

MUWEIDU L5020 Moteur Mini Servo 16V 500tr/min 0,18N.m RS485/CAN Encodeur 15 bits/18 bits 99g
MUWEIDU L5020 Moteur Mini Servo 16V 500tr/min 0,18N.m RS485/CAN Encodeur 15 bits/18 bits 99g
MUWEIDU
Prix habituel
$180.00 USD
Prix habituel
Prix promotionnel
$180.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
MUWEIDU Le moteur L5020 est un mini moteur servo conçu pour un contrôle de position à basse vitesse et haute précision. Il prend en charge les modes de contrôle de vitesse/position et fournit une communication RS485 ou CAN, avec un retour d'information d'encodeur optionnel de 15 bits ou 18 bits et une surveillance de la température du moteur.
Caractéristiques clés
- Série de moteurs à courant continu sans balais à haute précision et basse vitesse&
- Moteurs servo mini
- Conception à arbre creux
- Fonctionnement stable et fluide
- Certifié CE
- Précision intégrée élevée
- Construction légère ; performance de couple élevée
- Conçu selon des normes ultra-élevées
- Répond aux exigences de contrôle de position à basse vitesse et haute précision
- Des tôles en acier au silicium de qualité supérieure et des aimants permanents haute performance résistants à haute température sont adoptés comme matériaux de base du moteur
- Conception à rotor extérieur multi-étapes aplatie offrant un couple plus élevé, idéale pour les applications à espace contraint
- Structure sans balais combinée à des roulements haute performance assure une rotation plus fluide et une durée de vie plus longue
- Résistances en alliage à haute précision et à dérive de température faible réalisent un échantillonnage et un contrôle de courant précis
- Plein N-channel trois phases pont complet présente une faible résistance interne et une haute sortie de courant
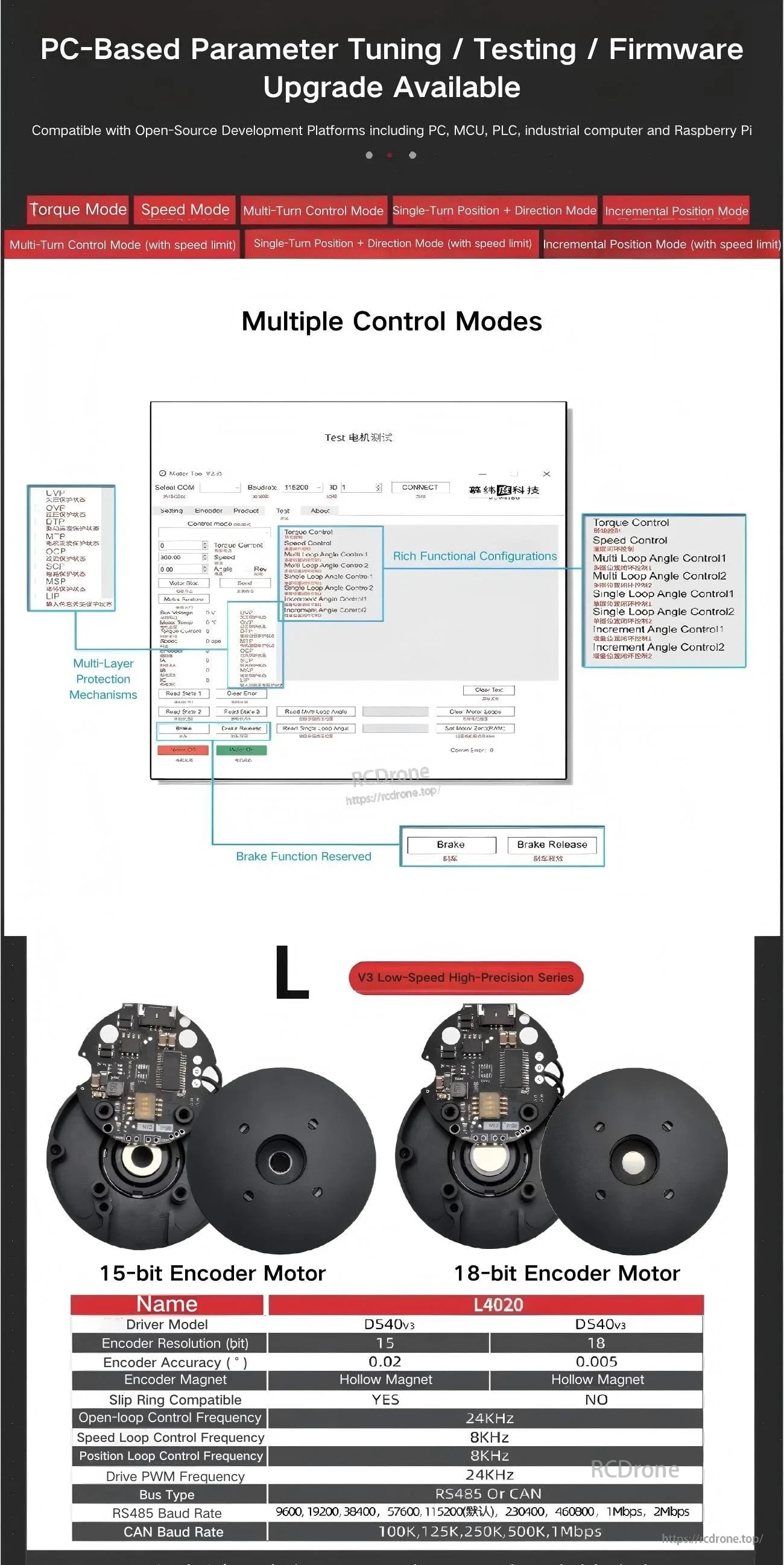
- Supporte le passage sans couture entre les modes de contrôle de couple en boucle ouverte, de vitesse et de position
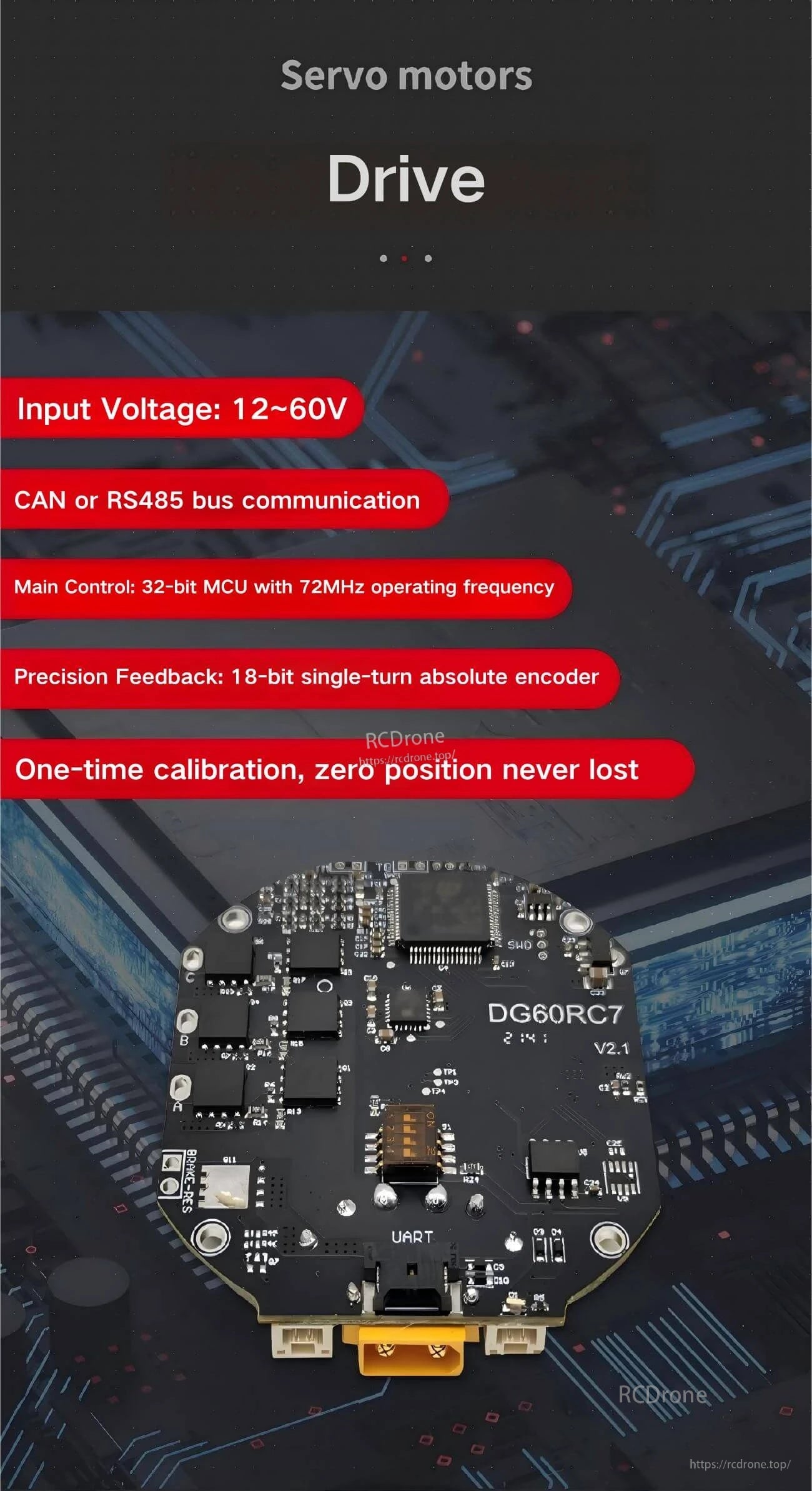
- Mise en avant du drive : Tension d'entrée 12~60V ; Communication bus CAN ou RS485 ; Contrôle principal : MCU 32 bits avec fréquence d'opération de 72MHz ; Retour d'information de précision : encodeur absolu à un tour de 18 bits ; Calibration unique, position zéro jamais perdue
Scénarios d'application
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Spécifications
| Modèle | L5020 |
| Tension nominale | 16V |
| Courant nominal | 0.8A |
| Puissance de crête | 6.7W |
| Couple nominal | 0.18N.m |
| Couple de crête | 0.28N.m |
| Vitesse nominale | 500rpm |
| Encodeur | 15bit ou 18bit |
| Inertie du rotor | 136gcm^2 |
| Surveillance de la température du moteur | OUI |
| Modes de contrôle | Vitesse/Position |
| Protocole de communication | RS485 ou CAN |
| Dimensions globales | Φ49mm×23.9mm |
| Poids | 99g |
Interfaces
- INTERUPTEUR D'IDENTIFICATION
- CAN/RS485
| B/L | RS485-B ou CAN-L |
| A/H | RS485-A ou CAN-H |
| V- | Alimentation Négative |
| V- | Alimentation Négative |
| V+ | Alimentation Positive |
| V+ | Alimentation Positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND Signal |
Pour le support avant-vente et l'intégration, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected].
Manuels
Détails




Related Collections

