


Contrôleur de vol MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Contrôleur de vol MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Impossible de charger la disponibilité du service de retrait
Caractéristiques
- Affichage à l'écran
- Montage 30x30
- Design compact
- Connectivité
- Léger
Spécifications
Spécifications
- MCU : STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU : ICM42688P
- Baro : SPL06-001
- OSD : AT7456E
- Blackbox : 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) avec inversion intégrée.
- 11x sorties PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Courant, VB2, Cur2)
- 3x LEDs pour l'état FC (Bleu, Rouge) et indicateur 3.3V (Rouge)
- USB Type-C (USB2.0)
- 8 sorties PWM sur 2 connecteurs JST-SH1.0_8 broches pour 2 ESC 4 en 1
- 1 connecteur JST-GH1.25_4 broches (5V/CAN-H/CAN-L/G)
- Interrupteur ON/OFF de sortie 9V
- La vidéo numérique OSD est prise en charge par n'importe quel UART disponible
Alimentation
- Entrée Vbat : 6~36V (2~8S LiPo)
- BEC : 5V 2A cont. (Max.3A)
- BEC : 9V 2A cont. (Max.3A)
- LDO 3.3V : Max.200mA
- Pas de capteur de courant intégré
- Le pad ADC VB2 supporte Max. 69V (diviseur de tension : 1K:20K)
Firmware FC
- ArduPilot : MATEKH7A3 (4.6 ou plus récent)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flasher avec STM32CubeProgrammer
Physique
- Montage : 30,5 x 30,5 mm, Φ4 mm avec des joints Φ3 mm
- Dimensions : 36 x 36 x 5 mm
- Poids : 7 g
- Étape 3D H7A3-SLIM_step.zip
Y compris
- 1x H7A3-SLIM
- 6x Joints en silicone M4 à M3
- 2x JST-SH1.0_8pin câble, 5cm, & connecteurs 8pin
- 1x câble JST-GH-4P à JST-GH-4P pour port CAN, 20cm
Détails

Le contrôleur de vol MATEKSYS H7A3-SLIM utilise un MCU STM32H7A3 avec IMU ICM42688P et un port USB-C dans un motif de montage de 30,5 mm.

Le contrôleur de vol MATEKSYS H7A3-SLIM utilise un agencement compact de 30x30 avec un port USB-C et des pads clairement étiquetés pour un câblage soigné.

Le MATEKSYS H7A3-SLIM utilise des connecteurs JST-SH 1.0 à 8 broches doubles plus un port JST-GH à 4 broches et USB Type-C pour un câblage soigné et une configuration facile.

Le MATEKSYS H7A3-SLIM utilise des pads de soudure et des ports clairement étiquetés pour les connexions vidéo caméra/VTx, UARTs, CAN et alimentation.
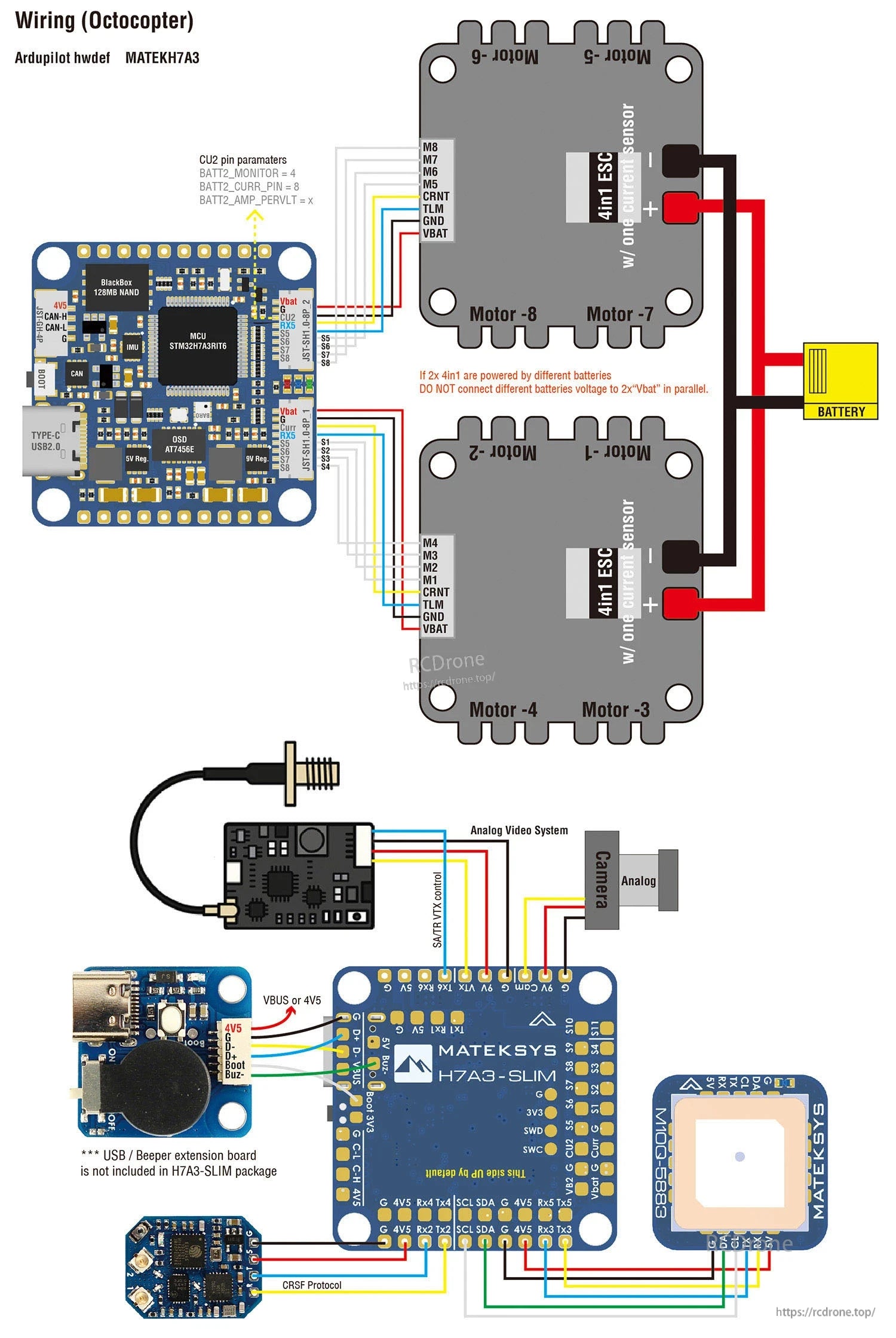
MATEKSYS H7A3-SLIM utilise des pads clairement étiquetés pour connecter des ESCs 4-en-1 doubles, l'alimentation VBAT, le GPS, le récepteur et les composants vidéo analogiques.

Cartographie ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O tolérant 5 V | TIM1_CH2 | DMA/Bi-DShot | Groupe1 |
| S2 | PWM2 GPIO51 | I/O tolérant 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O tolérant 5 V | TIM2_CH1 | DMA/Bi-DShot | Groupe2 | |
| S4 | PWM4 GPIO53 | I/O tolérant 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O tolérant 5 V | TIM3_CH3 | DMA/Bi-DShot | Groupe3 | |
| S6 | PWM6 GPIO55 | I/O tolérant 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O tolérant 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O tolérant 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O tolérant 5 V | TIM4_CH1 | DMA/DShot | Groupe4 | |
| S10 | PWM10 GPIO59 | I/O tolérant 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolérant I/O | TIM16_CH1 | DMA/DShot | Groupe5 | |
| PWM1~PWM11 sont capables de Dshot et PWM.Cependant, le mélange de Dshot et de l'opération PWM normale pour les sorties est restreint à des groupes, c'est-à-dire que l'activation de Dshot pour une sortie dans un groupe nécessite que TOUTES les sorties de ce groupe soient configurées et utilisées comme Dshot, plutôt que comme sorties PWM. Si un servo et un moteur sont mélangés dans le même groupe, assurez-vous que ce groupe fonctionne à la fréquence PWM la plus basse selon la spécification du servo. C'est-à-dire. Si le servo supporte un maximum de 50Hz, l'ESC doit fonctionner à 50Hz dans ce groupe. |
||||||
| PINIO | Interrupteur 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Pad Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Pad de courant | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | E/S tolérant 5V | sur la carte Baro SPL06-001 | Adresse | 0x76 |
| Vitesse de l'air numérique I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnétomètre | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | E/S tolérant 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
PEUT GPS PEUT Boussole PEUT Capteur de vitesse aérienne |
TYPE_GPS MASQUE_TYPE_BOUSSOLE TYPE_ARSPD |
9 0 8 |
| UART | USB | USB | console | PROTOCOLE_SERIAL0 | 2 | |
| TX1 RX1 | USART1 w/DMA | I/O tolérant 5 V | Télémétrie | PROTOCOLE_SERIAL1 | 2 | |
| TX2 RX2 | USART2 w/DMA | I/O tolérant 5 V | Entrée RC/Récepteur | PROTOCOLE_SERIAL2 | 23 | |
| TX3 RX3 | USART3 w/DMA | I/O tolérant 5 V | GPS | PROTOCOL3_SÉRIE | 5 | |
| TX4 RX4 | UART4 sans DMA | E/S tolérant 5 V | Réserve | PROTOCOL4_SÉRIE | -1 | |
| TX5 RX5 | UART5 sans DMA | E/S tolérant 5 V | Réserve | PROTOCOL5_SÉRIE | -1 | |
| TX6 RX6 | USART6 sans DMA | E/S tolérant 5 V | Réserve | PROTOCOL6_SÉRIE | -1 | |
ENTRÉE RC
L'entrée RC est configurée sur l'USART2 (SÉRIE2).Il prend en charge tous les protocoles RC série. SERIAL2_PROTOCOL=23 par défaut.
- PPM n'est pas pris en charge.
- CRSF nécessite une connexion Tx2 & Rx2, et définissez SERIAL2_OPTIONS sur "0" (par défaut).
- SBUS/DSM/SRXL se connecte à la broche Rx2, mais SBUS nécessite que les SERIAL2_OPTIONS soient définies sur "3".
- FPort nécessite une connexion à Tx2, et définissez SERIAL2_OPTIONS sur "7". Si la télémétrie ne fonctionne pas, essayez de définir SERIAL7_OPTIONS = 135.
- SRXL2 nécessite une connexion à Tx2 et fournit automatiquement la télémétrie. Définissez SERIAL2_OPTIONS sur "4".
- Tout UART peut également être utilisé pour les connexions du système RC dans ArduPilot, et est compatible avec tous les protocoles sauf PPM. Voir Systèmes de contrôle radio pour plus de détails.
Relais ArduPilot (PINIO)
- Sortie 9V activée par défaut
- PC13 PINIO1 SORTIE GPIO(81) // alimentation 9V switche.g.
- FONCTION_RELAIS1 1
- PIN_RELAIS1 81 // PINIO1 GPIO
- OPTION_RC7 28 // Relais On/Off, Utilisez CH7 de l'émetteur pour régler 9V ON/OFF
La fonction configurée sera déclenchée lorsque la valeur pwm de l'interrupteur auxiliaire dépassera 1800. Elle sera désactivée lorsque la valeur tombera en dessous de 1200.
Vérifiez la valeur pwm envoyée par l'émetteur lorsque l'interrupteur est haut et bas en utilisant l'écran de Configuration Initiale >> Matériel Obligatoire >> Étalonnage Radio. S'il ne monte pas au-dessus de 1800 ou en dessous de 1200, il est préférable d'ajuster les points de fin de course du servo dans l'émetteur.
Related Collections


