

MUWEIDU L3526 Moteur 12V Mini Servo, Encodeur 15 bits, Contrôle de vitesse/position RS485 pour robotique
MUWEIDU L3526 Moteur 12V Mini Servo, Encodeur 15 bits, Contrôle de vitesse/position RS485 pour robotique
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU L3526 Moteur est un mini moteur servo dans une série de moteurs à courant continu sans balais à basse vitesse et haute précision, conçu pour des applications de conduite électrique intégrées nécessitant un fonctionnement stable et fluide. Il prend en charge le contrôle de la vitesse/position et utilise la communication RS485.
Caractéristiques clés
- Série de moteurs à courant continu sans balais à basse vitesse & haute précision (mini moteurs servo)
- Fonctionnement stable & fluide
- Surveillance de la température du moteur : OUI
- Répond aux exigences de contrôle de position à basse vitesse et haute précision
- Conception à rotor externe multi-étagée aplatie offrant un couple plus élevé, idéale pour les applications à espace limité
- Structure sans balais combinée à des roulements haute performance assure une rotation plus fluide et une durée de vie plus longue
- Résistances en alliage à haute précision et faible dérive thermique réalisent un échantillonnage et un contrôle de courant précis
- Le pilote complet à pont complet triphasé N-channel présente une faible résistance interne et une sortie de courant élevée
- Soutient le passage sans couture entre les modes de contrôle de couple en boucle ouverte, de vitesse et de position
Spécifications
| Modèle | L3526 |
| Tension nominale | 12V |
| Courant nominal | 0.79A |
| Puissance de crête | 6.4W |
| Couple nominal | 0.05 N.m |
| Couple de crête | 0.13 N.m |
| Vitesse évaluée | 1250 tr/min |
| Encodeur | 15 bits |
| Inertie du rotor | 58 gcm² |
| Surveillance de la température du moteur | OUI |
| Modes de contrôle | Vitesse/Position |
| Protocole de communication | RS485 |
| Dimensions globales | Φ35 mm × 26 mm |
| Poids | 50 g |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels
Pour des conseils sur la sélection, un support d'intégration ou des questions de documentation, contactez [email protected] or visitez https://rcdrone.top/ .
Détails

Les servomoteurs miniatures compacts sont conçus pour des mouvements à basse vitesse et de haute précision où un fonctionnement fluide et stable est essentiel.

Un design de moteur intégré combine une structure à rotor externe, des roulements de qualité et une détection de courant précise pour un contrôle de couple optimal.
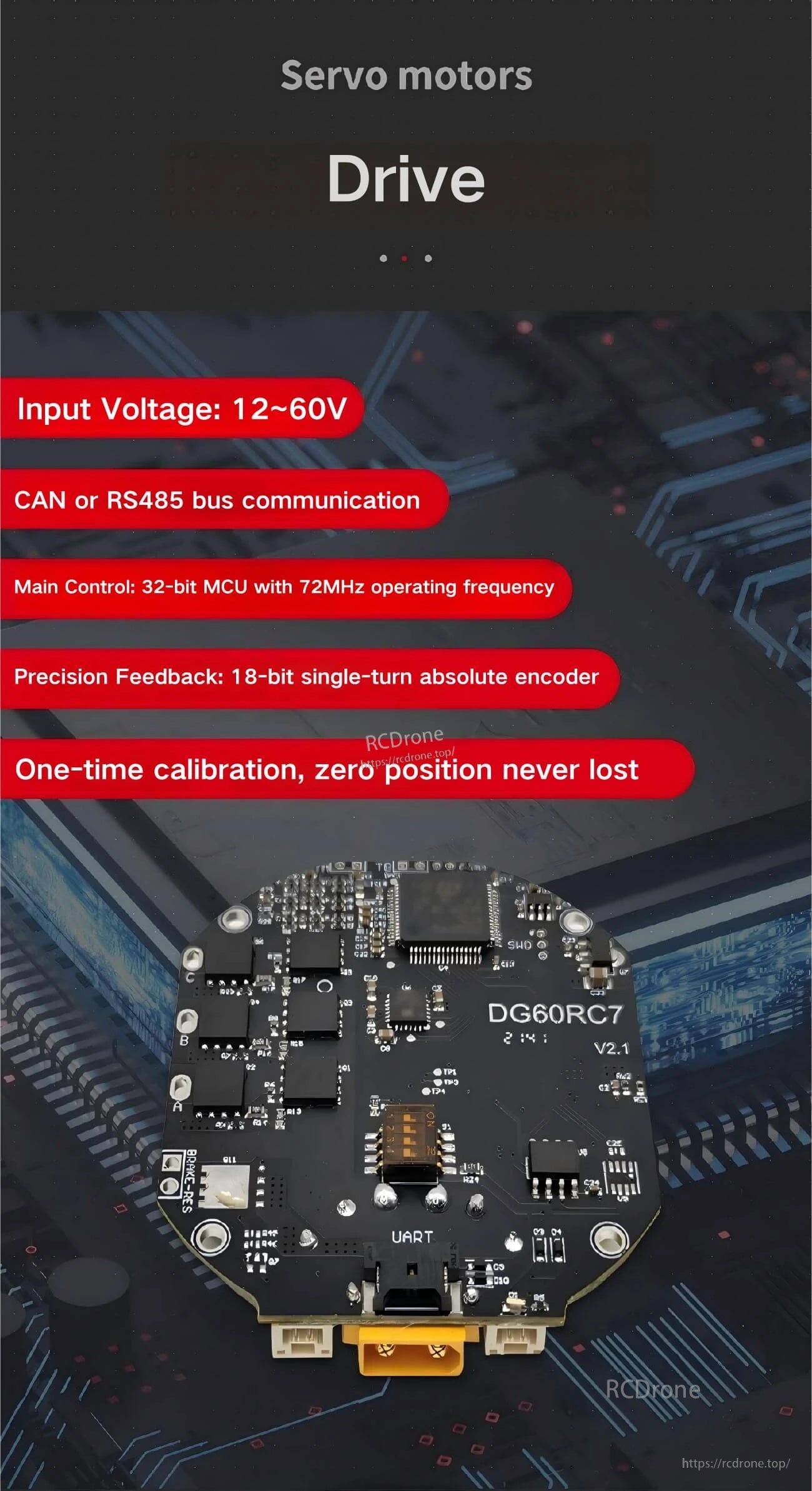
La communication RS485 et l'électronique de contrôle embarquée prennent en charge les commandes de vitesse/position avec retour d'encodeur pour un contrôle de mouvement en boucle fermée.

Le câblage reste simple avec un port CAN/RS485 étiqueté, un interrupteur ID pour la configuration du bus, et des définitions de broches claires pour l'alimentation et le signal.
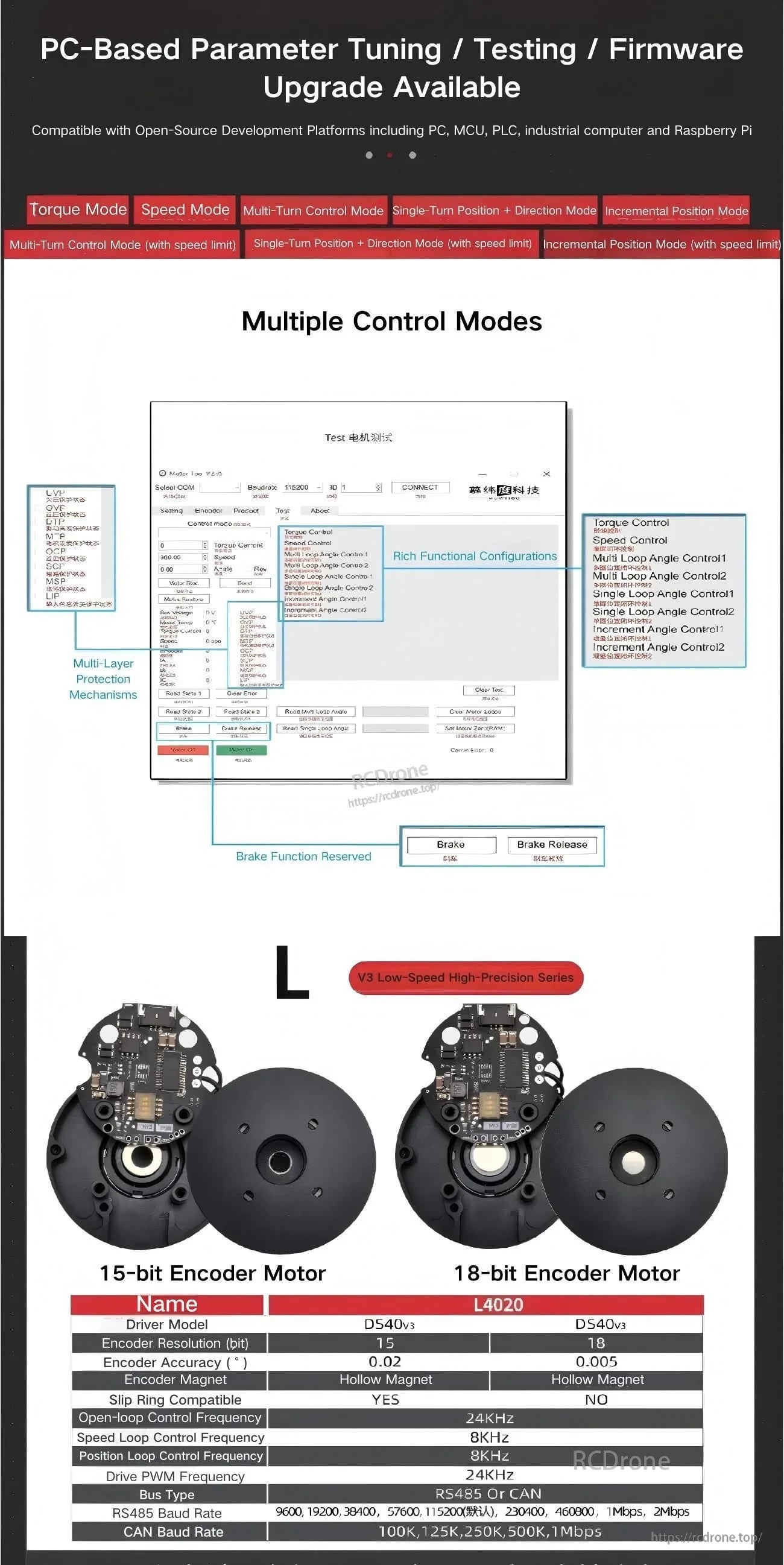
Des outils basés sur PC permettent le réglage des paramètres, les tests et les mises à jour du firmware, avec plusieurs modes de contrôle disponibles pour différentes tâches de mouvement.

Related Collections

