




BetaFPV Matrix 1S Contrôleur de vol brushless AIO 3EN1/4EN1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Contrôleur de vol brushless AIO 3EN1/4EN1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Impossible de charger la disponibilité du service de retrait
Aperçu
Le BetaFPV Matrix 1S Contrôleur de Vol Brushless est une plateforme de contrôleur de vol 1S whoop proposée en deux versions : Matrix 1S 3IN1 (FC + ESC + récepteur ELRS 2.4GHz série intégré ; pas d'OSD analogique) et Matrix 1S 4IN1 (ajoute l'OSD Betaflight et des pads de soudure pour un VTX analogique externe). Il utilise le MCU STM32G473CEU6 et un agencement de carte de style croisé, et est conçu pour une installation simple sur des constructions micro 1S.
Caractéristiques Clés
- Deux architectures : 3IN1 pour des constructions numériques HD (avec port VTX numérique HD SH1.0-6Pin et prises de moteur) et 4IN1 pour des constructions analogiques (avec OSD et pads de soudure pour VTX analogique externe).
- MCU : STM32G473CEU6 (168MHz) ; déclaré comme 55 % plus rapide en traitement que le F411.
- Sortie ESC : 12A en continu, 18A en pic ; prend en charge DSHOT300 et DSHOT600.
- Nouveau BEC : 5V/3A ; conception d'alimentation LDO 3.3V indépendante de l'IMU.
- Récepteur ELRS 2.4GHz série intégré (V3.4.3), protocole CRSF.
- Note de durabilité : carte de 1 mm ; caractéristiques d'installation orientée sans soudure sur la version 3IN1.
Spécifications
Contrôleur de vol (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Gyro | ICM42688P |
| Taux d'échantillonnage max. du gyro (tableau comparatif) | ICM42688P, 8KHz |
| Mémoire Blackbox | 16MB (également affiché comme 16M) |
| Capteur | Tension & courant |
| BEC | 5V/3A |
| Alimentation IMU indépendante | 3.3V LDO (LDO indépendant de l'IMU) |
| ESC (intégré) | 12A continu |
| RX | Série ELRS 2.4GHz (V3.4.3) |
| Port USB | SH1.0-4Pin |
| Connecteur de batterie | BT2.0 |
| Prise moteur | JST1.25-3Pin (également indiqué comme JST1.25) |
| Taille de montage | 25.5mm x 25.5mm |
I/O spécifique à la version
| UART (3IN1) | UART 1 (RX uniquement/SBUS), UART 2 (Libre), UART 3 (Pour RX), UART 4 (Libre/HD MSP) |
| UART (4IN1) | UART 1 (Pour VTX), UART 2 (Libre), UART 3 (Pour RX), UART 4 (AUCUN) |
| OSD | AT7456E (version 4IN1 uniquement) |
| Port VTX numérique HD | SH1.0-6Pin (version 3IN1 uniquement) |
Poids
| 3IN1 | 3.8±0.1g (connecteur de batterie exclu); 4.2±0.1g (connecteur de batterie inclus) |
| 4IN1 | 3.6±0.1g (connecteur de batterie exclu); 4.6±0.1g (connecteur de batterie inclus) |
ESC
| Entrée de puissance | 1S seulement |
| Courant | 12A continu, 18A pic |
| Protocole de signal numérique | DSHOT300, DSHOT600 |
| Firmware ESC | A_X_5_96_v0.19.2.hex pour le firmware BB51 Bluejay |
Tableau de comparaison (tel que fourni)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Fréquence MCU | 168MHz | 108MHz | |
| Gyro, taux d'échantillonnage max. | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A continu | 1S, 5A | |
| Mémoire Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD : AT7456E | |
| RX | ELRS 2.4GHz série embarquée | ||
| Connecteur moteur | JST1.25 | ||
| Poids | 3.8g | 3.6g | 3.64g |
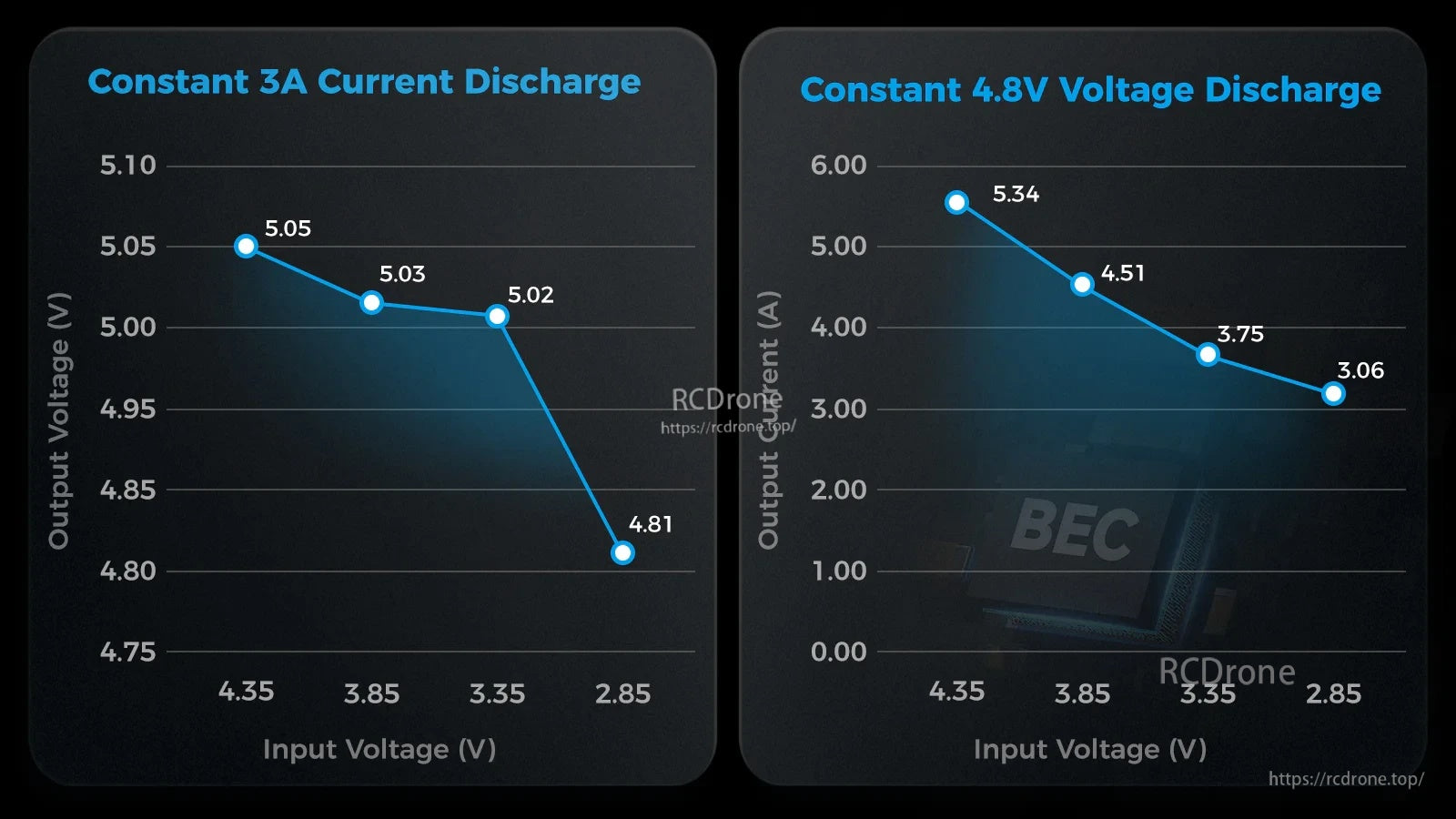
Données de test BEC (comme indiqué)
- Décharge de courant constant de 3A : Entrée 4.35V → Sortie 5.05V ; 3.85V → 5.03V ; 3.35V → 5.02V ; 2.85V → 4.81V
- Décharge de tension constante de 4.8V : Entrée 4.35V → Sortie 5.34A ; 3.85V → 4.51A ; 3.35V → 3.75A ; 2.85V → 3.06A
Ports & Notes de configuration (d'après les diagrammes)
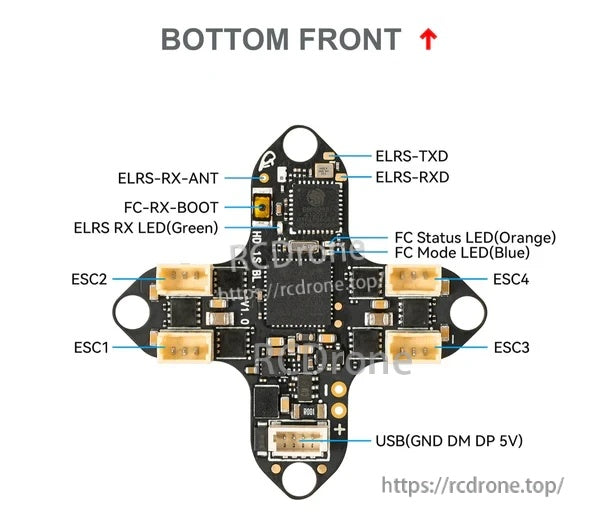
- Pinout USB montré : USB (GND, DM, DP, 5V).
- Les étiquettes de la carte 3EN1 affichées incluent : RX3, RX2, TX2, TX3 ; BATT-, BATT+(1S), 5V, GND ; SBUS (RX1), RX4, TX4 ; LED ; ELRS-RX-ANT ; ELRS-TXD, ELRS-RXD ; FC-RX-BOOT ; ELRS RX LED (Vert) ; FC Status LED (Orange) ; FC Mode LED (Bleu) ; ESC1/ESC2/ESC3/ESC4.
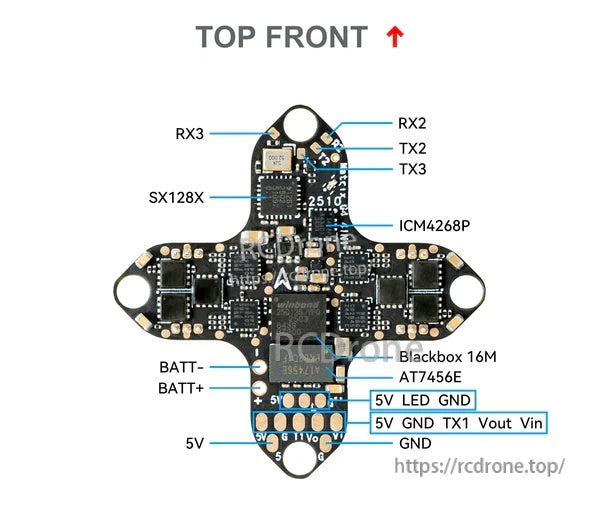
- Les étiquettes de la carte 4EN1 affichées incluent : SX128X ; ICM42688P ; Blackbox 16M ; AT7456E ; ELRS-RX-ANT ; ELRS-TXD, ELRS-RXD ; ESP8285 ; STM32G473 ; FC-RX-BOOT ; FC Status LED ; FC-Mode LED ; ESC1/ESC2/ESC3/ESC4 ; plus les étiquettes de pad incluant 5V/LED/GND et 5V/GND/TX1/Vout/Vin.
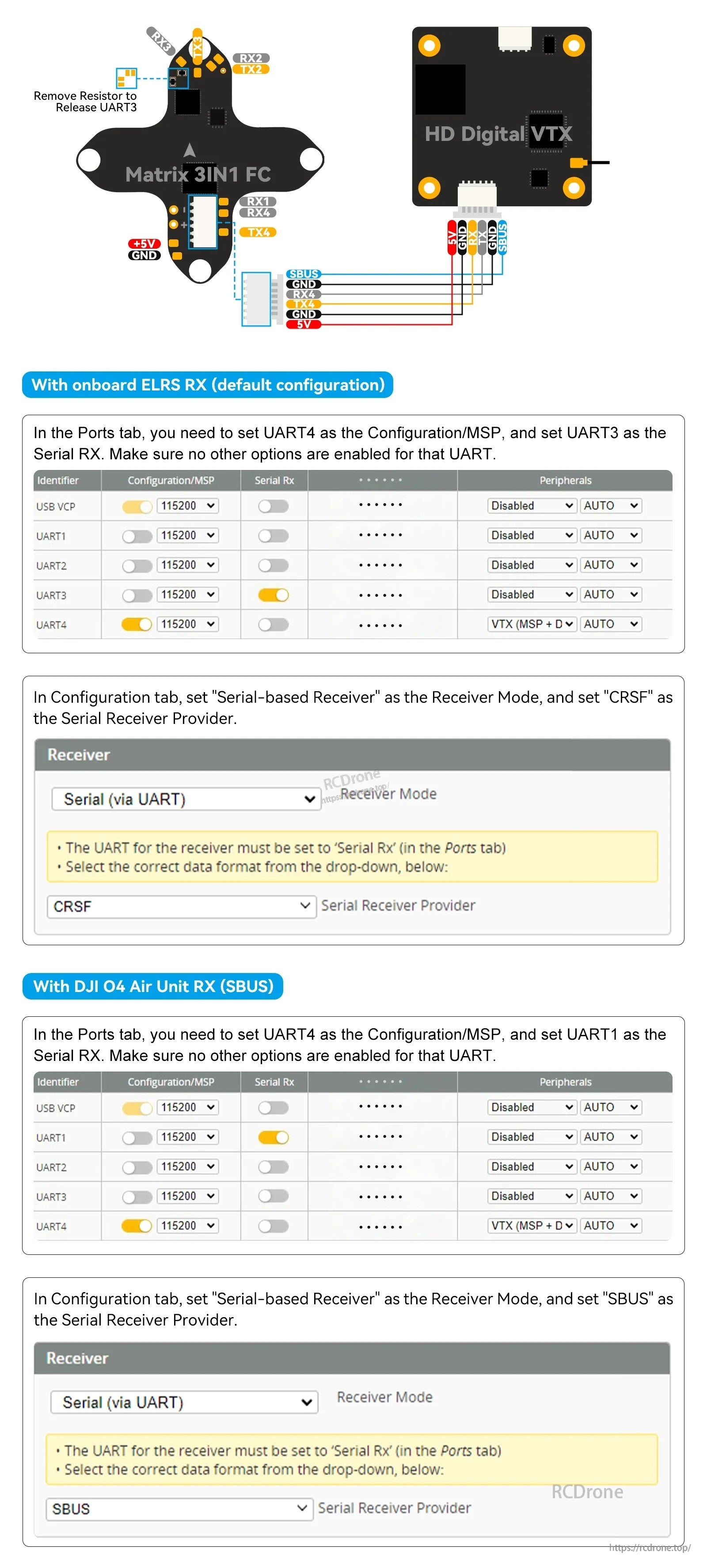
Configuration des ports Betaflight affichée (3EN1)
- Avec ELRS RX intégré (par défaut) : définir UART4 sur Configuration/MSP et UART3 sur RX Série (aucune autre option activée pour UART3). Mode Récepteur : Récepteur basé sur série ; Fournisseur de Récepteur Série : CRSF.
- Avec RX de l'unité aérienne DJI O4 (SBUS) : définir UART4 sur Configuration/MSP et UART1 sur RX Série (aucune autre option activée pour UART1). Mode Récepteur : Récepteur basé sur série ; Fournisseur de Récepteur Série : SBUS.
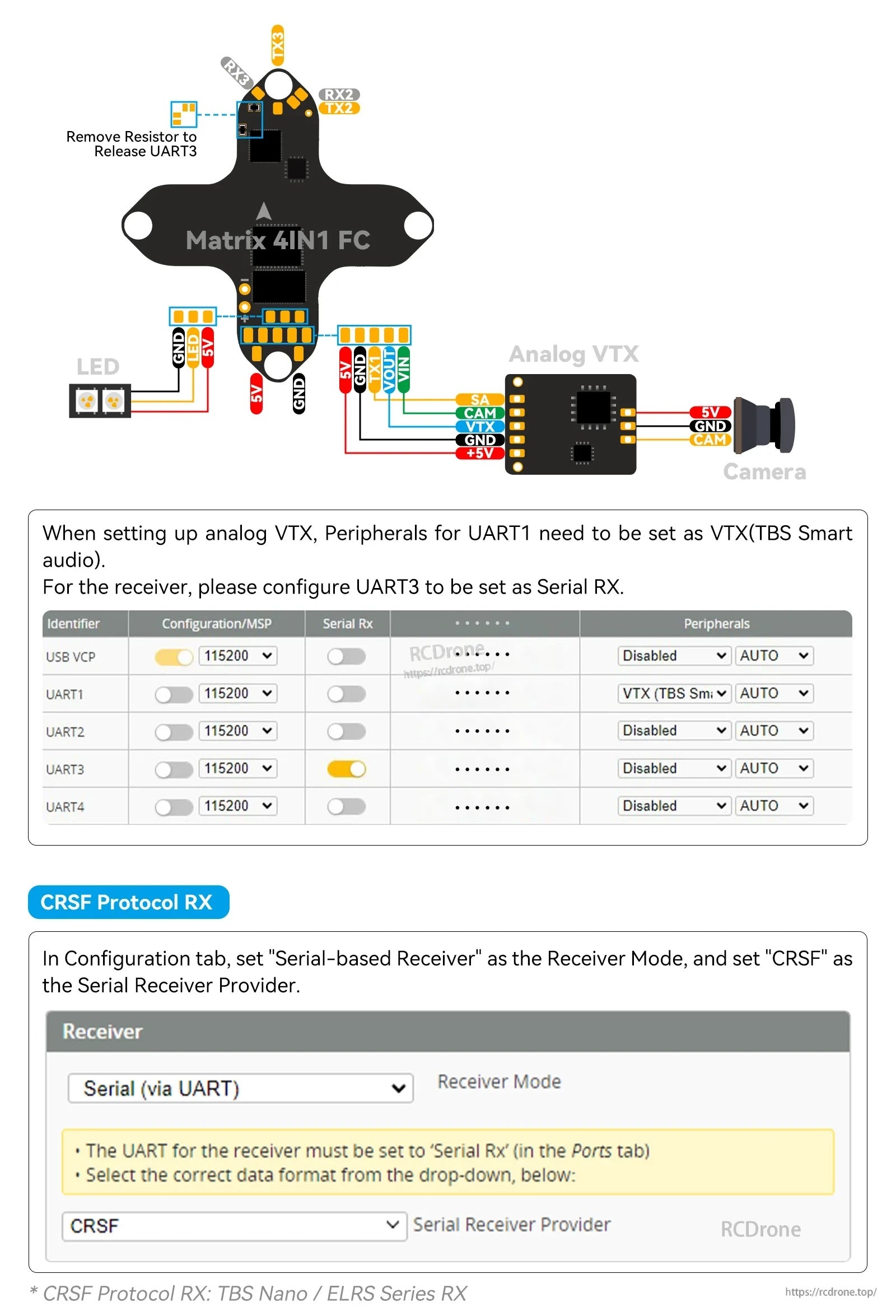
Configuration des ports Betaflight montrée (4IN1)
- Lors de la configuration du VTX analogique : définir les Périphériques pour UART1 sur VTX (TBS Smart audio).
- Pour le récepteur : configurer UART3 comme RX Série.
- Note sur le protocole CRSF RX affichée : TBS Nano / Série ELRS RX.
Firmware
- Firmware FC (3IN1) : Betaflight_4.5.1_BETAFPVG473
- Firmware FC (4IN1) : Betaflight_4.5.2_BETAFPVG473_V2
- Base de firmware ESC (BB51 Bluejay) : A_X_5_96_v0.19.2.hex (supporte DSHOT300/DSHOT600 ; mentionne les options de fréquence PWM fixe 24KHz/48KHz/96KHz et des mélodies de démarrage personnalisées)
Important : À partir du 5 janvier 2026, le FC 3IN1 est censé être expédié avec un gyroscope BMI270. Vérifiez la version du gyroscope avant de flasher le firmware. Le Matrix 1S 3IN1 et 4IN1 nécessitent un firmware différent.
Remarque : Évitez de flasher le firmware ESC avec un intervalle plus court ; il est indiqué que cela peut augmenter le risque de blocage et d'endommagement du contrôleur de vol.
Manuels & Téléchargements
- Firmware 3IN1 + dump CLI : https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- Firmware 4IN1 + dump CLI : https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Notes de version Betaflight 4.5.1 : https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Notes de version Betaflight 4.5.2 : https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Projet Bluejay : https://github.com/bird-sanctuary/bluejay
- Versions Bluejay : https://github.com/bird-sanctuary/bluejay/releases
- Configurateur ESC : https://preview.esc-configurator.com/
- BLHeliSuite16714903 : https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Guide de flashage du firmware ELRS : https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Ce qui est inclus
Package du contrôleur de vol sans balais Matrix 1S (3IN1)
- 1 * Contrôleur de vol sans balais Matrix 1S (3IN1)
- 1 * Adaptateur Type-C vers SH1.0
- 1 * Câble adaptateur SH1.0-4Pin
- 1 * Câble adaptateur SH1.0-6Pin
- 4 * M1.2*4 Vis autotaraudeuses
- 4 * M1.4*5 Vis autotaraudeuses
- 4 * Boules d'amortissement
Contrôleur de vol sans balais Matrix 1S (4IN1) paquet
- 1 * Contrôleur de vol sans balais Matrix 1S (4IN1)
- 1 * Adaptateur Type-C vers SH1.0
- 1 * Câble adaptateur SH1.0-4Pin
- 4 * M1.2*4 Vis autotaraudeuses
- 4 * M1.4*5 Vis autotaraudeuses
- 4 * Boules d'amortissement
Attention
- Conçu pour les nouveaux venus et les pilotes récréatifs, le Matrix FC utilise une carte de 1 mm pour la durabilité et est conçu pour une installation facile.
- Les contrôleurs de vol sont couverts pour les défauts de fabrication. Les problèmes résultant d'erreurs de l'utilisateur, de dommages physiques dus à un crash, de dommages lors de l'installation ou du démontage, de modifications, de surtensions, d'incendies électriques ou d'exposition à l'eau ne sont pas couverts.
Pour des questions de compatibilité (sélection 3IN1 vs 4IN1, câblage ou firmware), contactez le support à https://rcdrone.top/ ou [email protected].
Détails

Choisissez entre la carte 3IN1 pour des constructions numériques HD et l'option 4IN1 qui ajoute le support Betaflight OSD et VTX analogique.


Le BEC 5V/3A mis à jour est caractérisé par une sortie stable sur des tensions d'entrée 1S typiques.

Les connecteurs sans soudure simplifient les installations, avec un port VTX numérique HD dédié et des fils de moteur à brancher.

Pour les constructions analogiques, la version 4IN1 fournit des pads de soudure pour câbler un VTX analogique externe.

Les notes de configuration couvrent le mappage des ports Betaflight commun pour les constructions numériques HD et le récepteur Serial ELRS intégré.
Les conseils de configuration se concentrent sur le câblage VTX analogique et les paramètres CRSF pour le récepteur Serial ELRS intégré.

Les accessoires inclus permettent une configuration et une installation rapides sur banc, avec un adaptateur USB, un câble et du matériel de montage.

Related Collections





