Carte adaptateur DroneCAN Matek AP Periph CAN Node CAN-G474, STM32G474CE 512Ko, CANFD 5Mbit/s
Carte adaptateur DroneCAN Matek AP Periph CAN Node CAN-G474, STM32G474CE 512Ko, CANFD 5Mbit/s
MATEKSYS
Impossible de charger la disponibilité du service de retrait
Aperçu
Ce nœud AP Periph CAN, le Matek nœud AP Periph CAN CAN-G474, est un nœud adaptateur ArduPilot AP_Periph conçu pour ajouter des périphériques à un bus DroneCAN en utilisant un transceiver CAN de 5 Mbit/s et un MCU STM32G474. Il permet l'intégration de capteurs pris en charge par ArduPilot et de périphériques basés sur GPIO (tels que des sorties PWM et des modules de notification LED) via DroneCAN.
Caractéristiques clés
- Nœud d'adaptateur basé sur le firmware ArduPilot AP_Periph
- MCU STM32G474CE avec 512 Ko de Flash
- Matériel compatible CANFD avec support CAN/CANFD de 1 Mbit à 5 Mbit
- 2x bus CAN
- 4x UART pour GNSS, télémètre, proximité, EFI, entrée RC (récepteur) ; MSP activé sur TX3 par défaut pour GNSS, boussole, baromètre via MSP
- 2x bus I2C pour périphériques I2C (capteur de vitesse, baromètre, boussole)
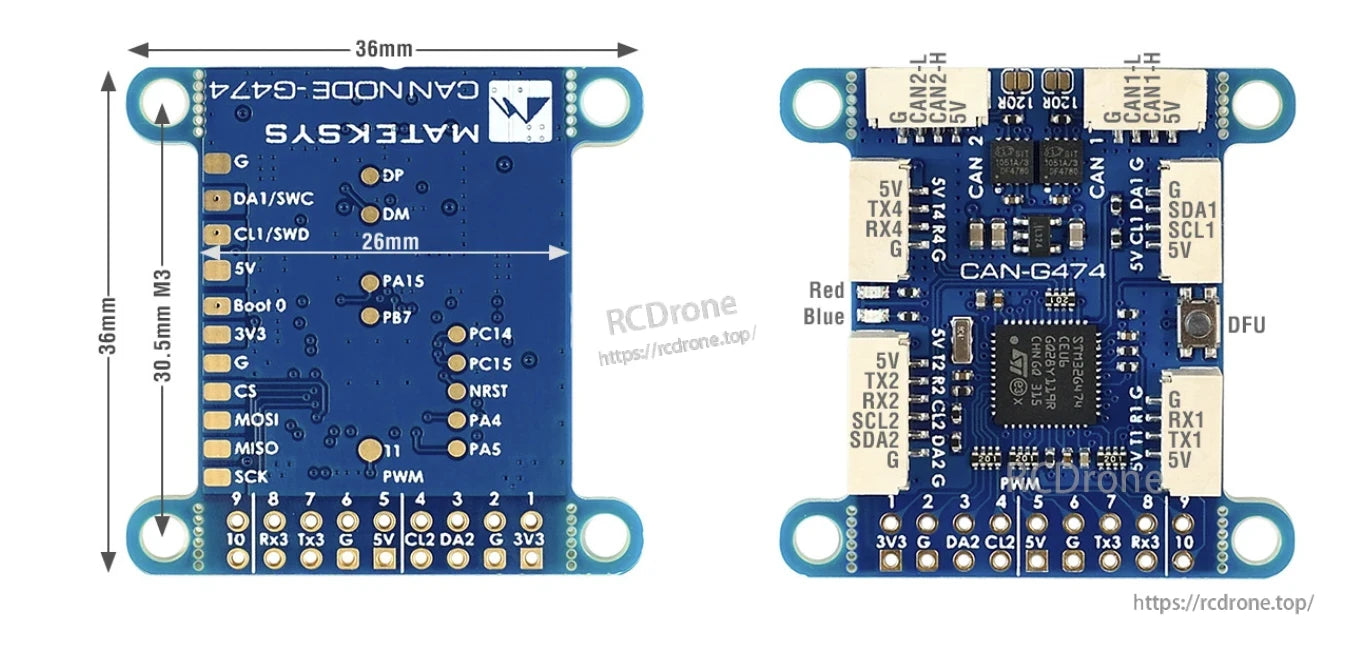
- 1x SPI pour RM3100 (pads SPI sur le côté inférieur avec impression en soie “CS, MOSI, MISO, SCK”)
- 11x sorties PWM pour servos et ESC ; tous les PWM supportent DMA/DShot (PWM1-10 sur DuPont 2.54mm trous ; pad PWM11 sur le côté inférieur avec impression en soie "11"
- Support de mise à jour du firmware via l'outil DroneCAN GUI / Mission Planner (onglet DroneCAN) et via le mode DFU de STM32CubeProgrammer (UART1)
Spécifications
| MCU | STM32G474CE |
| Flash | 512Ko |
| Débit de données du transceiver CAN | Jusqu'à 5Mbit/s |
| Support CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Bus CAN | 2x |
| UART | 4x (MSP activé sur TX3 par défaut) |
| I2C | 2x |
| SPI | 1x (pour RM3100) |
| Sorties PWM | 11x (PWM1-10 sur DuPont 2.54mm trous ; pad PWM11 sur le côté inférieur) |
| Débogage | Débogage ST, SWC & SWD (sur le côté inférieur) |
| Mise à jour du firmware (DFU) | UART1 (TX1, RX1) |
| Indicateurs LED | Clignotement rapide bleu : Démarrage ; Clignotement lent bleu : communication avec le contrôleur de vol ; Rouge : indicateur 3.3V |
| Plage de tension d'entrée | 4.5~5.5V @pad/pin 5V& |
| Consommation d'énergie | 62mA |
| Températures de fonctionnement | -30~85 °C |
| Connecteurs | 5x JST-GH-4P (SM04B-GHS-TB) pour CAN1, CAN2, I2C1, UART1, UART4 ; 1x JST-GH-6P (SM06B-GHS-TB) pour UART3+I2C2 |
| Trous traversants | 18x DuPont 2.54mm trous |
| Taille de la planche | 36mm*36mm*6mm |
| Poids | 5.2g |
| Montage | 30.5mm 4x Dia.3mm |
Ce qui est inclus
- 1x carte CAN-G474
- 2x fil en silicone JST-GH-4P à JST-GH-4P de 20 cm
- 1x fil en silicone JST-GH-6P à JST-GH-6P de 20 cm
Service client : https://rcdrone.top/ ou [email protected]
Applications
- Convertir les périphériques pris en charge par ArduPilot en périphériques de bus DroneCAN (GNSS, Compas, Baromètre, Capteur de vitesse, Télémètre, Capteur de proximité, Injecteurs de carburant électroniques)
- Périphériques basés sur GPIO sur DroneCAN, y compris les modules de notification PWM et LED
- Exemples de connexions de périphériques montrés : Télémètre, GPS & Compas, Capteur de vitesse, ENTRÉE RC, MONITEUR DE BATTERIE I2C
- Option de redondance : connecter soit un bus CAN au contrôleur de vol, soit connecter les deux
Manuels
- Téléchargements de firmware (ArduPilot AP_Periph) : https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Périph (pour capteurs périphériques)
- MatekG474-DShot (pour sortie DroneCAN-PWM)
- Méthodes de mise à jour
- Outil GUI DroneCAN ou Mission Planner – Onglet DroneCAN, charger “AP_Periph.bin”
- Mode DFU STM32CubeProgrammer : connecter le module USB-TTL à UART1, brancher USB tout en maintenant le bouton DFU enfoncé, charger “AP_Periph_with_bl.hex”
- Fichier 3D : CAN-G474_STEP.zip
- Tutoriel : Utilisation des adaptateurs MatekL431 pour PWM et DShot
Détails
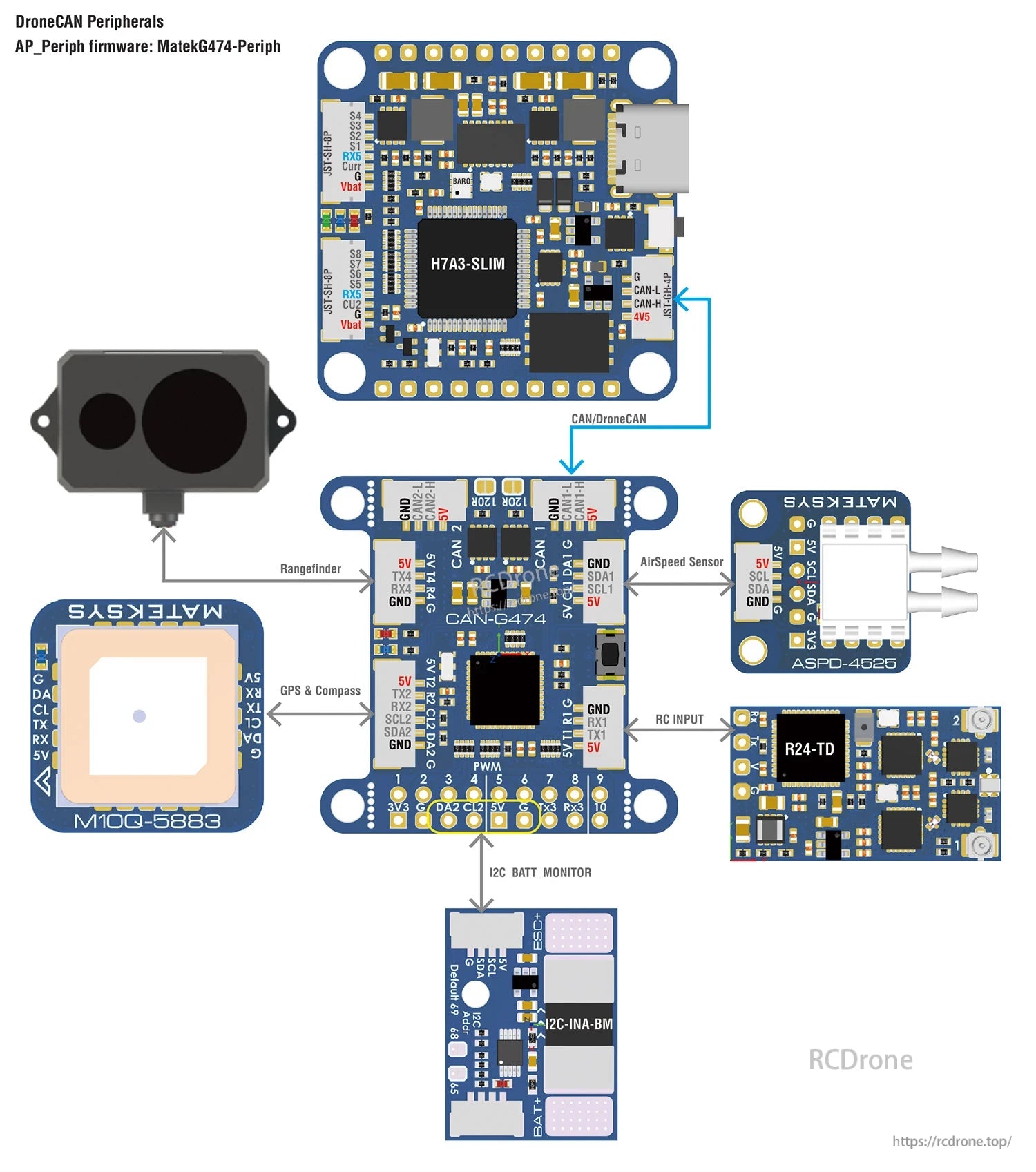
La carte Matek CAN-G474 fournit un port DroneCAN/CAN ainsi que des pads UART, I2C et PWM pour connecter des périphériques d'autopilote courants.La carte Matek CAN-G474 se connecte à un bus CAN/DroneCAN et décompose jusqu'à 10 sorties PWM pour servos ou ESC.
Related Collections