MATEK Mateksys AP_PERIPH CAN NODE L431
MATEK Mateksys AP_PERIPH CAN NODE L431
MATEKSYS
Impossible de charger la disponibilité du service de retrait
MATEK Mateksys AP_PERIPH CAN NODE L431 SPÉCIFICATIONS
Utilisation : Véhicules et jouets télécommandés
Âge recommandé : 12+ans,14+ans,3-6ans,6-12ans,0-3ans
Origine : Chine continentale
Matériau : Matériau composite
Nom de la marque : MATEKSYS
AP_PERIPH NŒUD CAN L431
AP_Periph, nœud CAN, DroneCAN, L431


-
CAN-L431 est un nœud adaptateur basé sur le micrologiciel ArudPilot AP_Periph.
-
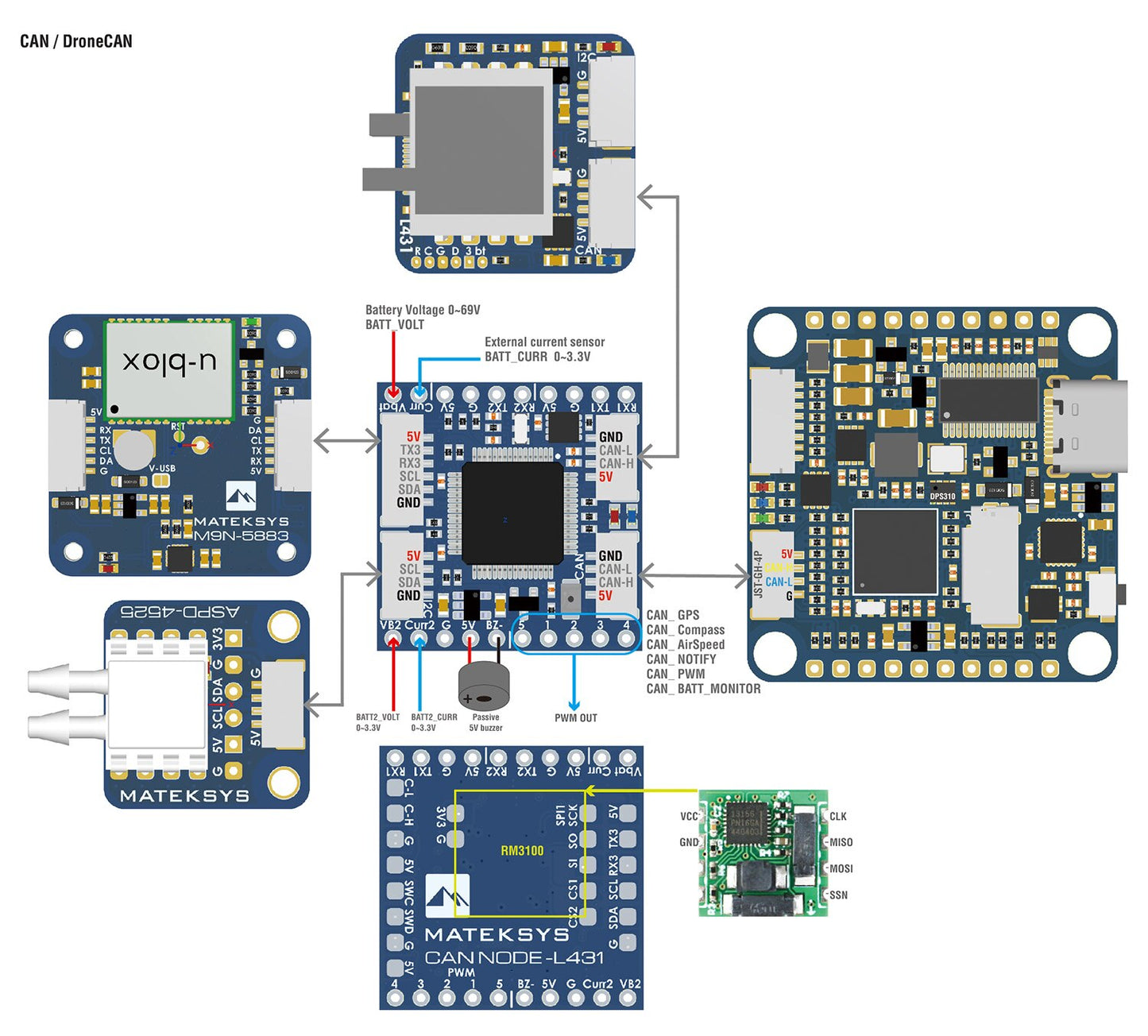
Avec cette carte, vous pouvez facilement utiliser la bibliothèque de pilotes ArduPilot pour convertir les périphériques GNSS, boussole, baromètre, capteur de vitesse et GPIO pris en charge par ArduPilot (PWM, notification Buzzer/LED) en périphériques de bus DroneCAN.
Spécifications
-
MCU : STM32L431xC, mémoire Flash de 256 Ko
-
Débits de données de l'émetteur-récepteur CAN jusqu'à 5 Mbit/s en phase rapide CAN FD
-
1x CAN, protocole DroneCAN (2x connecteurs GH-4P en parallèle)
-
3x UART
-
UART1, de rechange
-
UART2, MSP par défaut, DFU
-
UART3, GPS par défaut
-
-
1x I2C
-
pour capteur de vitesse périphérique
-
pour baromètre périphérique
-
pour périphérique Compass QMC5883L
-
-
1x SPI
-
pour périphérique RM3100
-
-
4x CAN
-
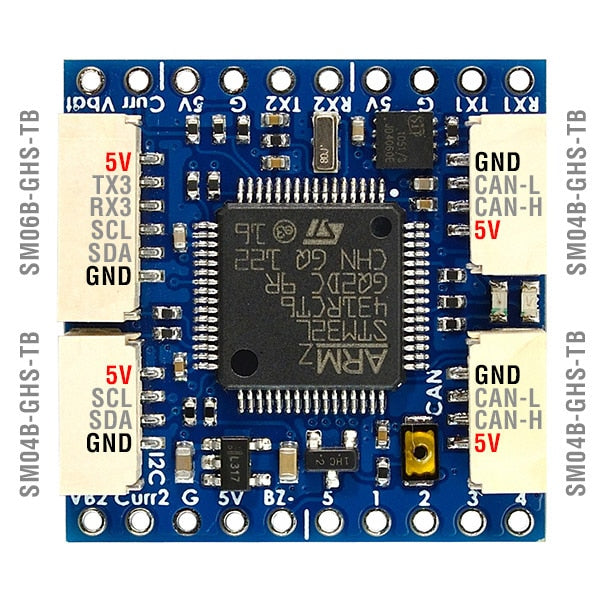
BATT_VOLT, BROCHE 5
-
BATT_CURR, broche 6
-
BATT2_VOLT, BROCHE 15
-
BATT2_CURR, broche 16
-
-
5x sorties PWM
-
1x GPIO avec TIM16 pour buzzer
-
Débogage ST, SWCLK et SWDIO
-
LED
-
Bleu, clignotement rapide, démarrage
-
Bleu, clignotement lent, fonctionne
-
Indicateur rouge, 3,3 V
-
Plage de tension d'entrée : 4,5 ~ 5,5 V @ pastille/broche de 5 V
-
Consommation électrique : 40 mA
-
Températures de fonctionnement
-
Physique
-
2x JST-GH-4P(SM04B-GHS-TB) pour CAN
-
1x JST-GH-4P(SM04B-GHS-TB) pour I2C
-
1x JST-GH-6P(SM06B-GHS-TB) pour UART3+I2C
-
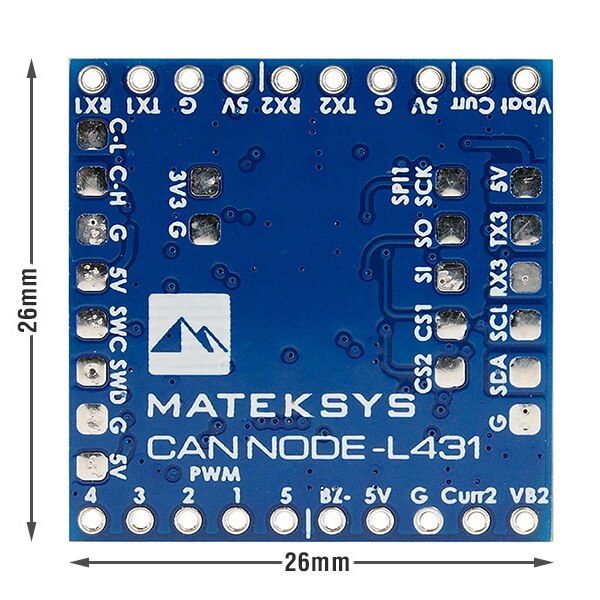
Taille de la carte : 26 mm*26 mm*6 mm. 3,7g
-
Fichier 3D : CAN-L431_STEP.zip
-
-
Micrologiciel
-
ArduPilot AP_Periph MatekL431-Periph ou MatekL431-Airspeed
-
Mise à jour via l'outil GUI DroneCAN
-
Emballage
-
1x carte CAN-L431
-
1x fil de silicium JST-GH-4P à JST-GH-4P 20 cm
-
1x fil de silicium JST-GH-6P à JST-GH-6P 20 cm
Conseils
-
Le firmware MatekL431-Periph prend en charge la boussole I2C QMC5883L par défaut
-
Si vous connectez une autre boussole I2C à cette carte, vous devez la mettre à jour avec ce firmware via l'interface graphique DroneCAN ou le mode SLCAN dans Mission Planner.
-
Related Collections