

MUWEIDU L4030 Moteur Brushless DC Servo 16V 160tr/min 0,25N.m RS485/CAN Encodeur 15/18 bits
MUWEIDU L4030 Moteur Brushless DC Servo 16V 160tr/min 0,25N.m RS485/CAN Encodeur 15/18 bits
MUWEIDU
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU Le moteur L4030 est un moteur à courant continu sans balais à basse vitesse et haute précision moteur servo avec des fonctionnalités de conduite électrique intégrées pour le contrôle de la vitesse/position. Il prend en charge la communication RS485 ou CAN et est conçu pour des applications de mouvement compactes et à espace limité nécessitant un fonctionnement stable et fluide.
Caractéristiques clés
- Positionnement de la série : “Série de moteurs à courant continu sans balais à basse vitesse et haute précision”
- Mini moteurs servo ; conception à arbre creux
- Fonctionnement stable & et fluide
- Certifié CE
- Précision intégrée élevée
- Construction légère ; performance de couple élevée
- Répond aux exigences de contrôle de position à basse vitesse et haute précision
- MCU 32 bits haute performance permettant à la série MS d'être entièrement compatible avec toutes les commandes de la série MF
- Feuilles d'acier au silicium de qualité supérieure et aimants permanents haute performance résistants à haute température adoptés comme matériaux de base du moteur
- Conception à rotor externe multi-étagée aplatie offrant un couple plus élevé pour des applications à espace contraint
- Structure sans balais avec roulements haute performance pour une rotation plus fluide et une durée de vie plus longue
- Résistances en alliage à haute précision et à faible dérive thermique pour un échantillonnage et un contrôle de courant précis
- Contrôle complet en pont complet triphasé N-channel avec faible résistance interne et sortie de courant élevée
- Prend en charge le passage sans couture entre les modes de contrôle de couple en boucle ouverte, de vitesse et de position
- Calibration unique ; « position zéro jamais perdue »
Spécifications techniques
| Modèle | L4030 |
| Tension nominale | 16V |
| Courant nominal | 1.1A |
| Puissance de crête | 5.5W |
| Couple nominal | 0.25N.m |
| Couple de crête | 0.35N.m |
| Vitesse nominale | 160rpm |
| Encodeur | 15bit ou 18bit |
| Inertie du rotor | 105gcm^2 |
| Surveillance de la température du moteur | OUI |
| Modes de contrôle | Vitesse/Position |
| Protocole de communication | RS485 ou CAN |
| Dimensions globales | Phi39.6mm x 33mm |
| Poids | 112g |
Définition de l'interface
- COMMUTATEUR ID
- CAN/RS485
| Interface | Remarque |
|---|---|
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation négative |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Scénarios d'application
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
- Caméra à 360 degrés
- Caméra portable
- LiDAR
- Stabilisateur
Logiciel PC / Fonctions de contrôle (comme indiqué)
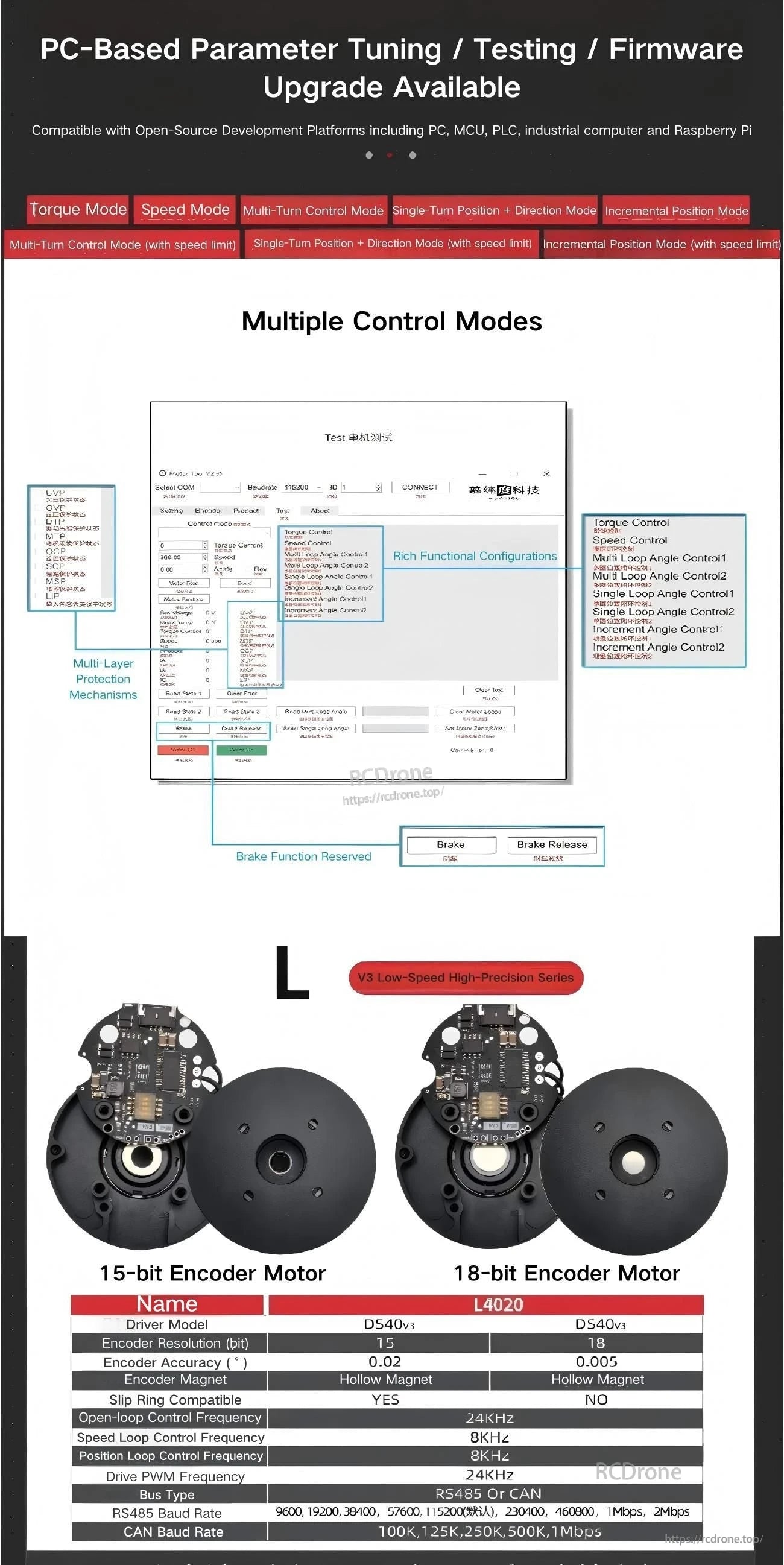
- Réglage des paramètres / Test / Mise à jour du firmware basé sur PC disponible
- Compatible avec des plateformes de développement open-source incluant PC, MCU, PLC, ordinateur industriel et Raspberry Pi
- Modes de contrôle multiples : Mode couple ; Mode vitesse ; Mode de contrôle multi-tours ; Mode position + direction à un tour ; Mode position incrémentale
- Avec options de limite de vitesse pour : Mode de contrôle multi-tours ; Mode position + direction à un tour ; Mode position incrémentale
- Mécanismes de protection multicouches
- Fonction de frein réservée (Frein / Libération du frein)
Documents
Pour une assistance technique, des questions d'intégration ou de l'aide sur la documentation, contactez [email protected] or visitez https://rcdrone.top/.
Détails

Plateforme de moteur servo mini compact conçue pour un mouvement à basse vitesse et haute précision dans des espaces restreints.

Les électroniques de conduite intégrées supportent un contrôle de position stable à basse vitesse et haute précision avec des matériaux et un design de moteur efficaces.
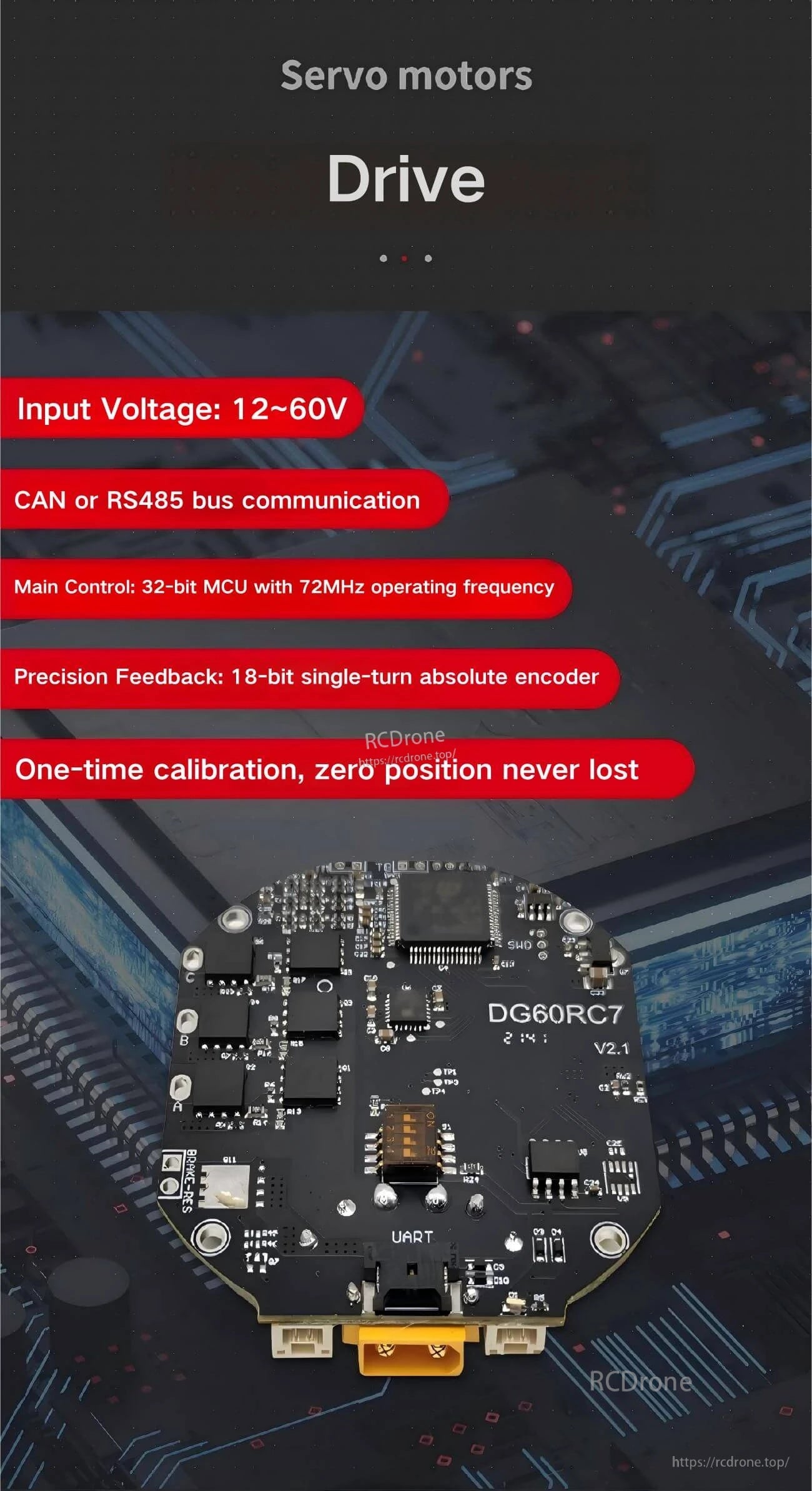
Choisissez la communication CAN ou RS485 et le retour d'encodeur absolu pour un contrôle de vitesse et de position réactif.

Le marquage clair de l'interface simplifie le câblage pour l'alimentation, les lignes CAN/RS485 et les connexions de signal UART.
Les outils PC permettent le réglage des paramètres, les tests et les mises à jour du firmware à travers plusieurs modes de contrôle et configurations d'encodeur.

Related Collections

