Module GPS MATEK M10-L4-3100-Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Module GPS MATEK M10-L4-3100-Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Impossible de charger la disponibilité du service de retrait
MATEK M10-L4-3100 - SPÉCIFICATIONS GNSS Mateksys AP_PERIPH
Utilisation : Véhicules et jouets télécommandés
Âge recommandé : 12+a,14+a,6-12ans
Origine : Chine continentale
Matériau : Matériau composite
Nom de la marque : MATEKSYS
AP_PERIPH GNSS M10-L4-3100
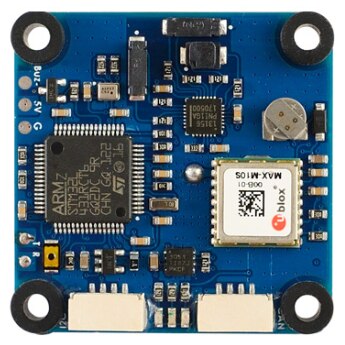
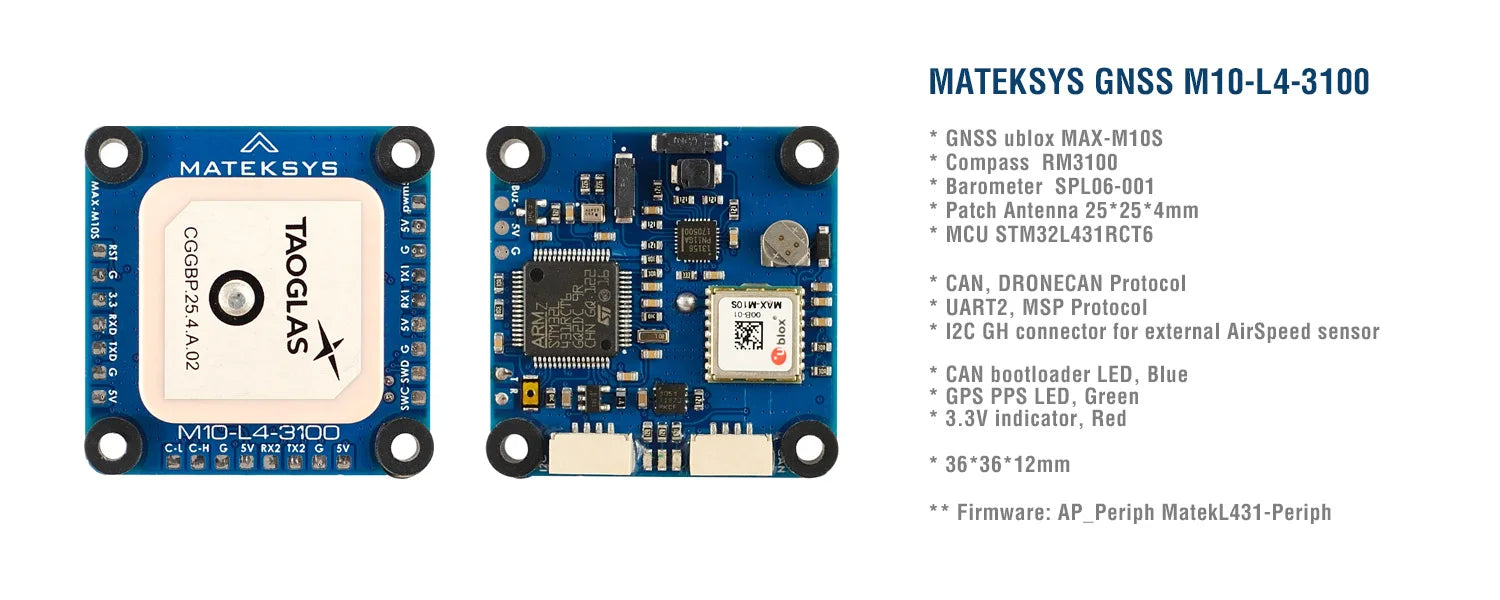
Nœud CAN AP_Periph L431, MAX-M10S, RM3100, SPL06-001, protocole DroneCAN et UART_MSP
-
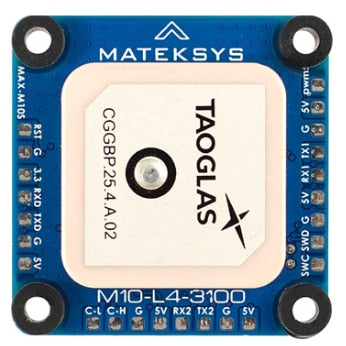
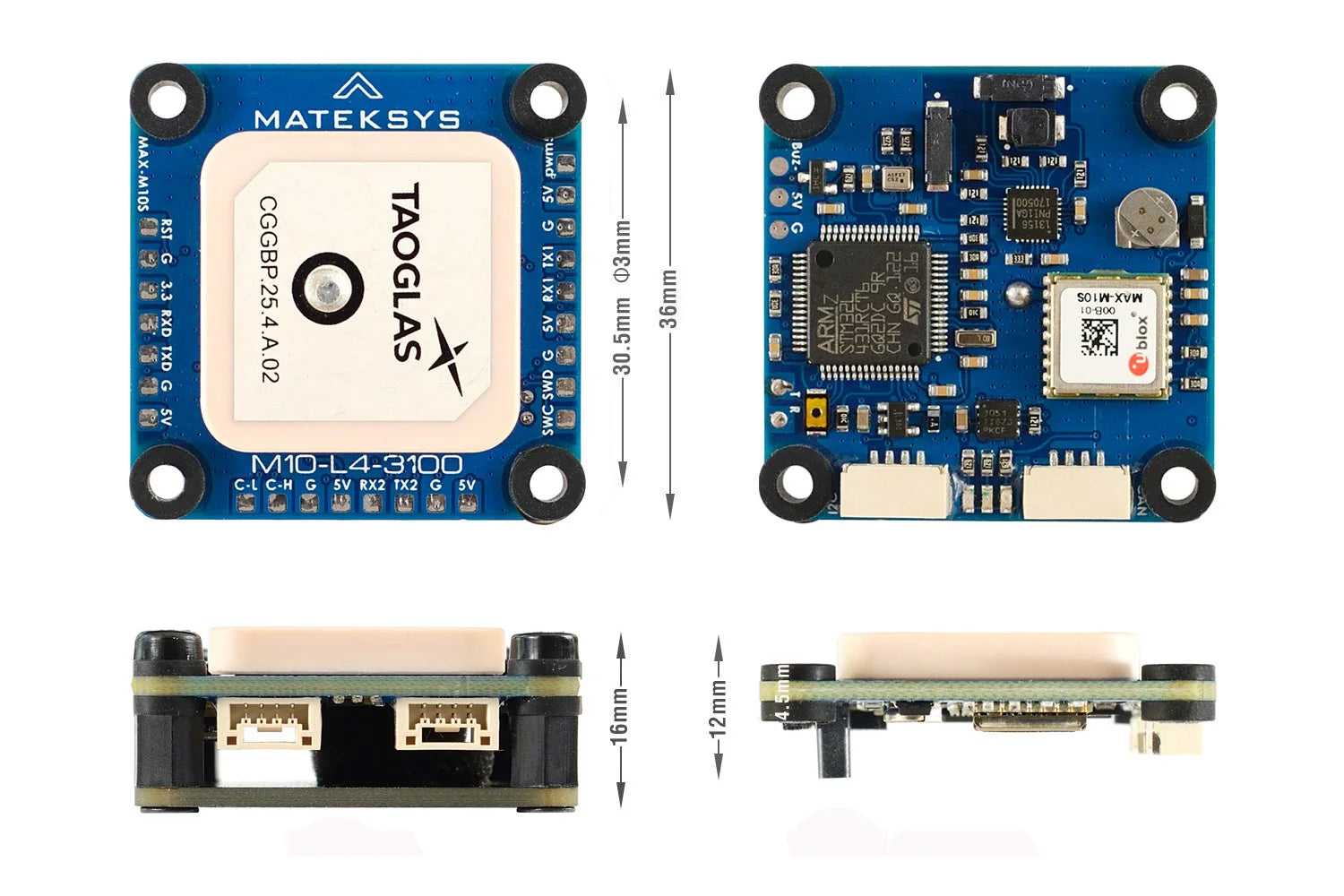
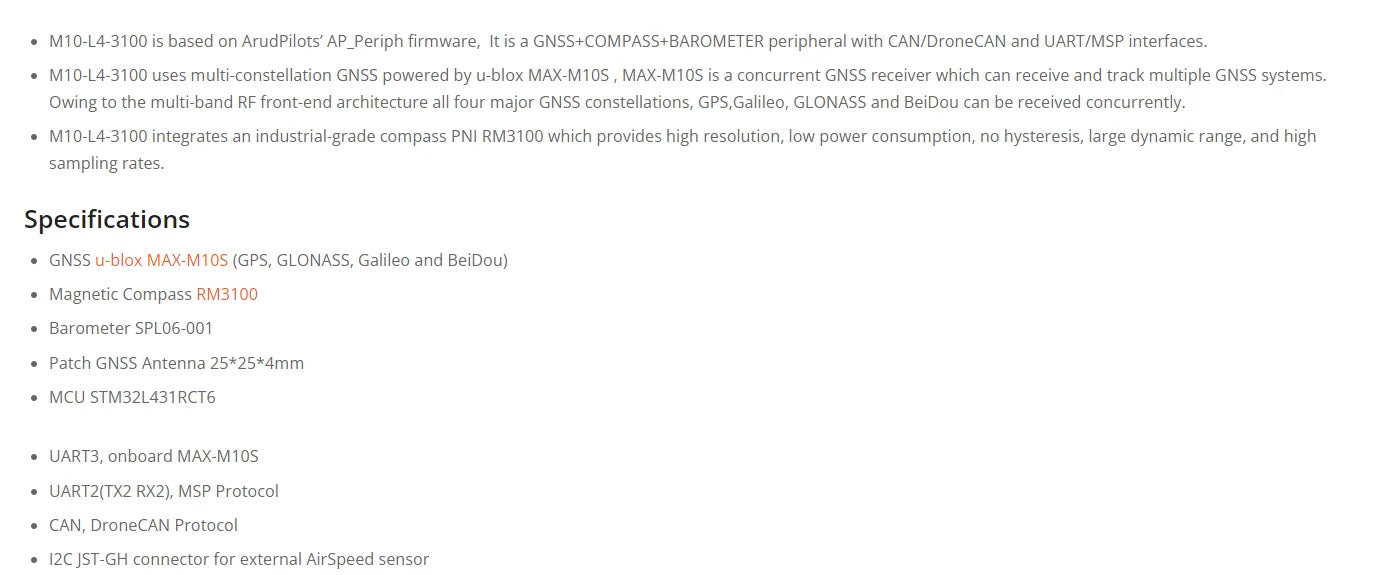
M10-L4-3100 est basé sur le micrologiciel AP_Periph d'ArudPilots. Il s'agit d'un périphérique GNSS+COMPASS+BAROMETER avec des interfaces CAN/DroneCAN et UART/MSP.
-
M10-L4-3100 utilise un GNSS multi-constellation alimenté par u-blox MAX-M10S, MAX-M10S est un récepteur GNSS simultané qui peut recevoir et suivre plusieurs systèmes GNSS. Grâce à l'architecture frontale RF multibande, les quatre principales constellations GNSS, GPS, Galileo, GLONASS et BeiDou, peuvent être reçues simultanément.
-
M10-L4-3100 intègre une boussole de qualité industrielle PNI RM3100 qui offre une haute résolution, une faible consommation d'énergie, aucune hystérésis, une large plage dynamique et des taux d'échantillonnage élevés.

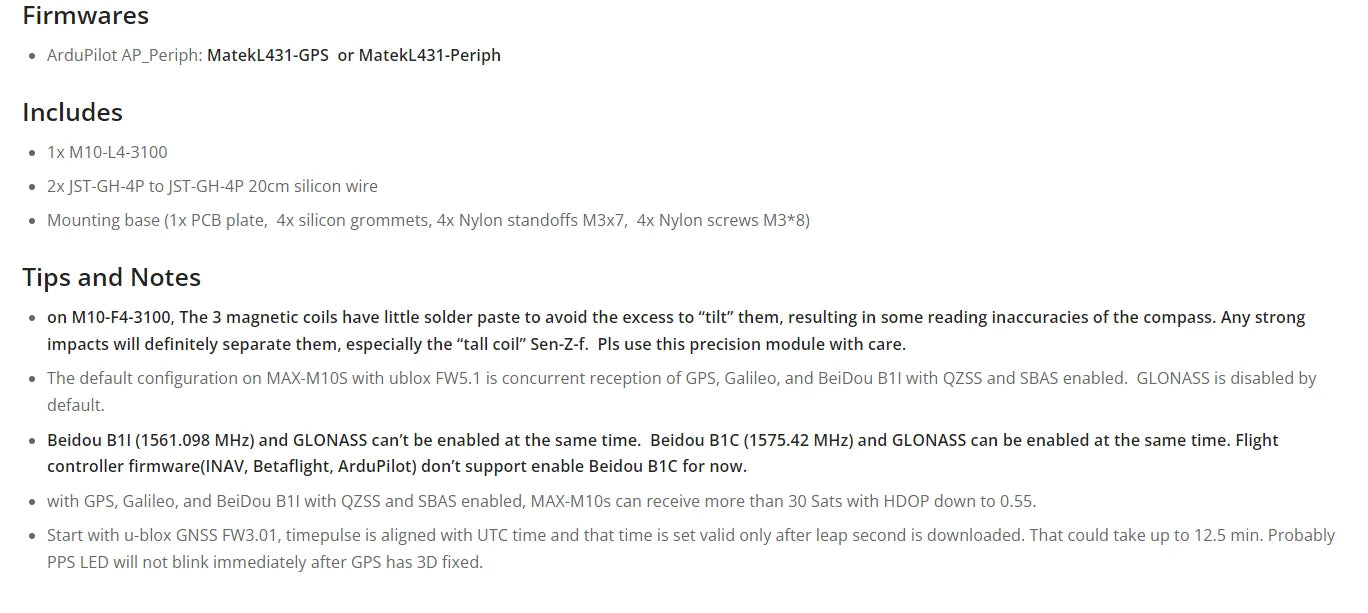
la configuration par défaut sur MAX-M1OS avec ublox FWS . est la réception simultanée du GPS, de Galileo et de BeiDou BI avec QZSS et SBAS activés. GLONASS est désactivé par défaut Beidou B1I (1575,42 MHz) et ne peut pas être activé en même temps.
Connexion CAN (protocole UAVCAN)
-
M10-L4-3100 5V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN Élevé
-
M10-L4-3100 CAN-L — FC CAN bas
-
M10-L4-3100 G — FC G/GND
Paramètres FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (assurez-vous que DroneCAN n'est pas coché)
————————————————————————–
Si vous connectez le capteur de vitesse I2C au port I2C du M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Et vous devez définir les paramètres du nœud CAN pour le capteur de vitesse connecté au port I2C du M10-L4-3100
Planificateur de mission > Configuration initiale > Matériel en option > UAVCAN > Mode SLCan CAN1 > Paramètres
-
MS4525 ARSP_TYPE -> 1 (par défaut dans hwdef)
-
MS5525 ARSP_TYPE -> 3 prend en charge MS5525 avec l'adresse 0x77 uniquement
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Écrire et redémarrer
————————————————————————–
Si vous connectez 2812LED DIN au pad PWM5
-
NTF_LED_TYPES -> (assurez-vous que DroneCAN est coché)
Mode SLCan CAN1 > Paramètres
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw doit être La fonctionnalité MSP est désactivée dans « MatekL431-GPS »
Connexion UART (protocole MSP)
-
M10-L4-3100 5 V — FC 4,0 V ~ 5,3 V
-
M10-L4-3100 TX2 — FC de rechange UART_RX
-
M10-L4-3100 RX2 – FC de rechange UART_TX (non essentiel)
-
M10-L4-3100 G — FC G/GND
ArduPilot (depuis 4.1.x) Paramètres FC
-
Serialx_PROTOCOL = 32 (MSP) où x est le port SERIAL utilisé pour la connexion sur le pilote automatique.
-
Serialx_BAUD = 115 où x est le port SÉRIE utilisé pour la connexion sur le pilote automatique.
-
TYPE GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4 096 (MSP Baro)
-
BARO_PRIMARY = 1 (Si vous souhaitez utiliser le baro MSP comme baro principal, sinon laissez la valeur par défaut)
-
COMPASS_TYPEMASK 0 (ou assurez-vous que le bit MSP n'est pas coché)
INAV (depuis 2.6) Paramètres FC
-
M10-L4-3100 est compatible avec n'importe quel contrôleur de vol pris en charge par INAV sur un UART de rechange.
-
Dans l'onglet Ports, activez MSP sur l'UART correspondant auquel le M10-L4-3100 est connecté, N'activez PAS « GPS » sur cet UART. sélectionnez Baudrate 115200.
-
fonctionnalité GPS
-
définir gps_provider = MSP
-
set mag_hardware = MSP
-
définir baro_hardware = MSP
-
set align_mag = CW90, si la boussole est montée à plat avec la flèche tournée vers l'avant et que la flèche du contrôleur de vol est également tournée vers l'avant.
Related Collections