement de fonctionnement recommandé | -5°C ~ 40°C |
Pour des questions d'intégration, d'interface ou de configuration, contactez [email protected] or visitez https://rcdrone.top/.
Détails
Conçu pour des articulations humanoïdes et quadrupèdes à forte charge, le MagicLab P110 combine un couple de pointe de 360 N·m avec un retour d'information à double encodeur et une communication CAN/EtherCAT pour une action précise et réactive.
Related Collections




