

MUWEIDU K7050 Moteur 24V DC sans balais FOC Servo, Encodeur 18 bits, RS485/CAN, Φ69×46mm
MUWEIDU K7050 Moteur 24V DC sans balais FOC Servo, Encodeur 18 bits, RS485/CAN, Φ69×46mm
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
Le MUWEIDU K7050 Moteur est un moteur à courant continu sans balais de la série K, conçu comme un moteur servo FOC de haute performance avec un design de conduite électrique intégré. Il dispose d'un driver intégré et d'un encodeur magnétique, prend en charge le contrôle de vitesse/position et fournit une communication RS485 ou CAN pour des projets de robotique et d'automatisation.
Caractéristiques clés
- Moteur servo FOC haute performance
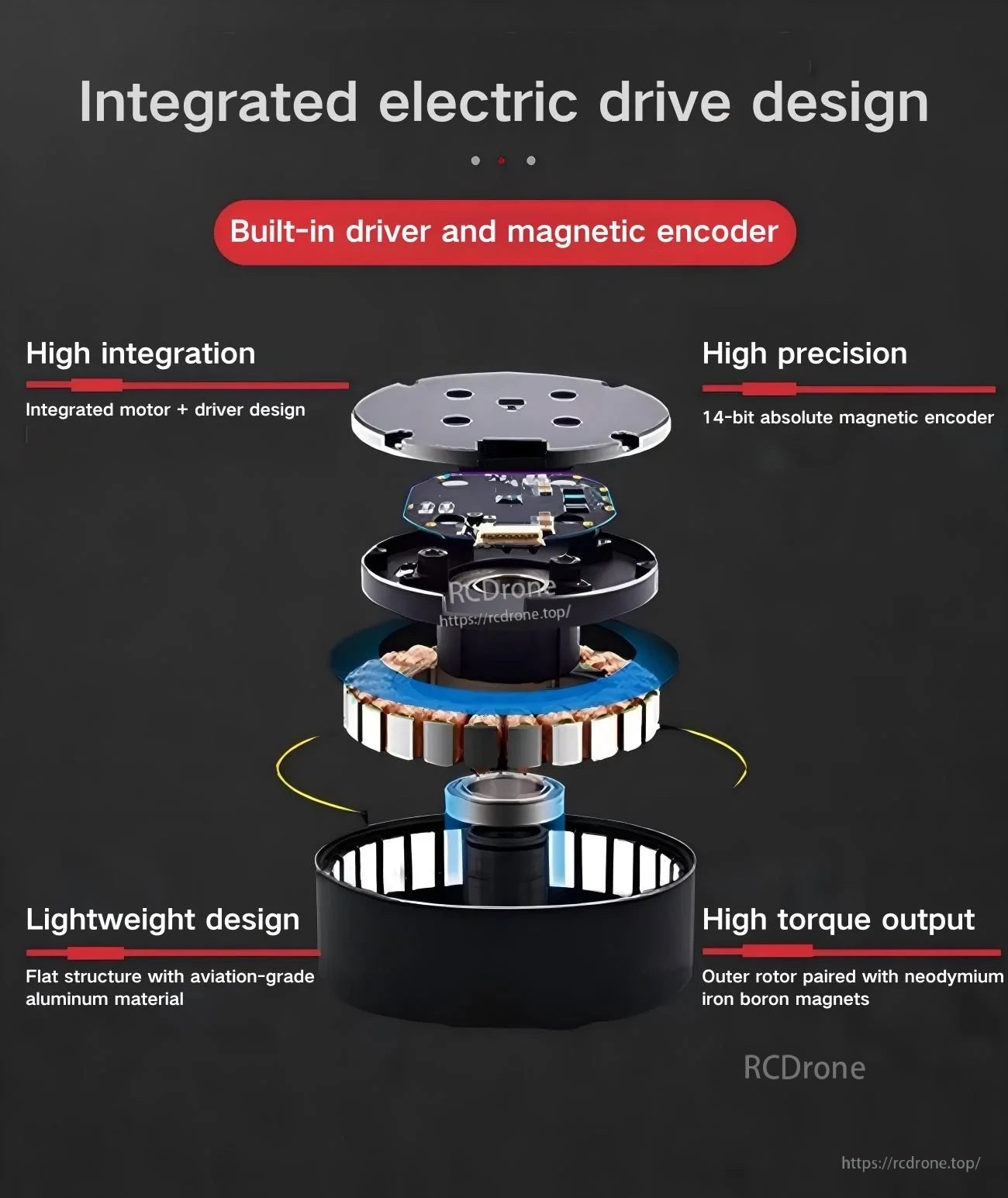
- Conception de conduite électrique intégrée : pilote et encodeur magnétique intégrés
- Conception intégrée, légère, haute précision et couple élevé
- Précision de l'encodeur améliorée de 14 bits à 18 bits
- Couple de cogging du moteur optimisé
- Entrée PWM prise en charge
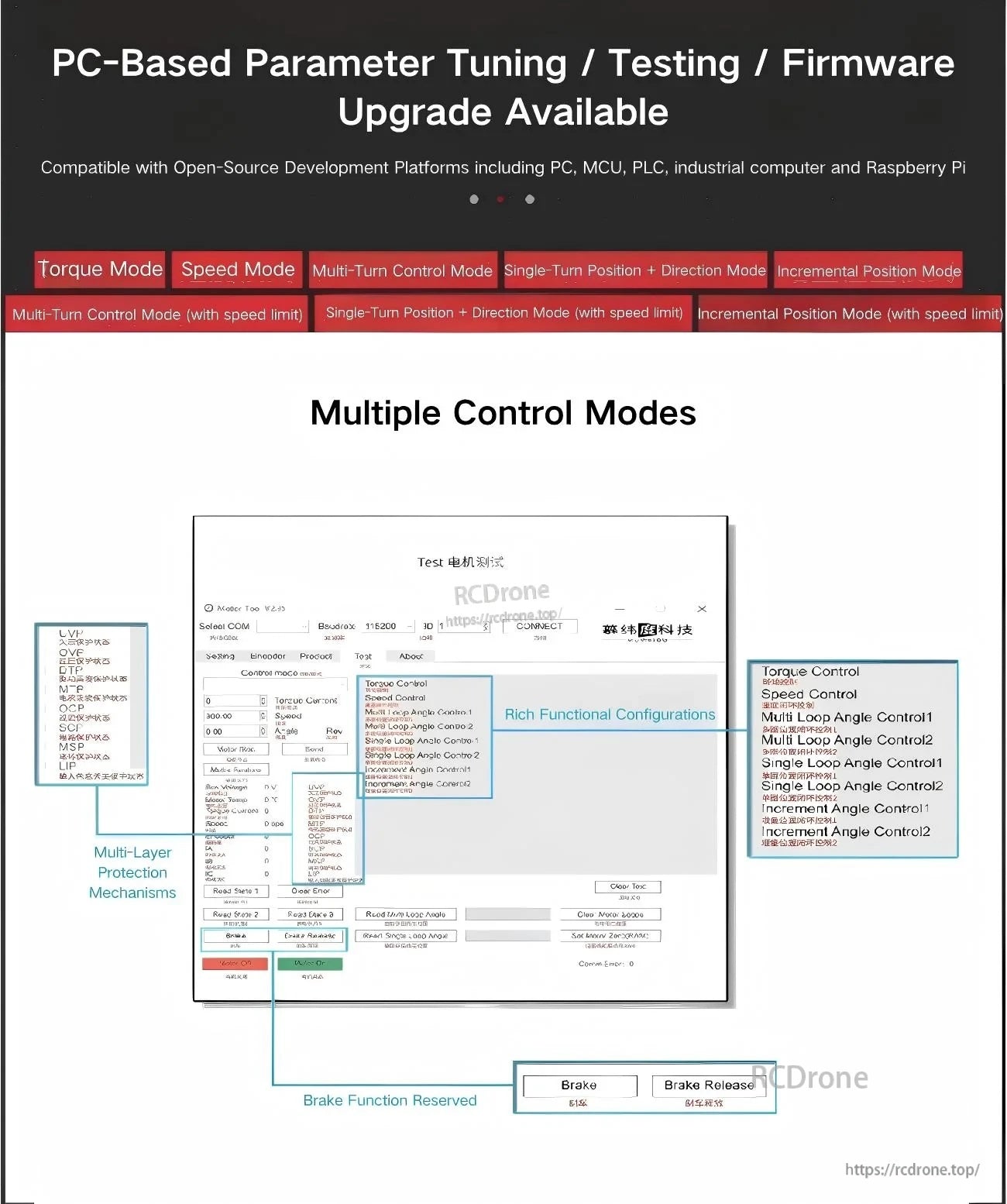
- Réglage / test des paramètres / mise à jour du firmware basé sur PC disponible
- Compatible avec des plateformes de développement open-source, y compris PC, MCU, PLC, ordinateur industriel et Raspberry Pi
- Modes de contrôle multiples affichés : Mode Couple, Mode Vitesse, Mode Contrôle Multi-Tours, Mode Position + Direction à Un Tour, Mode Position Incrémentale
- Mécanismes de protection multicouches (affichés)
- Fonction de frein réservée (affichée) ; Frein / Libération de frein
Spécifications
| Modèle | K7050 (10/28/45T) | Tension nominale | 24V |
| Courant nominal | 8.9A / 3.36A / 2A |
| Puissance de pointe | 278W / 44W / 17.5W |
| Couple nominal | 1.6 N.m / 1.6 N.m / 1.5 N.m |
| Couple de pointe | 2.1 N.m / 2.9 N.m / 2.7 N.m |
| Vitesse Évaluée | 970 tr/min / 250 tr/min / 100 tr/min |
| Encodeur | 18 bits |
| Inertie du Rotor | 1040 gcm² |
| Surveillance de la Température du Moteur | OUI |
| Modes de Contrôle | Vitesse/Position |
| Protocole de Communication | RS485 ou CAN |
| Dimensions Globales | Φ69mm×46mm |
| Poids | 526g |
Définition de l'Interface
- COMMUTATEUR ID
- CAN/RS485
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation Négative |
| V- | Alimentation Négative |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Robot d'inspection
- Caméra portable
- LiDAR
- Pod stabilisateur
Manuels
Pour des questions concernant le câblage, l'intégration ou la documentation, contactez le support à [email protected] or visitez https://rcdrone.top/.
Détails

Conçu comme un servo FOC compact, le K7050 intègre le moteur et l'encodeur pour un contrôle de mouvement propre et de haute précision.
Une carte de pilote intégrée et un encodeur magnétique réduisent le câblage tout en gardant le moteur léger et axé sur le couple.

Un étiquetage clair de l'interface facilite le câblage de l'alimentation, de la communication CAN/RS485 et des connexions UART lors de l'intégration.
L'accord basé sur PC prend en charge la configuration, les tests et les mises à jour du firmware à travers les modes de contrôle de couple, de vitesse et de position.
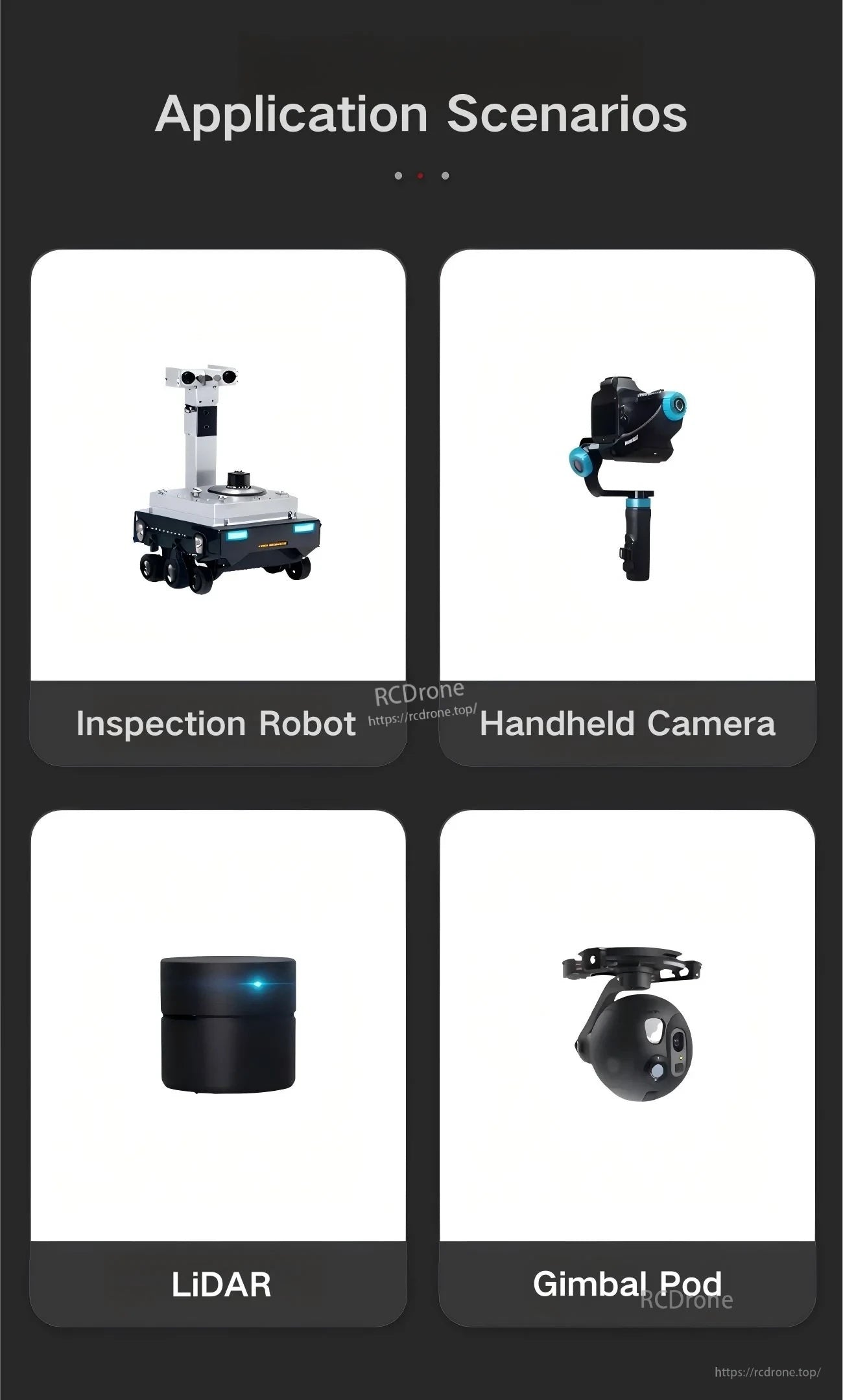
Les cas d'utilisation courants incluent les robots d'inspection mobile, les systèmes de caméra stabilisés, les plateformes LiDAR et les pods de cardan.
Related Collections

