MATEK CAN-L4-BM - MONITEUR DE PUISSANCE NUMÉRIQUE Mateksys AP_PERIPH CAN
MATEK CAN-L4-BM - MONITEUR DE PUISSANCE NUMÉRIQUE Mateksys AP_PERIPH CAN
MATEKSYS
Impossible de charger la disponibilité du service de retrait
MATEK CAN-L4-BM - SPÉCIFICATIONS DU MONITEUR DE PUISSANCE NUMÉRIQUE Mateksys AP_PERIPH CAN
Utilisation : Véhicules et jouets télécommandés
Âge recommandé : 12+a, 14+a
Origine : Chine continentale
Matériau : Matériau composite
Nom de la marque : MATEKSYS
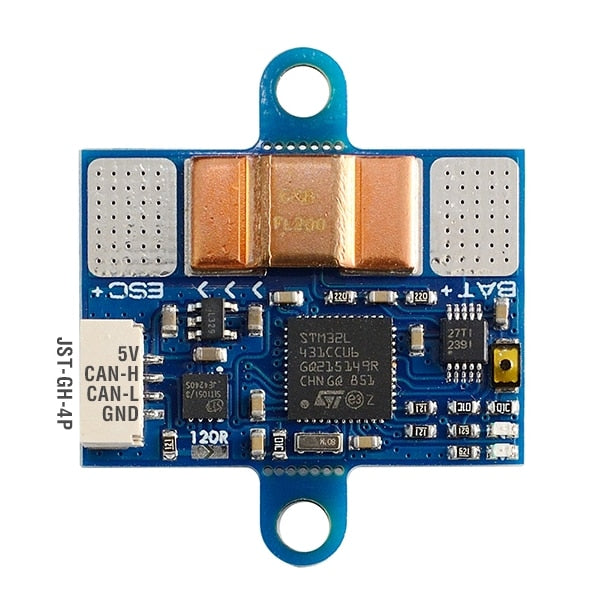
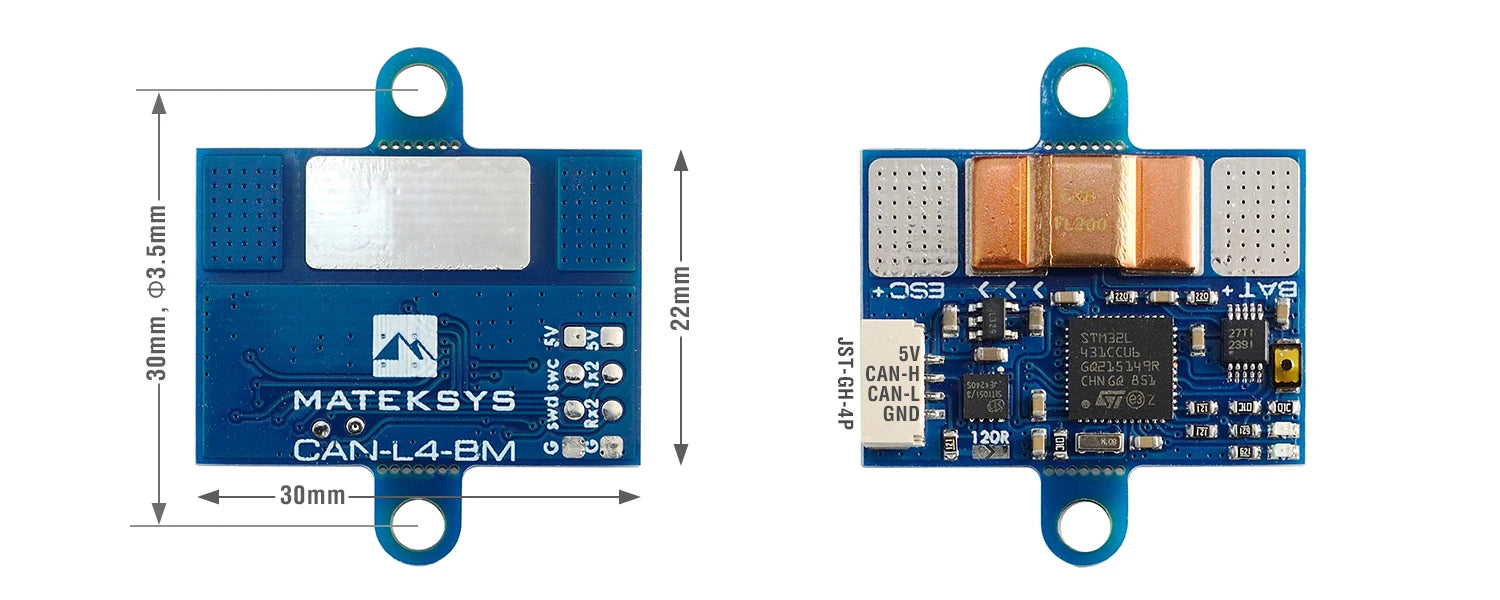
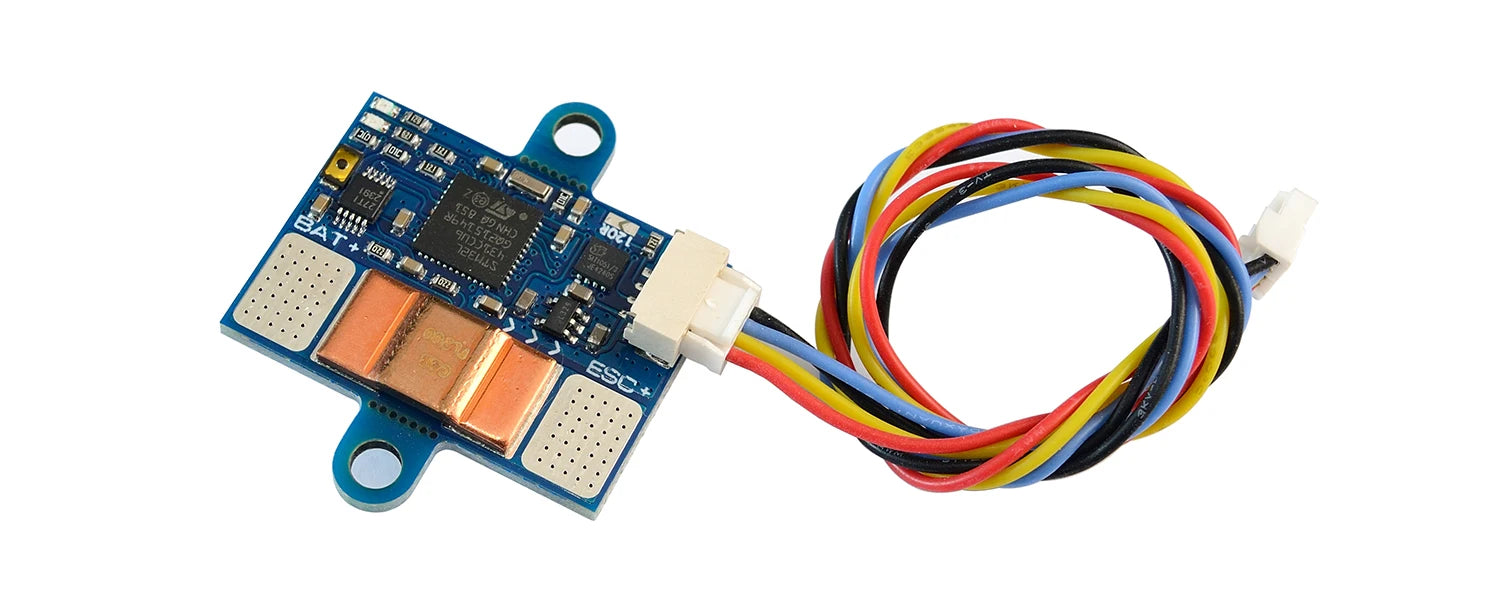
MONITEUR D'ALIMENTATION NUMÉRIQUE CAN AP_PERIPH, CAN-L4-BM
Courant 0~204,8A, tension 0~85V, protocole CAN/DroneCAN
-
CAN-L4-BM est un moniteur de puissance numérique ultra-précis basé sur le micrologiciel TI INA239 et ArudPilot AP_Periph.
-
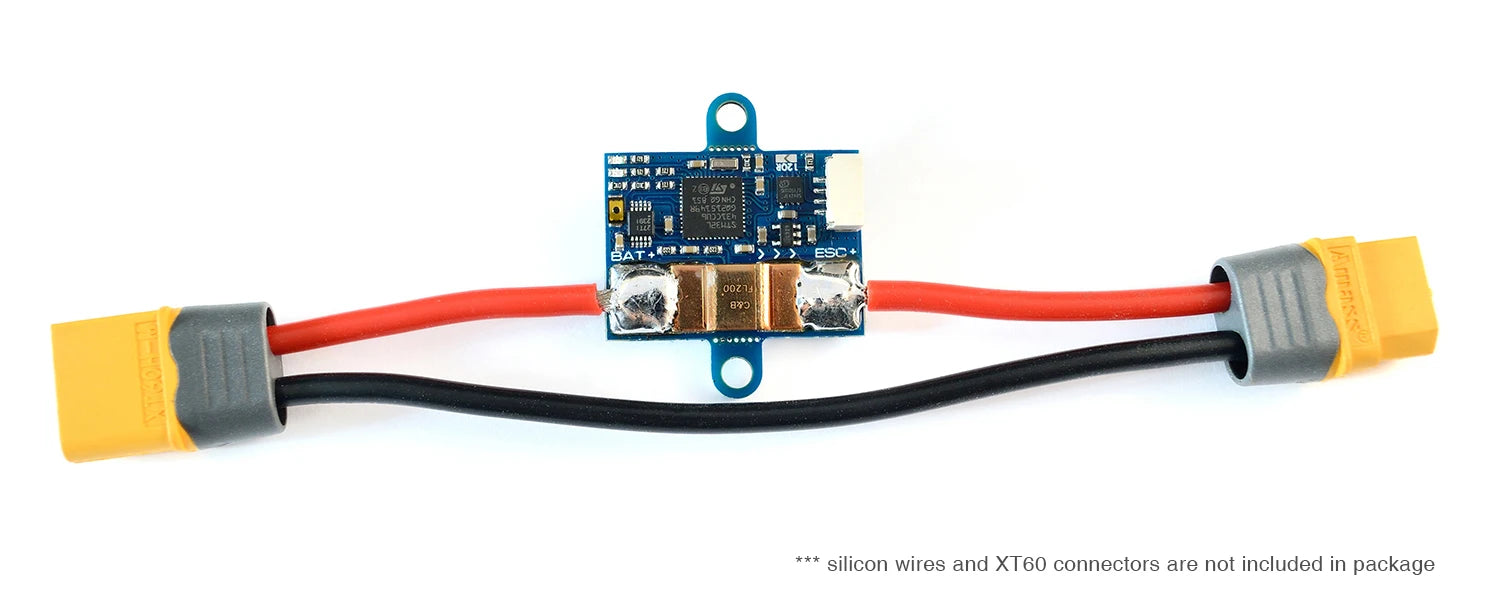
La résistance de ce chemin conducteur est typique de 200 μΩ, offrant une faible perte de puissance dans l'application.
-
Avec cet appareil, aucun étalonnage requis, les contrôleurs de vol prenant en charge le protocole DroneCAN peuvent facilement obtenir des lectures précises du courant et de la tension du bus via le bus CAN.
Spécifications
-
MCU : STM32L431xC, mémoire Flash de 256 Ko
-
CI de surveillance de puissance haute précision INA239, 85 V, 16 bits, avec interface SPI
-
Entrée de détection de tension de batterie : 0 ~ 85 V
-
Plage de détection de courant : 0 ~ 204,8 A
-
Courant de charge sur la résistance de détection de courant : 150 A (continu), 204,8 A (rafale)
-
Précision de tension : ± 0,1 %
-
Précision du courant : ± 2 %
-
Interface
-
CAN, protocole DroneCAN
-
UART2, de rechange, DFU
-
Débogage ST, SWCLK et SWDIO
-
-
LED
-
Bleu, clignotement rapide, démarrage
-
Bleu, clignotement lent, fonctionne
-
Indicateur rouge, 3,3 V
-
Alimentation pour carte CAN-L4-BM : 4,5~5,5 V @5V pad/pin
-
Consommation électrique : 10 mA
-
Températures de fonctionnement : -40 à 85 °C
-
Physique
-
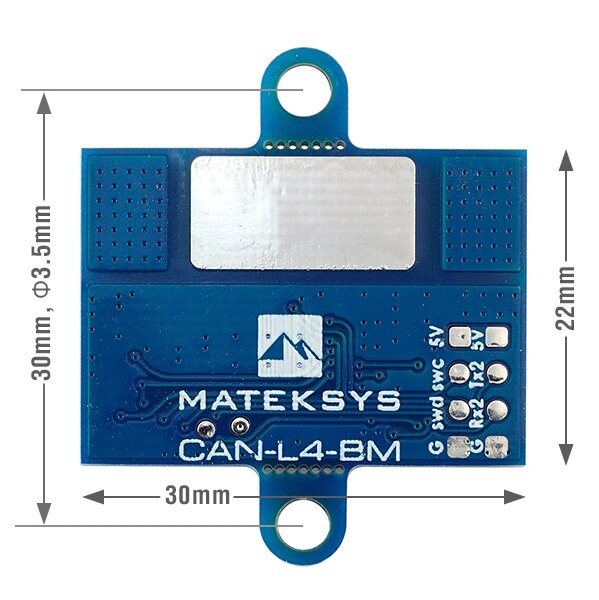
Taille de la carte : 30 mm*22 mm*3 mm. 4g
-
Fichier 3D : CAN-L4-BM_STEP.zip
-
-
Micrologiciel
-
ArduPilot AP_Periph MatekL431-BattMon
-
Mise à jour via l'outil GUI DroneCAN
-
-
Paramètres
-
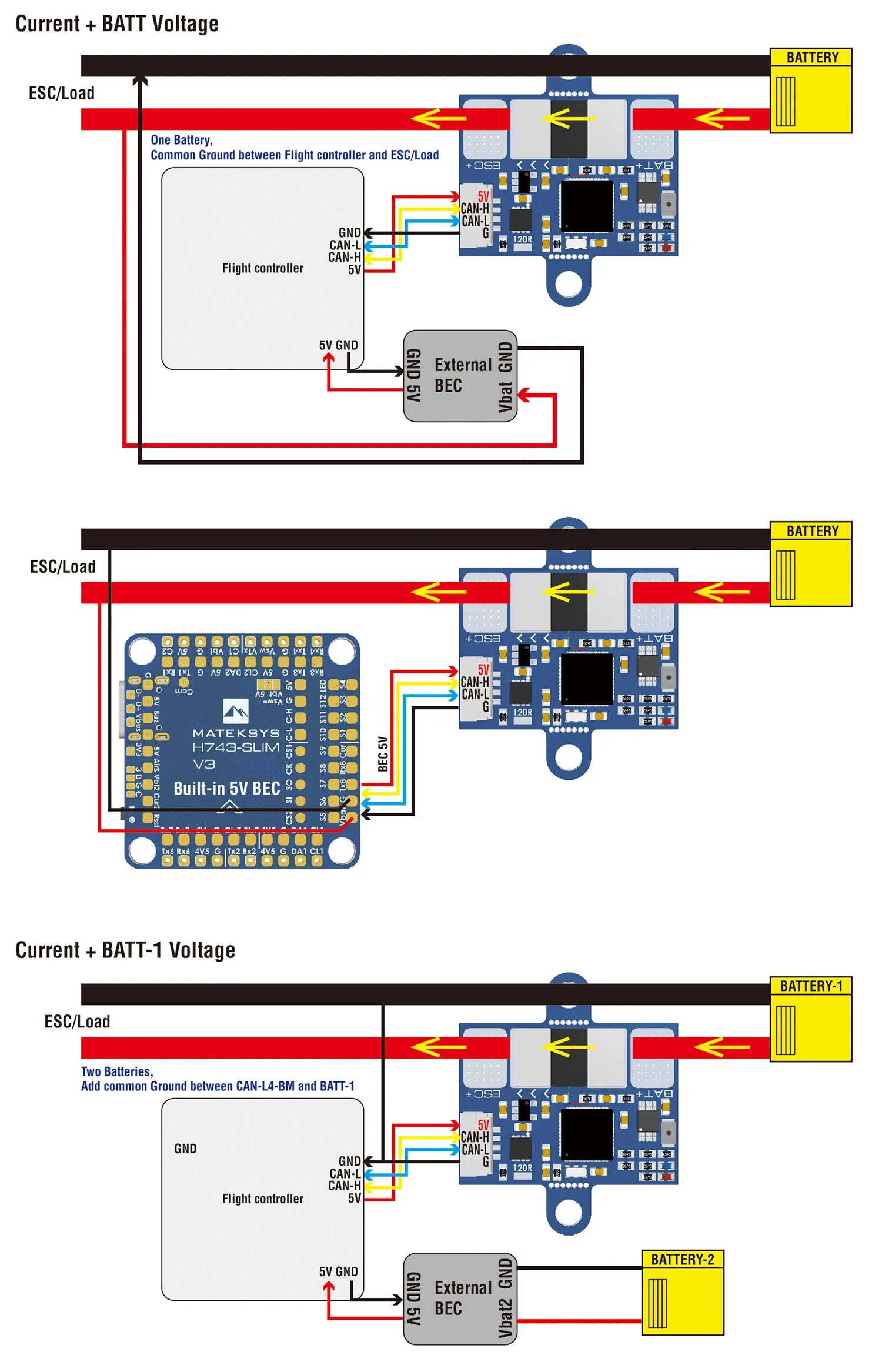
CAN_P1_DRIVER = 1 s'il est connecté au port CAN bus1 ou CAN_P2_DRIVER = 1 s'il est connecté au port CAN bus2
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Emballage
-
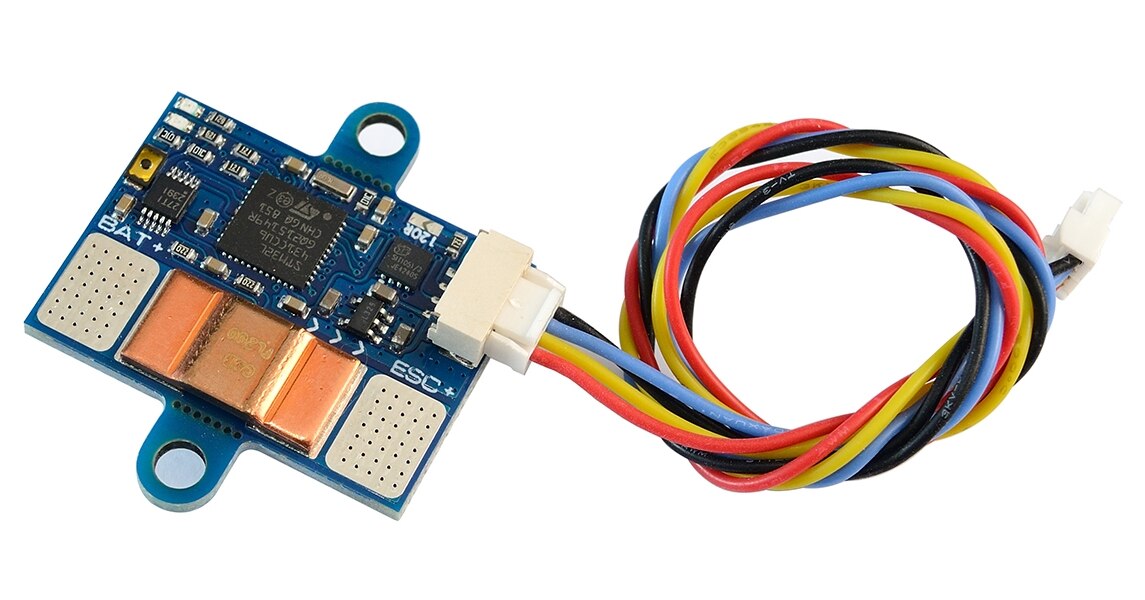
1x carte CAN-L4-BM
-
1x fil de silicium JST-GH-4P à JST-GH-4P 20 cm
Conseils
-
Le gros tampon en bas est un tampon mort. Aucun réseau de circuits dessus.
-
Soudez les fils positifs aussi près que possible des deux côtés de la résistance de détection de courant.
-
2 oreilles pour le montage peuvent être coupées si vous n'en avez pas besoin.
-
Si les fils CAN sont trop longs, pontez le cavalier « 120R ».
Related Collections