







Mayatech 1258TG V3 20KG Servo - Actionneur à dents en métal étanche et à couple élevé Servo de mécanisme de direction numérique peut être utilisé pour parabolique 1268SG
Mayatech 1258TG V3 20KG Servo - Actionneur à dents en métal étanche et à couple élevé Servo de mécanisme de direction numérique peut être utilisé pour parabolique 1268SG
Mayatech
Impossible de charger la disponibilité du service de retrait
SPÉCIFICATIONS du servomoteur Mayatech 1258TG V3
Nom de la marque : Mayatech
Origine : Chine continentale
Matériau : Matériau composite
Âge recommandé : 12+ans
Pièces et accessoires RC : Servos
Pour le type de véhicule : Avions
Utilisation : Véhicules et jouets télécommandés
Périphériques/dispositifs de télécommande : Servos
Fournitures d'outils : Outils
Quantité : 1 pièce
Numéro de modèle : 1258TG 1268SG

Servo étanche Mayatech 1258TG V3 : mise à niveau de V2 à V3, avec un matériel amélioré et une entretoise en caoutchouc pour une résistance accrue à l'eau. Grâce à des mises à jour et des tests constants, ce servo a été renforcé avec de meilleurs matériaux et une applicabilité de surface améliorée.

Servo numérique Mayatech 1258TG V3, actionneur à dents métalliques étanche et à couple élevé, compatible avec le servo de mécanisme de direction parabolique modèle 1268SG.

Servo Mayatech 1258TG V3, étanche, actionneur à dents métalliques à couple élevé, mécanisme de direction numérique pour contrôle de mouvement parabolique, compatible avec le 1268SG de Mayatech.
Dents métalliques à couple élevé
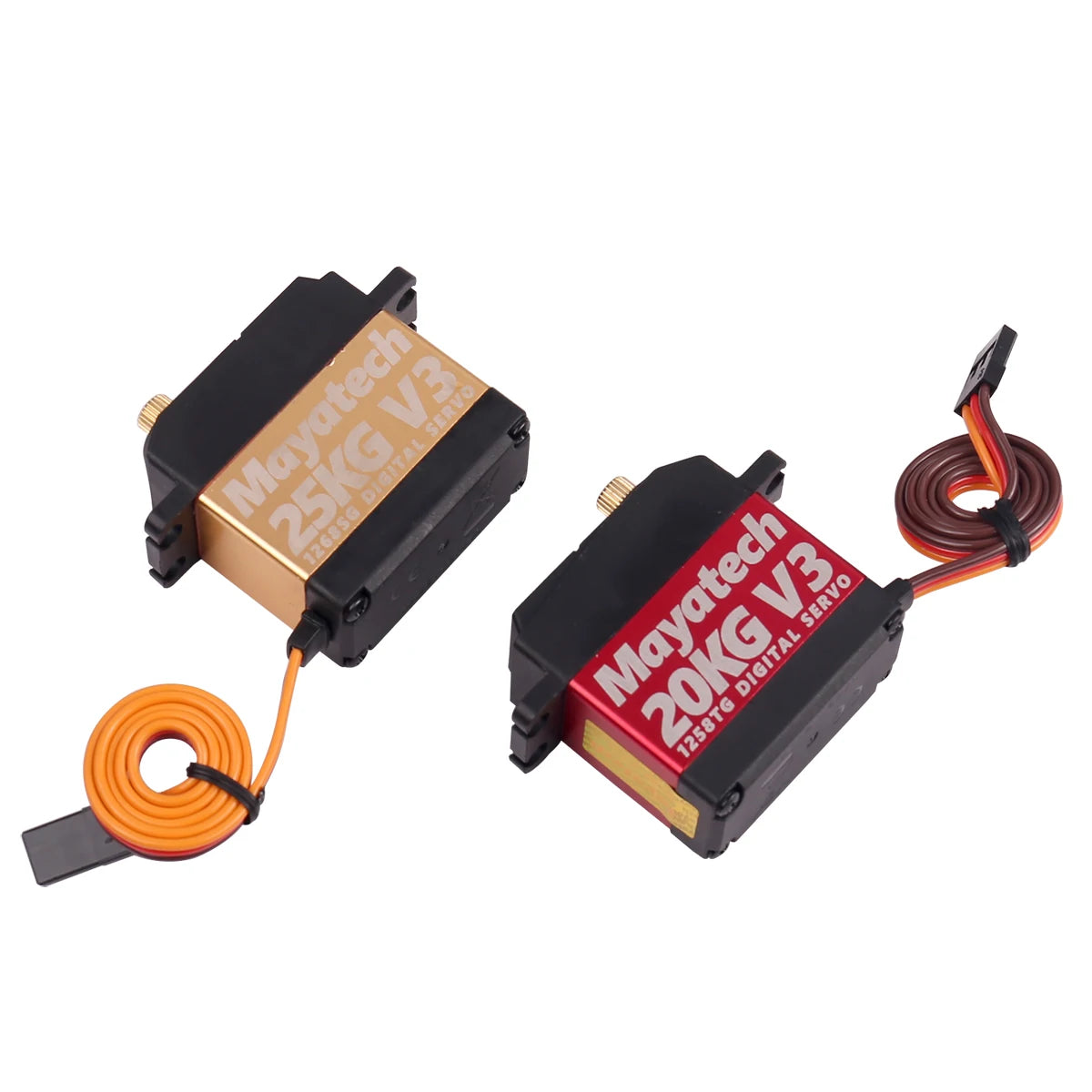
Servo Mayatech 1258TG V3
Grand couple de 20 kg/25 kg, dents en cuivre entièrement métalliques, double roulement, haute précision, faible bruit, grand angle, performances stables

Le servo V3 de Mayatech est doté d'un mécanisme de direction numérique et d'une conception étanche, avec un actionneur à dents métalliques à couple élevé adapté aux systèmes paraboliques.
Puce importée
Réponse rapide, pas de tremblement du gouvernail, sortie rapide, mode numérique, vitesse d'alésage rapide, sûr et stable, pour que vous puissiez jouer vos cascades librement

Servo numérique Mayatech 1258TG V3, actionneur à dents métalliques étanche à couple élevé, adapté aux systèmes paraboliques et compatible avec l'appareil à gouverner 1268SG de Mayatech.
IP86 étanche
Tous les trous sont équipés de joints étanches, afin que vous puissiez patauger sans souci (il peut empêcher les éclaboussures et ne peut pas être immergé dans l'eau pendant une longue période)

Le servo étanche de Mayatech est doté de trois anneaux d'étanchéité en caoutchouc, testés selon les normes IP86, garantissant des performances fiables même dans des conditions humides.
Coque centrale en métal
Coque centrale en alliage d'aluminium CNC, haute résistance, résistance à la corrosion et durabilité

Servo de direction numérique étanche Mayatech 1258TG V3 avec couple élevé et actionneur à dents métalliques, compatible avec le parabolique 1268SG.
Ligne de direction en silicone
Fiche JR, forte adaptabilité, fil de silicone résistant à la corrosion, longueur de fil de 265 mm

Accessoires : bras de gouvernail complet
Comprend un ensemble d'accessoires pour appareil de direction, droit, demi-croix, type *, disque et vis associées

Présentation des tailles

Le servo 1258TG V3 de Mayatech est doté d'une conception étanche, d'un actionneur à dents métalliques à couple élevé et d'un mécanisme de direction numérique pour une utilisation avec des systèmes paraboliques comme le 1268SG.

Le servo 1258TG V3 de Mayatech présente une conception étanche, un actionneur à dents métalliques de 20 kg et un couple élevé. Avec un poids de 68g et un roulement de 2BB, ce servo numérique de direction convient aux systèmes paraboliques comme le 1268SG.
Plage d'angle : angle réel 120 ± 2 °, environ 60 degrés
Engrenage : dents en acier titane
Vitesse (4,8V) : 0,13 sec / 60 °
Vitesse (6V) : 0,11 sec / 60 °
Couple (4,8 V) : 17,25 kg cm (239,55 oz/po)
Couple (6 V) : 20,32 kg cm (281,89 oz/po)
Taille : 40,5x20,2x38 mm / (taille standard)
Poids : 65 g (2,18oz)
Câble de connexion : fiche JR (Futaba universelle) 265 mm (10,43 in)
Roulement : la partie de joint de dent 2BB est équipée d'un roulement et le fonctionnement est fluide sans blocage
Dent de sortie : 25T (Futaba général)
Comprend un ensemble d'accessoires pour appareil de direction, droit, demi-croix, type *, disque et vis associées
Poids total du colis métallique : 139 g
Remarque :plage de largeur d'impulsion : 500 μ s-2 500 μ S (convient à la télécommande et au contrôle par microcontrôleur) zone morte : 2 μ s

Le servo 1268SG V3 de Mayatech est doté d'une conception étanche, d'un actionneur à dents métalliques à couple élevé et d'un mécanisme de direction numérique. Il a un poids de 68 g, une torsion de 25 kg et un roulement de 2 BB. Le nombre de dents de sortie est de 25 T (monnaie Futaba) avec une plage d'impulsions de 500 à 2 500 us.
Plage d'angle : angle réel 120 ± 2 °, environ 60 degrés
Engrenage : dents en cuivre métallique
Vitesse (4,8V) : 0,13 sec / 60 °
Vitesse (6V) : 0,11 sec / 60 °
Couple (4,8 V) : 19,9 kg cm (239,55 oz/po)
Couple (6 V) : 25,32 kg cm (281,89 oz/po)
Taille : 40,5x20,2x38 mm / (taille standard)
Poids : 68 g (2,18 oz)
Câble de liaison : fiche JR (Futaba universelle) 265 mm (10.43 pouces)
Roulement : la partie de joint de dent 2BB est équipée d'un roulement, et le fonctionnement est fluide sans blocage
Dent de sortie : 25t (Futaba général)
Comprend un ensemble d'accessoires pour appareil de direction, droit, demi-croix, type *, disque et vis associées
Poids total du colis métallique : 139 g
Remarque :plage de largeur d'impulsion : 500 μ s-2 500 μ S (convient à la télécommande et au contrôle par microcontrôleur) zone morte : 2 μ s
Affichage du produit :

Le servo numérique Mayatech 1258TG V3 est doté d'un actionneur à dents métalliques étanche et à couple élevé, compatible avec les systèmes d'engrenages paraboliques.

Le servomoteur de direction numérique 1258TG V3 de Mayatech présente un couple élevé et une conception étanche, ce qui le rend adapté à diverses applications, notamment les systèmes paraboliques. Le servo est doté d'un actionneur à dents métalliques et peut être utilisé en remplacement ou en mise à niveau du modèle 1268SG.



Le servo numérique MayaTech 1258TG V3 est doté d'une conception étanche, d'un actionneur à dents métalliques à couple élevé et d'un mécanisme de direction numérique pour contrôle précis. Compatible avec les systèmes paraboliques comme le 1268SG.

Le servo numérique étanche de Mayatech, modèle 1258TG-V3, est doté d'un actionneur à dents métalliques à couple élevé et d'un mécanisme de direction numérique, adapté aux applications paraboliques.

Emballage en coque métallique :

Le servo numérique 20 KG V3 1258TG de Mayatech est doté d'un actionneur à dents métalliques étanche et à couple élevé, idéal pour les applications paraboliques.

Servo Mayatech 1258TG V3 20KG - Actionneur à dents métalliques étanche et à couple élevé, servomoteur de direction numérique pour applications paraboliques.

Servo numérique VB 20 KG de Mayatech avec couple élevé et conception étanche, adapté aux systèmes paraboliques.

Le servo 1258TG V3 de Mayatech est un mécanisme de direction numérique étanche et à couple élevé, doté d'un actionneur à dents métalliques pour un contrôle précis. Compatible avec le système parabolique 1268SG.

Servo de direction numérique étanche Mayatech 1258TG V3, actionneur à dents métalliques à couple élevé, compatible avec Mayatech 1268SG et autres modèles.
Une vitesse de réaction rapide et un couple important peuvent être appliqués aux hélicoptères, aux voilure fixes, aux modèles de véhicules et de navires et aux robots. C'est un appareil à gouverner polyvalent, largement recommandé par les amis modèles !

Ajustement universel pour les modèles réduits de voitures, les voitures grimpantes, les camions et plus encore.

Servo de direction numérique à couple élevé avec actionneur à dents métalliques étanche, adapté aux hélicoptères électriques, aux modèles réduits d'avions et de navires, doté d'une conception robuste et de performances fiables.
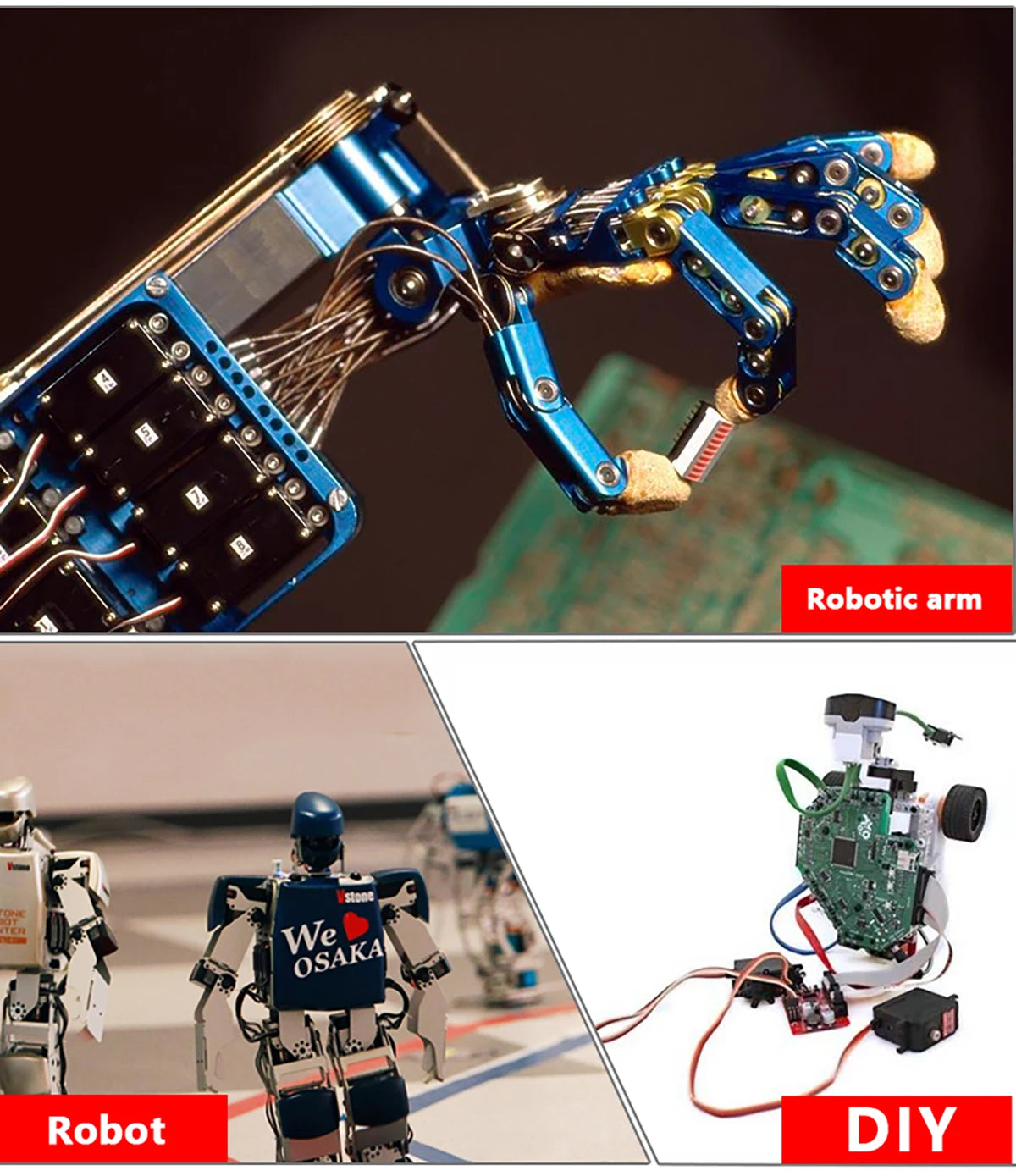
Le servo 1258TG V3 de Mayatech est doté d'une conception étanche, d'un actionneur à dents métalliques à couple élevé et d'un mécanisme de direction numérique pour un contrôle précis du bras robotique.

Différence entre un boîtier de direction numérique (numérique) et un boîtier de direction analogique
Le servo numérique et le servo analogique sont identiques dans leur structure mécanique de base, principalement composés d'un moteur, d'un réducteur et d'un circuit de commande. La plus grande différence entre le servo numérique et le servo analogique se reflète dans le circuit de commande. Le circuit de commande du servo numérique est plus un microprocesseur et un oscillateur à cristal que celui du servo analogique.Ne sous-estimez pas ce changement, il a un impact décisif sur l'amélioration des performances de l'appareil à gouverner.
Le boîtier de direction numérique diffère du boîtier de direction analogique sur les deux points suivants :
La méthode de traitement du signal d'entrée du récepteur ;
La manière de contrôler le courant initial du moteur de l'appareil à gouverner réduit la zone de non-réaction (la zone de contrôle qui ne répond pas à une petite quantité de signaux), augmente la résolution et génère une plus grande force fixe.
Lorsque l'appareil à gouverner simulé est déchargé, aucune puissance n'est transmise au moteur de l'appareil à gouverner. Lorsqu'il y a une entrée de signal pour déplacer l'appareil à gouverner, ou lorsque le culbuteur de l'appareil à gouverner reçoit une force externe, l'appareil à gouverner réagit et transmet la puissance (tension) au moteur de l'appareil à gouverner. Cette puissance est en fait transmise 50 fois par seconde, modulée dans la tension maximale de l'impulsion marche/arrêt, et génère de petits segments de puissance. Lorsque la largeur de chaque impulsion est augmentée, par exemple, l'efficacité de la transmission électronique apparaîtra jusqu'à ce que la puissance/tension maximale soit transmise au moteur, et le moteur tourne pour pointer le culbuteur du mécanisme de direction vers une nouvelle position. Ensuite, lorsque le potentiomètre de l'appareil à gouverner indique à la partie électronique qu'il a atteint la position spécifiée, l'impulsion de puissance réduira la largeur d'impulsion et ralentira le moteur. Jusqu'à ce qu'il n'y ait plus d'alimentation électrique, le moteur s'arrête complètement.
L'"inconvénient" de la simulation de l'appareil à gouverner est qu'en supposant une courte impulsion de puissance suivie d'une longue pause, il ne peut pas appliquer beaucoup d'excitation au moteur pour le faire tourner. Cela signifie que s'il y a une petite action de commande, l'appareil à gouverner enverra une petite impulsion initiale au moteur, ce qui est très inefficace. C'est également la raison pour laquelle il existe une « zone de non-réaction » dans l'appareil à gouverner simulé. Par exemple, l'appareil à gouverner est très lent à répondre aux petits mouvements de l'émetteur, voire aucune réponse.
Par rapport au boîtier de direction analogique traditionnel, le boîtier de direction numérique présente deux avantages :
Grâce au microprocesseur, le boîtier de direction numérique peut traiter le signal d'entrée en fonction des paramètres définis avant d'envoyer l'impulsion de puissance au moteur du boîtier de direction. Cela signifie que la largeur de l'impulsion de puissance, c'est-à-dire la puissance du moteur d'excitation, peut être ajustée en fonction du calcul du programme du microprocesseur pour s'adapter aux différentes exigences fonctionnelles et optimiser les performances de l'appareil à gouverner.
Le servo numérique envoie des impulsions de puissance au moteur à une fréquence beaucoup plus élevée. Autrement dit, par rapport aux 50 impulsions/secondes traditionnelles, il s'agit désormais de 300 impulsions/seconde. Bien que la largeur de chaque impulsion de puissance soit réduite en raison de la haute fréquence, le moteur reçoit simultanément davantage de signaux d'excitation et tourne plus rapidement. Cela signifie également que non seulement le servomoteur répond au signal de l'émetteur à une fréquence plus élevée, mais que la « zone de non-réponse » devient également plus petite ; La réaction devient plus rapide ; Accélération et décélération plus rapides et plus douces ; Le mécanisme de direction numérique offre une plus grande précision et une meilleure force fixe.
Related Collections










