

MUWEIDU K9050 Moteur FOC Servo, 24V Encodeur 18 bits, RS485/CAN, Contrôle Vitesse/Position (16T/35T)
MUWEIDU K9050 Moteur FOC Servo, 24V Encodeur 18 bits, RS485/CAN, Contrôle Vitesse/Position (16T/35T)
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU K9050 Moteur est un moteur à courant continu sans balais moteur servo FOC avec un design de pilote intégré (pilote intégré) et un encodeur magnétique. Il prend en charge le contrôle de la vitesse/position avec communication RS485 ou CAN, et inclut la surveillance de la température du moteur pour l'intégration système dans des projets de robotique et d'automatisation.
Caractéristiques clés
- Moteur à courant continu sans balais de la série K à vitesse moyenne à élevée ; moteurs servo
- Moteur servo FOC haute performance
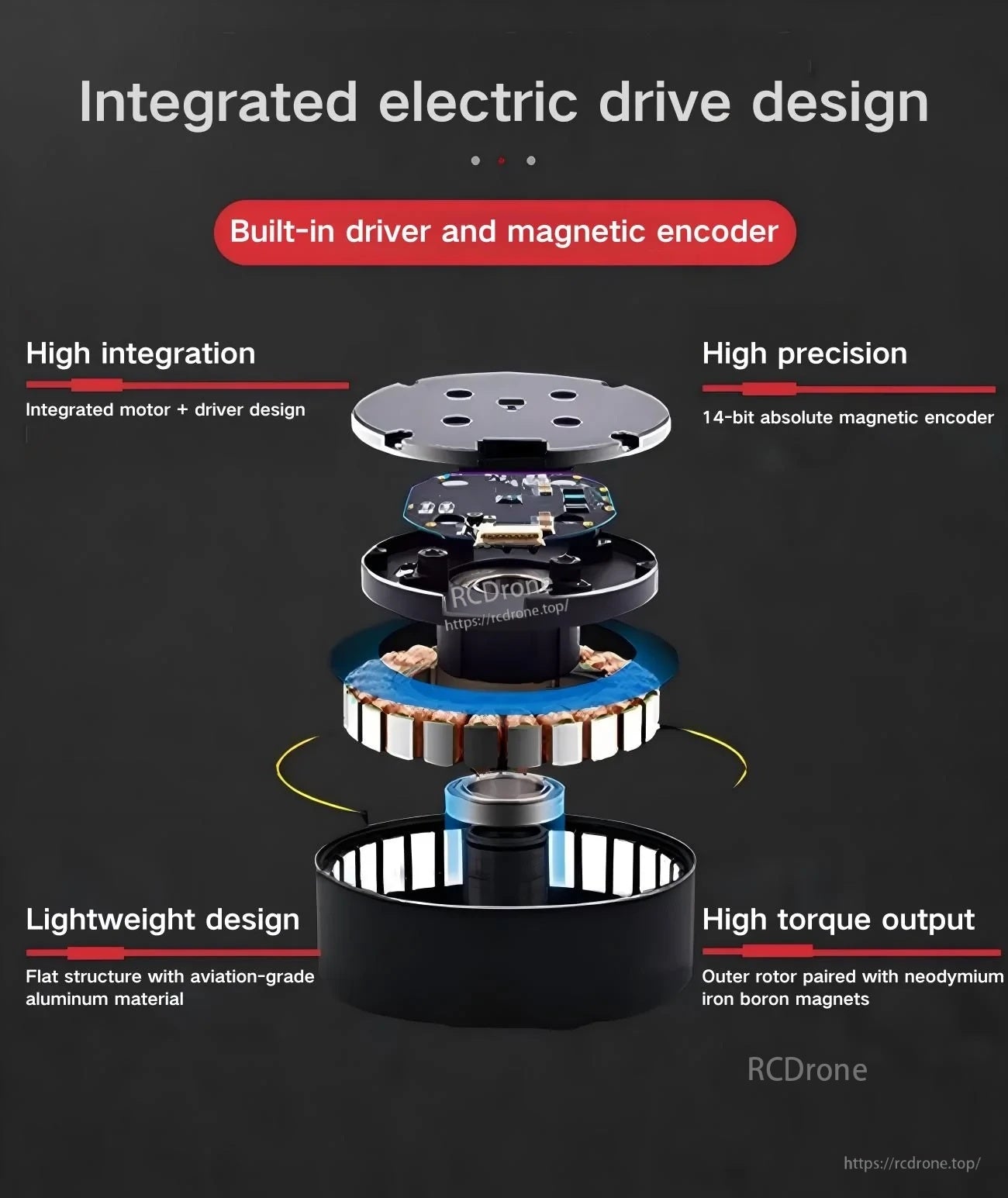
- Conception de conduite électrique intégrée : pilote et encodeur magnétique intégrés (moteur + pilote intégrés)
- Mise à niveau de la précision de l'encodeur notée : de 14 bits à 18 bits ; encodeur magnétique absolu à 18 bits à tour unique avec calibration unique (position zéro jamais perdue)
- Couple de cogging du moteur optimisé
- Entrée PWM prise en charge
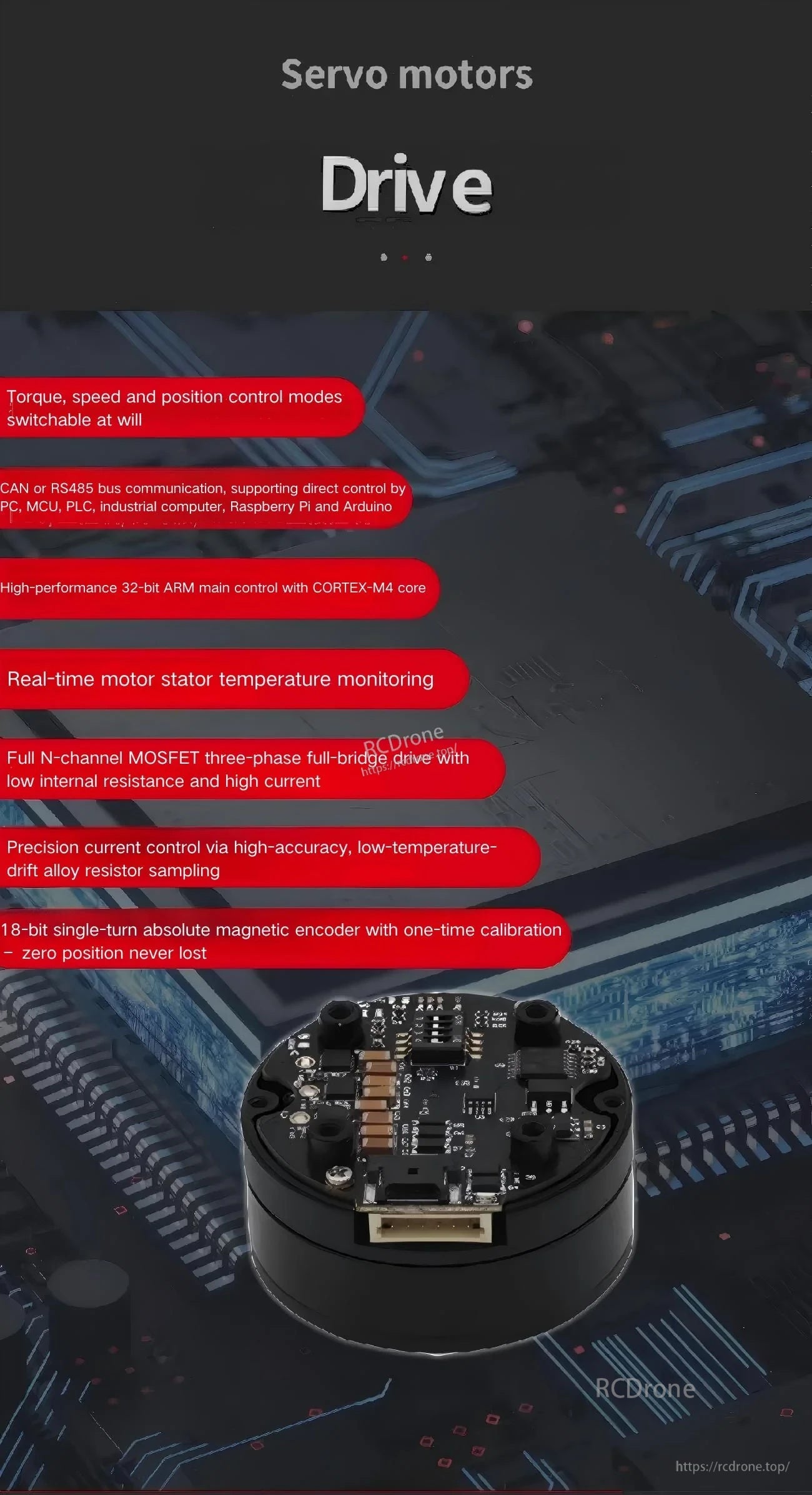
- Modes de contrôle de couple, de vitesse et de position commutables
- Communication par bus CAN ou RS485 ; compatible avec des plateformes de développement open-source incluant PC, MCU, PLC, ordinateur industriel, Raspberry Pi et Arduino
- Contrôle principal haute performance 32 bits avec cœur CORTEX-M4
- Surveillance en temps réel de la température du stator du moteur
- Pont complet à trois phases avec MOSFET N-channel complet avec faible résistance interne et courant élevé
- Contrôle de courant de précision via un échantillonnage de résistance en alliage à faible dérive de température
Spécifications
| Modèle | K9050 (16T/35T) |
| Tension nominale | 24V |
| Courant nominal | 7.45A / 3.46A |
| Puissance de pointe | 170W / 38W |
| Couple nominal | 2.42 N.m / 2.79 N.m |
| Couple de pointe | 4.5 N.m / 5.8 N.m |
| Vitesse évaluée | 490 tr/min / 130 tr/min |
| Encodeur | 18 bits |
| Inertie du rotor | 4656 gcm² |
| Surveillance de la température du moteur | OUI |
| Modes de contrôle | Vitesse/Position |
| Protocole de communication | RS485 ou CAN |
| Dimensions globales | Φ89mm x 53mm |
| Poids | 963 g |
Interface (Notes de broches du connecteur CAN/RS485)
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | Signal GND |
Également étiqueté : INTERUPTEUR D'IDENTIFICATION et CAN/RS485 .
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Robot d'inspection
- Caméra portable
- LiDAR
- Pod stabilisateur
Manuels / Documents
Pour des vérifications de compatibilité ou un support d'intégration (câblage RS485/CAN, réglage des paramètres et sélection du mode de contrôle), contactez le support à https://rcdrone.top/ ou envoyez un e-mail à [email protected] .
Détails

Un moteur servo 24V FOC compact conçu pour la robotique et l'automatisation, avec électronique de commande intégrée et retour d'encodeur absolu.
La construction intégrée du moteur + du driver simplifie le câblage et maintient le actionneur léger pour des installations compactes.
Alternez entre le contrôle de couple, de vitesse et de position, et connectez-vous via CAN ou RS485 avec surveillance de température intégrée pour une intégration plus sûre.

Étiquetage clair des broches pour le câblage du bus CAN/RS485, l'alimentation, les lignes UART et l'interrupteur ID intégré pour prendre en charge les configurations multi-nœuds.
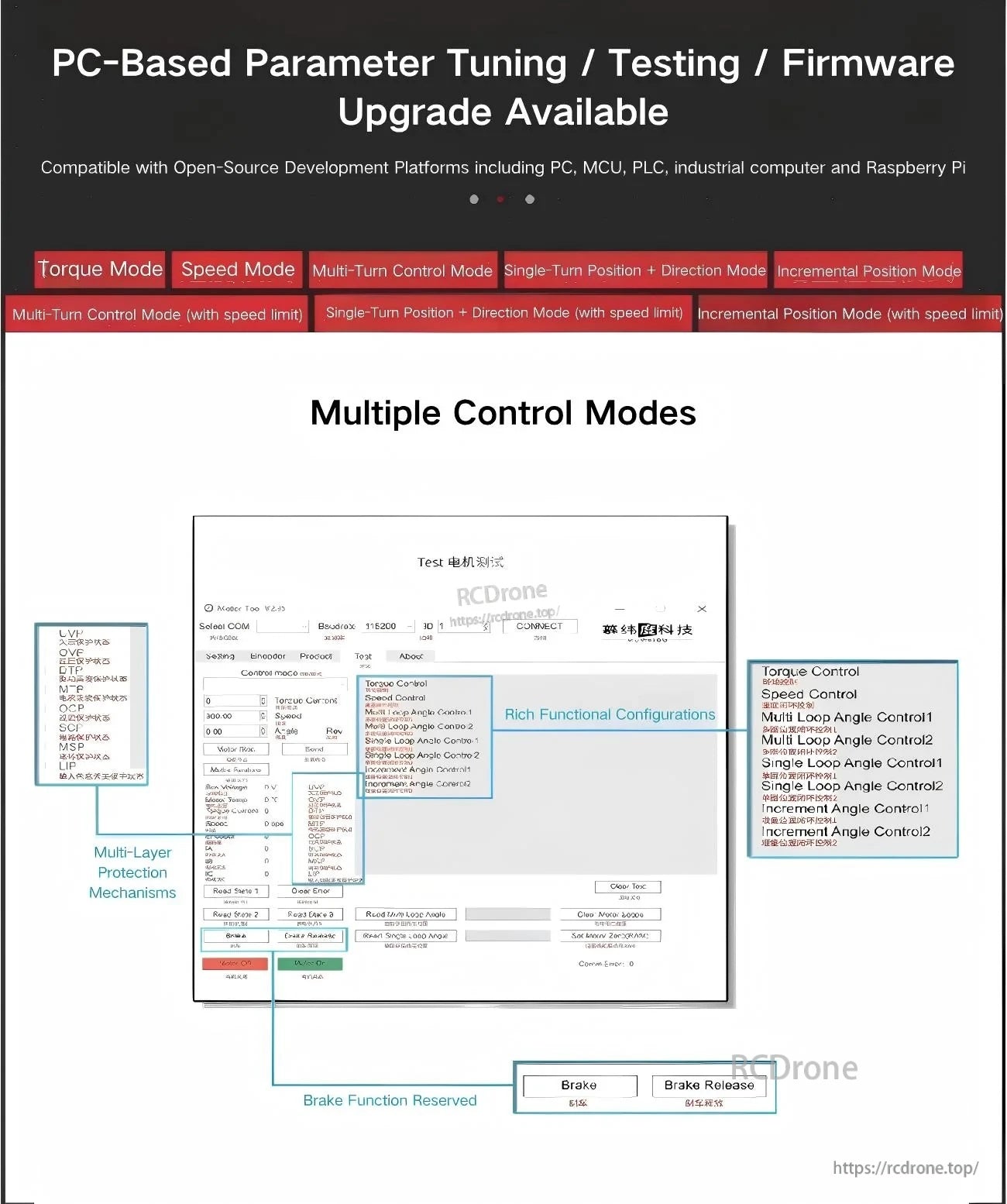
Le support logiciel PC aide à accélérer la mise en service avec l'ajustement des paramètres, les tests et les mises à jour du firmware à travers plusieurs modes de contrôle.
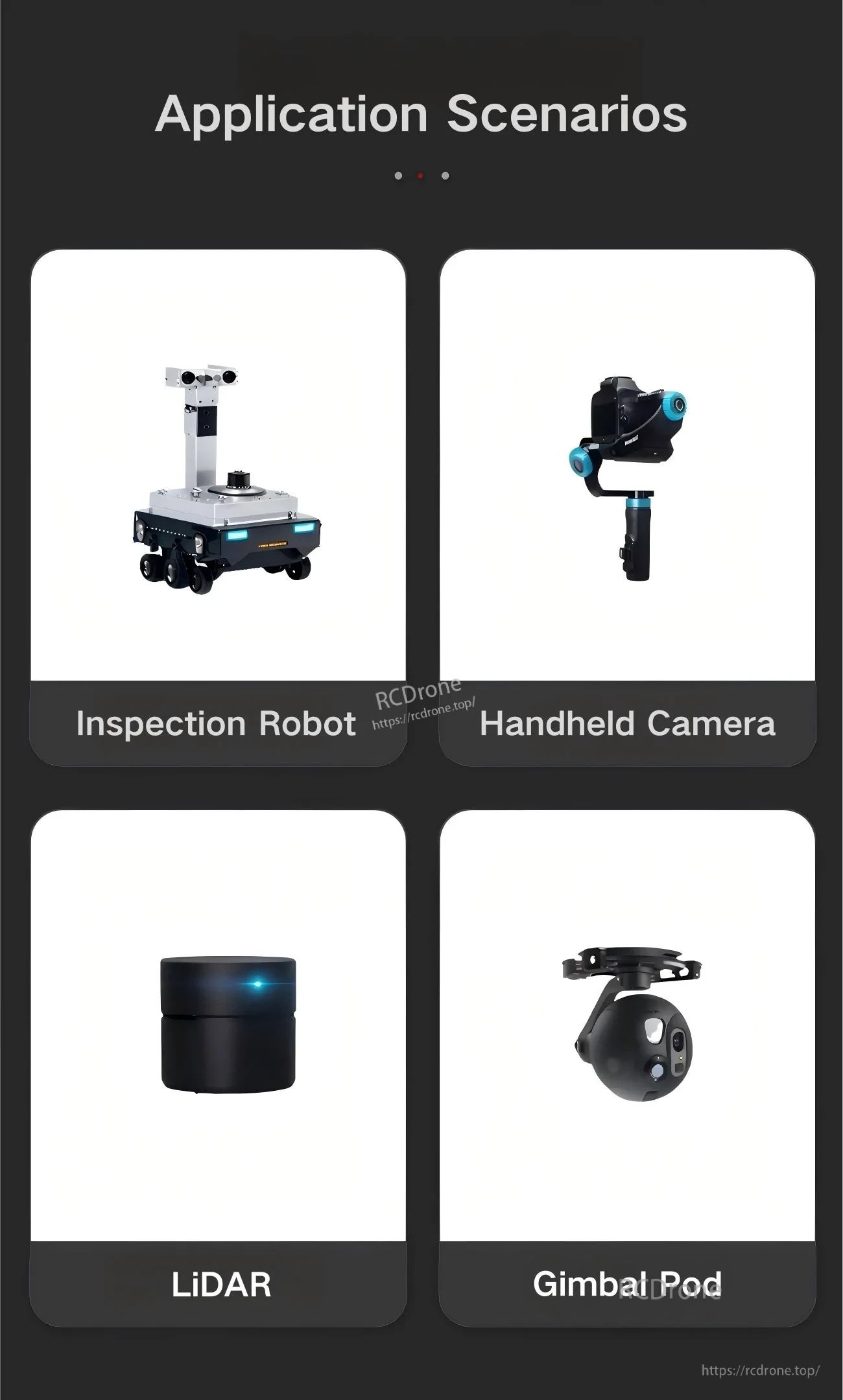
Conçu pour des projets de contrôle de mouvement allant des robots d'inspection mobiles aux plateformes de caméras et de capteurs stabilisés.
Related Collections

