

MUWEIDU K6030 (15/25T) Moteur servo CC sans balais 24V, encodeur 18 bits, RS485/CAN, Φ58×34mm
MUWEIDU K6030 (15/25T) Moteur servo CC sans balais 24V, encodeur 18 bits, RS485/CAN, Φ58×34mm
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU Le moteur K6030 est un moteur servo à courant continu sans balais de la série K, à vitesse moyenne à élevée, avec un design de moteur servo FOC haute performance et un design de conduite électrique intégré (driver intégré et encodeur magnétique). Il prend en charge le contrôle de vitesse/position et la communication via RS485 ou CAN pour les systèmes de contrôle de mouvement en robotique et en automatisation.
Caractéristiques clés
- Moteur servo FOC haute performance
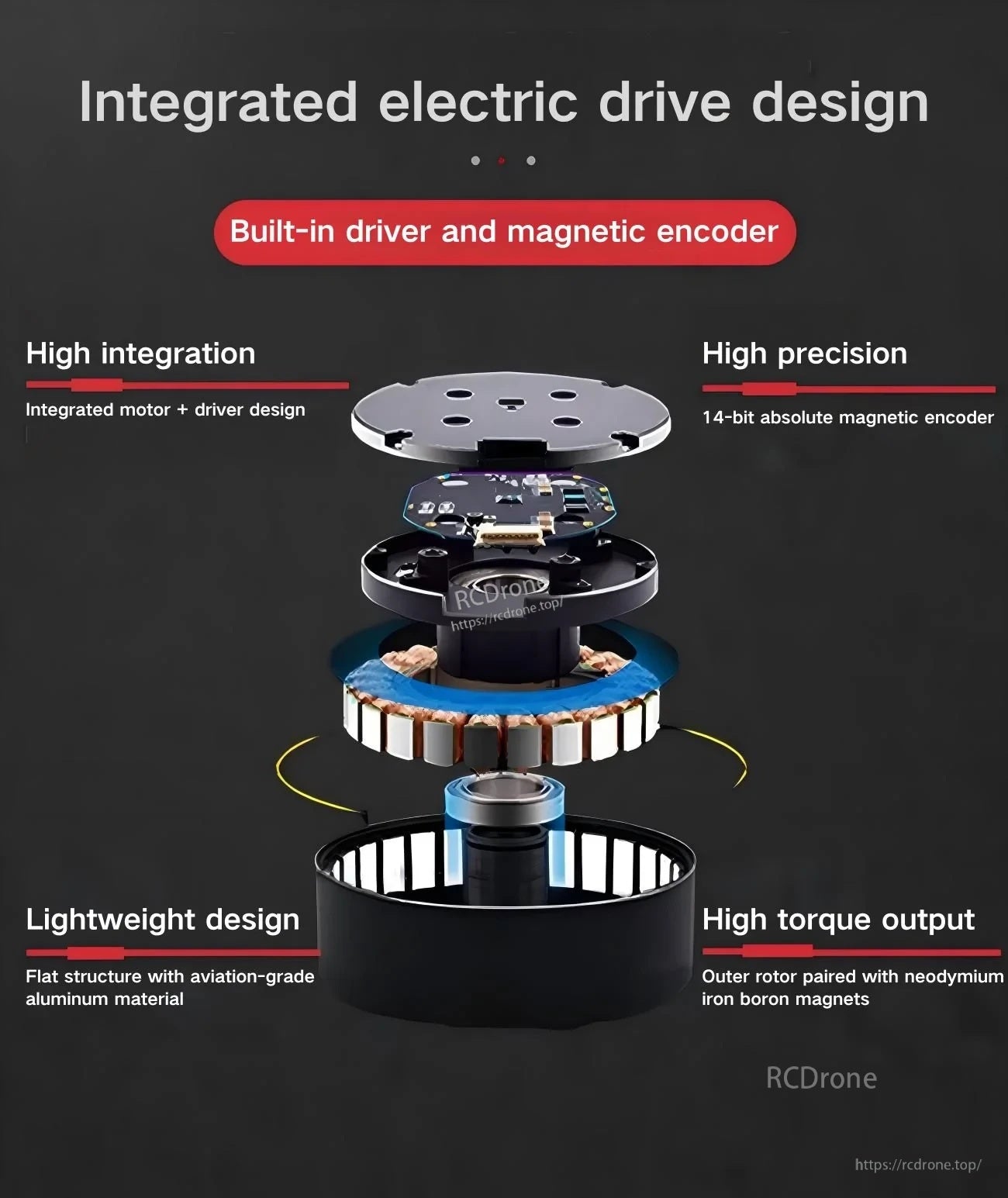
- Conception de conduite électrique intégrée : pilote et encodeur magnétique intégrés
- Précision de l'encodeur améliorée de 14 bits à 18 bits
- Couple de cogging du moteur optimisé
- Entrée PWM prise en charge
- Haute intégration : conception moteur + pilote intégrée
- Sortie de couple élevée : rotor externe associé à des aimants en néodyme fer boron
- Conception légère : structure plate en matériau en aluminium de qualité aéronautique
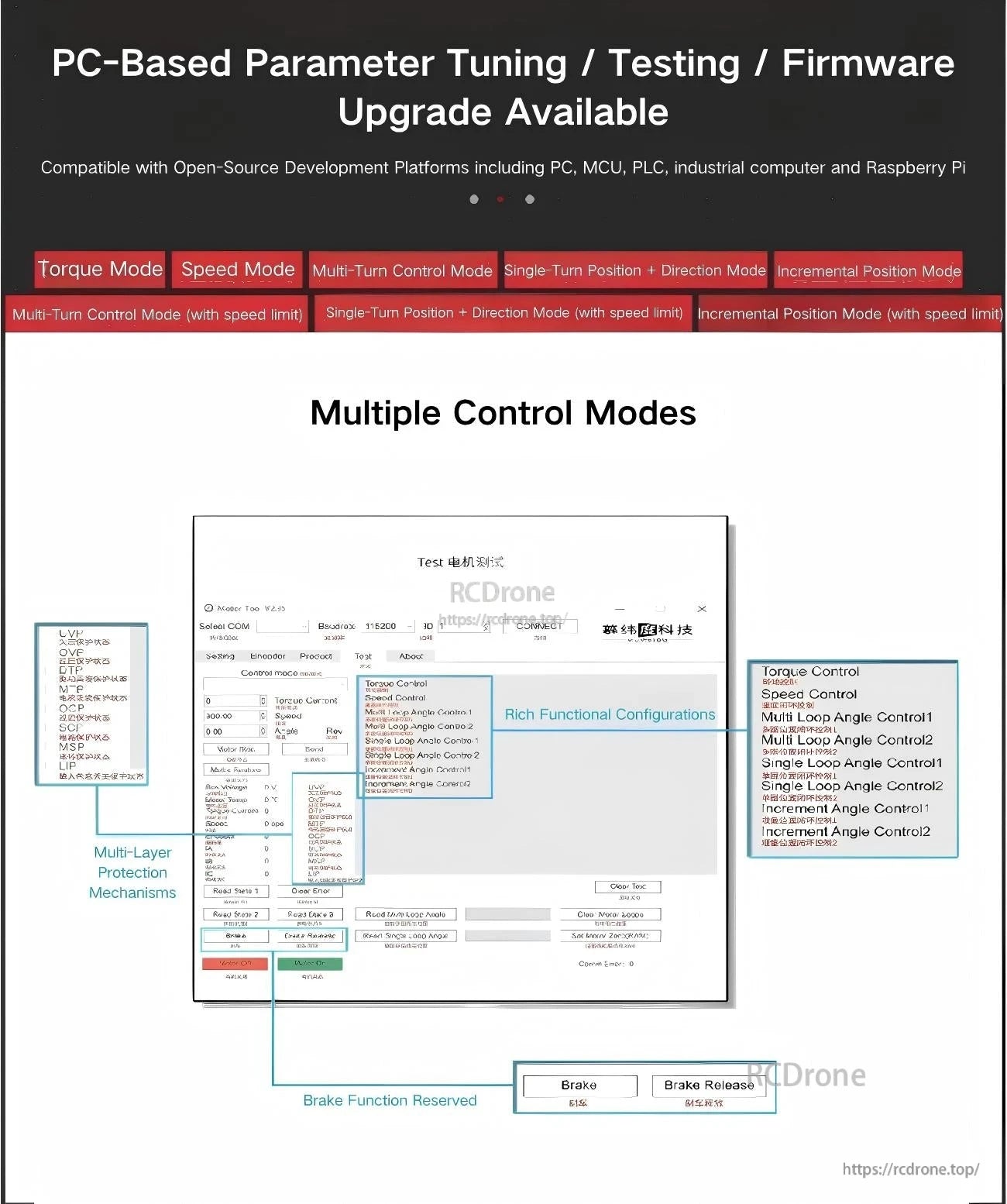
- Réglage / test / mise à jour du firmware basé sur PC disponible
- Compatible avec des plateformes de développement open-source, y compris PC, MCU, PLC, ordinateur industriel et Raspberry Pi
- Modes de contrôle multiples affichés : Mode Couple ; Mode Vitesse ; Mode Contrôle Multi-Tours ; Mode Position + Direction à Un Tour ; Mode Position Incrémentale (avec limite de vitesse)
- Mécanismes de protection multicouches ; configurations fonctionnelles riches ; fonction de frein réservée ; Frein / Libération du frein
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Robot d'inspection
- Caméra portable
- LiDAR
- Pod stabilisateur
Pour une sélection en pré-vente ou un support d'intégration, contactez [email protected] or visitez https://rcdrone.top/.
Spécifications
| Modèle | K6030 (15/25T) |
| Tension nominale | 24V |
| Courant nominal | 5.87A / 3.1A |
| Puissance de crête | 185W / 57W |
| Couple nominal | 0.81 N.m |
| Couple de crête | 5.5 N.m / 3 N.m |
| Vitesse Évaluée | 1260 tr/min / 560 tr/min |
| Encodeur | 18 bits |
| Inertie du Rotor | 515 gcm² |
| Surveillance de la Température du Moteur | OUI |
| Modes de Contrôle | Vitesse/Position |
| Protocole de Communication | RS485 ou CAN |
| Dimensions Globales | Φ58 mm x 34 mm |
| Poids | 251 g |
Définition de l'Interface (CAN/RS485)
- ID SWITCH
- CAN/RS485
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation Négative |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | Signal GND |
Manuels
Détails

Le MUWEIDU K6030 intègre le contrôle de servo FOC avec un moteur BLDC compact et à couple élevépour la robotique et l'automatisation.
Une architecture de moteur + driver intégrée réduit le câblage et simplifie l'installation tout en maintenant un contrôle de rétroaction précis.

Un étiquetage clair des broches CAN/RS485 et d'alimentation, ainsi qu'un interrupteur d'identification intégré, aident à rationaliser les configurations de bus multi-moteurs.

Related Collections

