

MUWEIDU K4030 Moteur Servo 16V 750tr/min 0,65N.m Couple Max 18bits Encodeur RS485/CAN
MUWEIDU K4030 Moteur Servo 16V 750tr/min 0,65N.m Couple Max 18bits Encodeur RS485/CAN
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU Le moteur K4030 est un moteur à courant continu sans balais de la série K à vitesse moyenne à élevée (moteur servo) avec un design de conduite électrique intégré (driver intégré et encodeur magnétique). Il prend en charge le contrôle de la vitesse/position et communique via RS485 ou CAN, ce qui le rend adapté aux actionneurs robotiques et mécatroniques compacts.
Caractéristiques clés
- Moteur servo FOC haute performance
- Conception intégrée moteur + driver
- Driver intégré et encodeur magnétique
- Précision de l'encodeur améliorée de 14 bits à 18 bits
- Couple de cogging du moteur optimisé
- Entrée PWM prise en charge
- Conception de produit ultra-haut standard
- Réglage / test / mise à jour du firmware basé sur PC disponible
- Compatible avec les plateformes de développement open-source, y compris PC, MCU, PLC, ordinateur industriel et Raspberry Pi
- Modes de contrôle multiples affichés : Mode Couple, Mode Vitesse, Mode Contrôle Multi-Tours (avec limite de vitesse), Mode Position + Direction à Un Tour (avec limite de vitesse), Mode Position Incrémentale (avec limite de vitesse)
- Mécanismes de protection multicouches (texte de fonctionnalité UI logiciel)
- Fonction de frein réservée (texte de fonctionnalité UI logiciel)
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
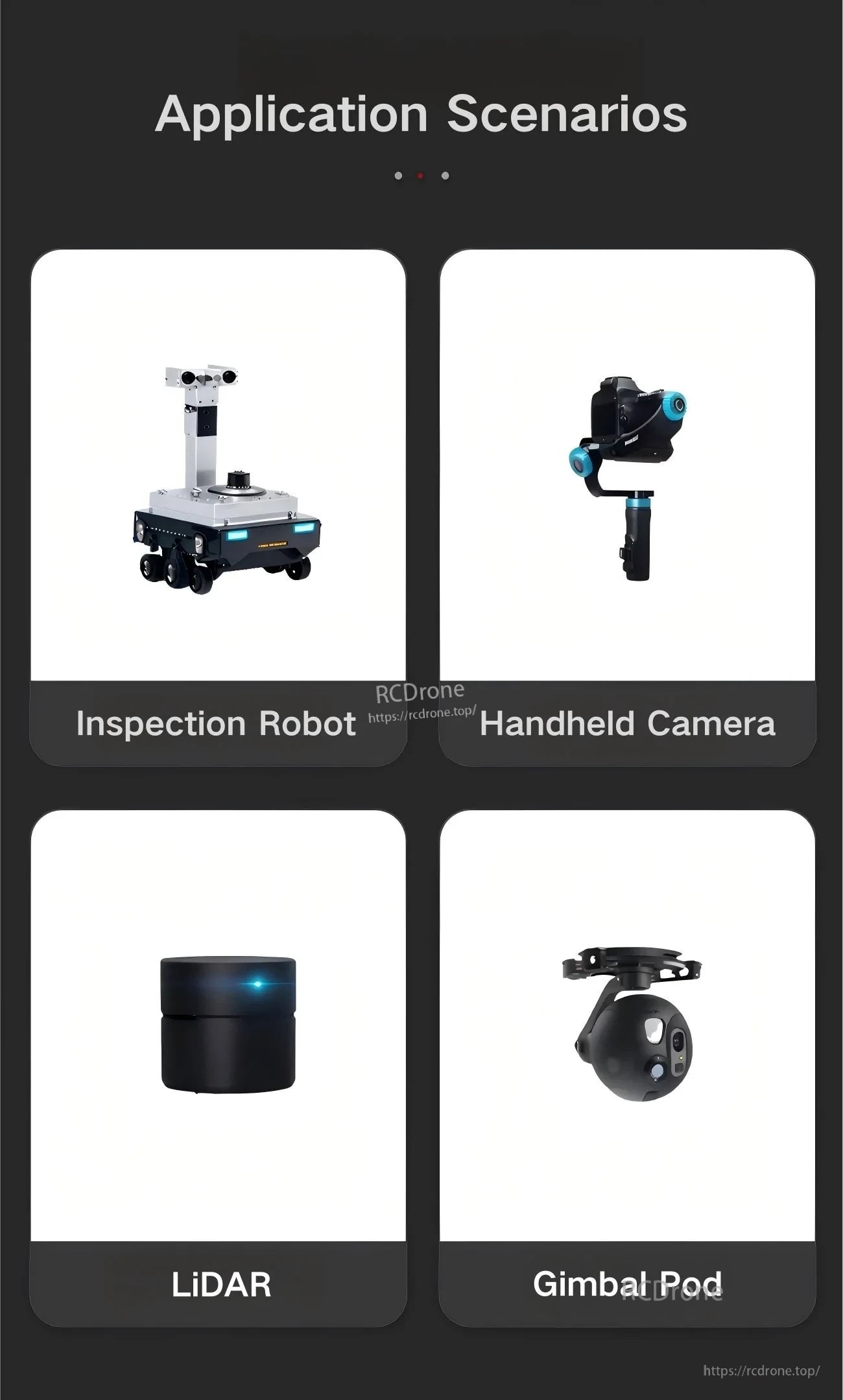
- Robot d'inspection
- Caméra portable
- LiDAR
- Gimbal/Pod
Spécifications
| Modèle | K4030 |
| Tension nominale | 16V |
| Courant nominal | 2.2A |
| Puissance de crête | 22W |
| Couple nominal | 0.25N.m |
| Couple de crête | 0.65N.m |
| Vitesse nominale | 750rpm |
| Encodeur | 18bit |
| Inertie du rotor | 81gcm^2 |
| Surveillance de la température du moteur | OUI |
| Modes de contrôle | Vitesse/Position |
| Protocole de communication | RS485 ou CAN |
| Dimensions globales | Phi39.6mm x 23mm |
| Poids | 65g |
Interface / Définition des broches
Étiquettes d'interface affichées : COMMUTATEUR D'IDENTIFICATION, CAN/RS485.
| Interface | Note |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation Négative |
| V- | Alimentation Négative |
| V+ | Alimentation Positive |
| V+ | Alimentation Positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND Signal |
Manuels
Pour des conseils sur la sélection ou un support d'intégration (câblage RS485/CAN, configuration du mode de contrôle ou questions de documentation), contactez le support à https://rcdrone.top/ ou par email [email protected].
Détails

Un moteur servo de la série K compact avec électronique de commande intégrée pour un couple, une vitesse et un contrôle de position haute performance.
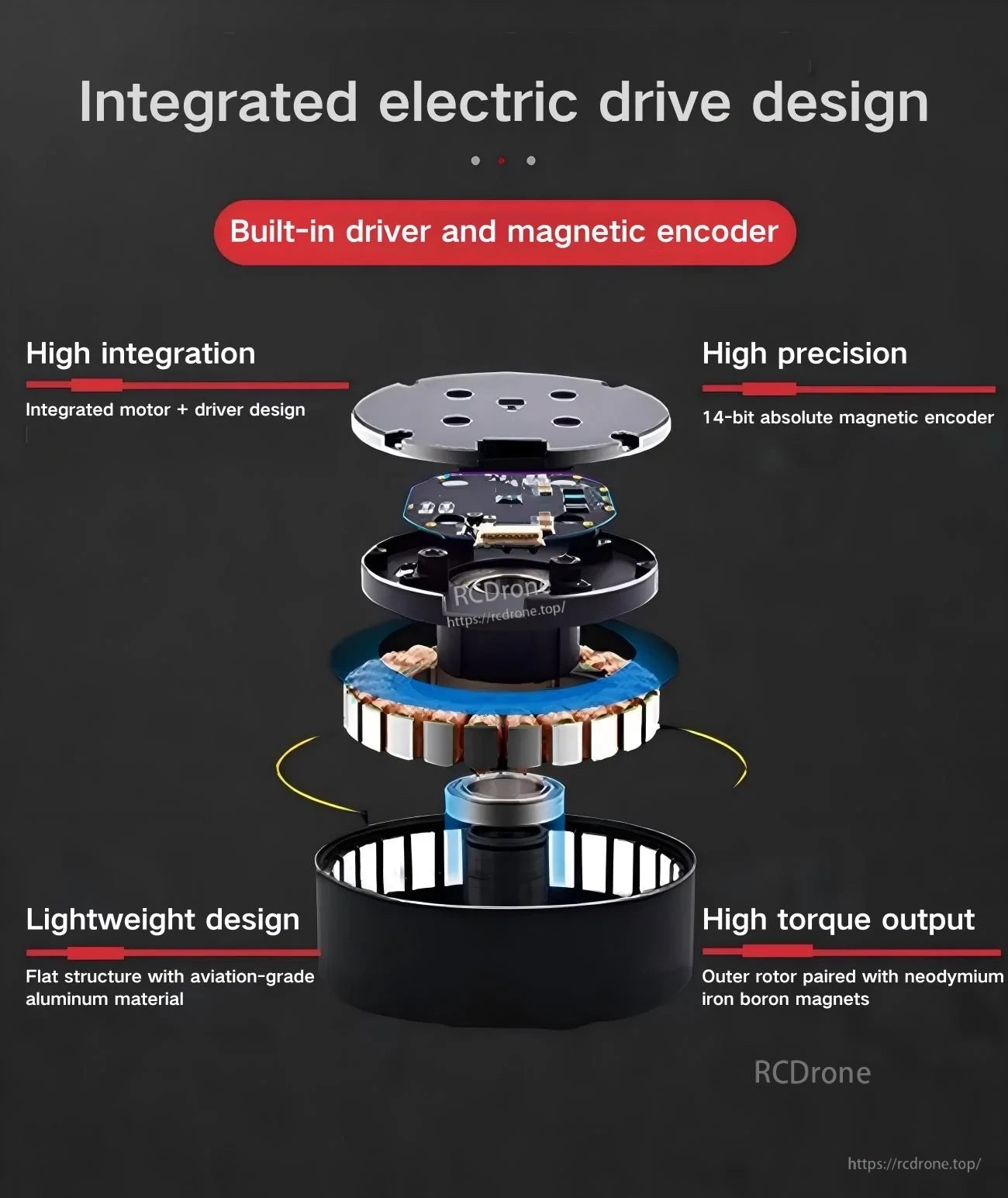
Moteur, driver et encodeur magnétique intégrés aident à réduire le câblage et à simplifier les constructions d'actionneurs robotiques compacts.

Un étiquetage clair de l'interface facilite le câblage de l'alimentation et la configuration de la communication RS485 ou CAN lors de l'intégration.

Le réglage et les tests basés sur PC prennent en charge plusieurs modes de contrôle, avec des fonctionnalités de mise à jour du firmware et de protection disponibles dans le logiciel.
Convient aux projets de robotique et de stabilisation tels que les plateformes d'inspection, les stabilisateurs et les charges utiles de capteurs.
Related Collections

