Moteur servo à entraînement direct MyActuator H-50-15, 24V CAN Bus, 2500 tr/min, couple de pointe 0,9N·m, encodeur 17 bits, conception à arbre creux
Moteur servo à entraînement direct MyActuator H-50-15, 24V CAN Bus, 2500 tr/min, couple de pointe 0,9N·m, encodeur 17 bits, conception à arbre creux
MyActuator
Impossible de charger la disponibilité du service de retrait
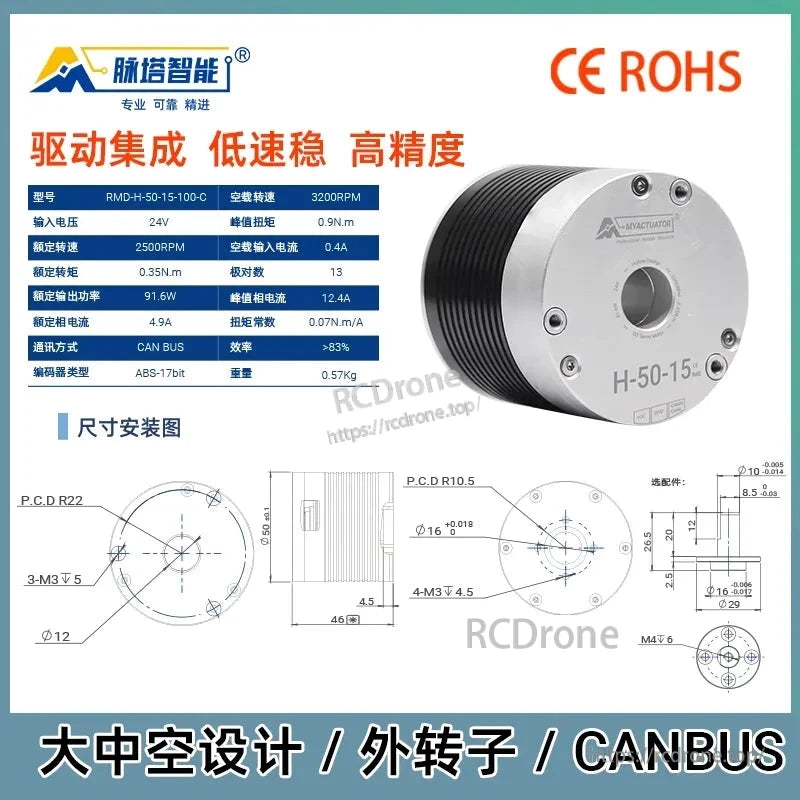
Le MyActuator H-50-15 est un module moteur à rotor externe à entraînement direct, compact et de haute précision conçu pour la robotique, les stabilisateurs et d'autres systèmes d'automatisation nécessitant un contrôle de mouvement fluide, une densité de couple élevée et une communication CAN Bus. Avec un design à arbre creux, il est idéal pour les applications nécessitant un routage de câbles ou une intégration mécanique légère.
Présentation
-
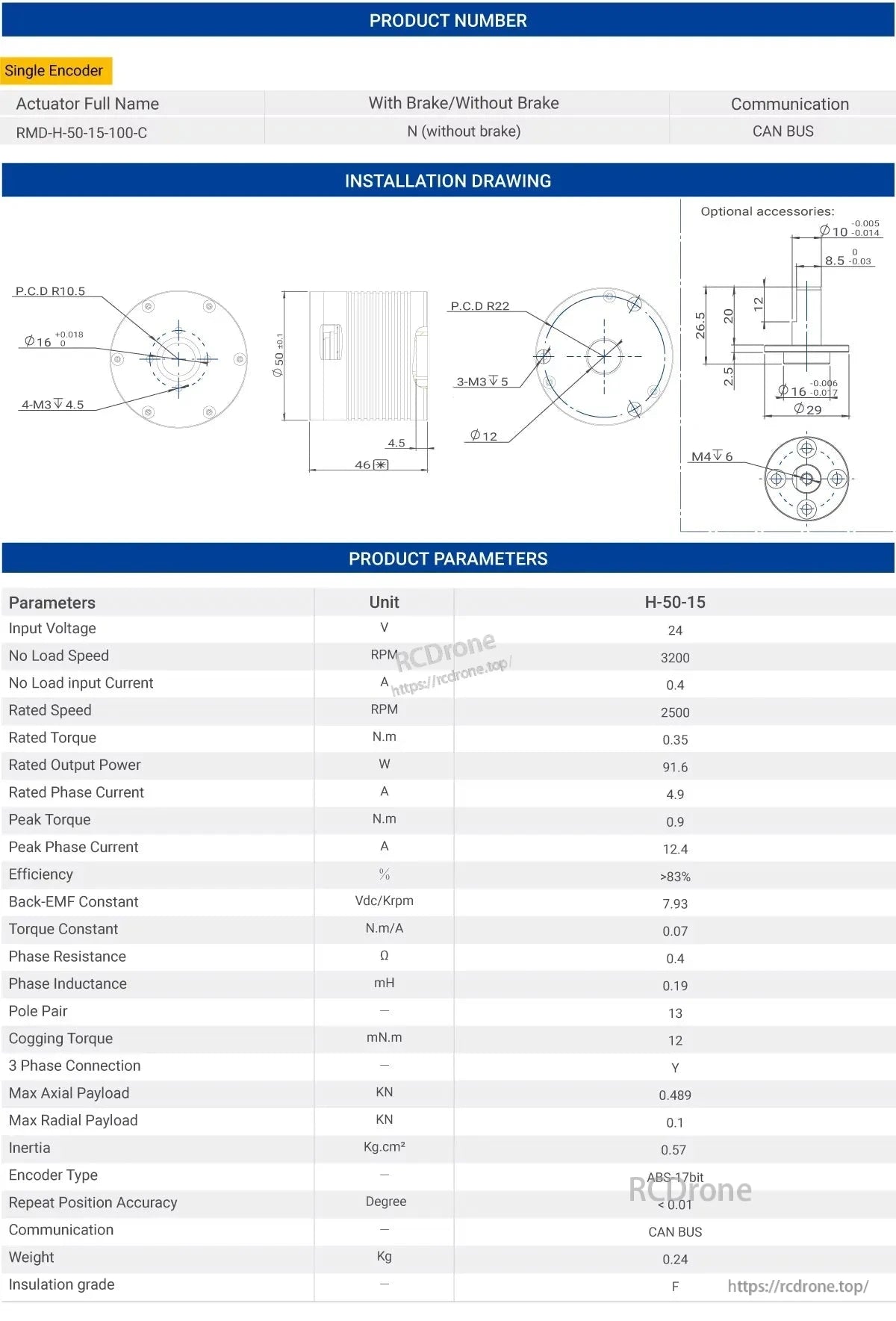
Modèle: RMD-H-50-15-100-C (Sans Frein, Encodeur Unique)
-
Tension d'Entrée: 24V DC
-
Vitesse Nominale: 2500 RPM
-
Couple Nominal: 0.35 N·m
-
Couple de Pointe: 0.9 N·m
-
Communication: CAN Bus
-
Poids: 0.24 kg
-
Dimensions: Ø50 mm × 46 mm
Caractéristiques clés
-
Contrôle de haute précision: Équipé d'un encodeur ABS 17 bits offrant une précision de répétition de position de <0.01° pour un retour d'information de mouvement précis.
-
Haute efficacité: Fonctionne avec des niveaux d'efficacité supérieurs à 83 % pour des performances optimisées et une réduction des pertes d'énergie.
-
Compact et léger: Avec un poids de seulement 0.24 kg et une taille compacte de 50 mm × 46 mm, il s'intègre parfaitement dans des conceptions à espace limité.
-
Contrôle et entraînement intégrés: Prend en charge la communication CAN Bus pour un câblage simple et une intégration facile avec les contrôleurs.
-
Applications polyvalentes: Parfait pour les bras robotiques, les robots quadrupèdes, les stabilisateurs et d'autres systèmes automatisés.
Spécifications techniques
| Paramètre | Valeur |
|---|---|
| Tension d'entrée | 24 V |
| Vitesse à vide | 3200 RPM |
| Vitesse nominale | 2500 RPM |
| Courant d'entrée à vide | 0.4 A |
| Puissance de sortie nominale | 91.6 W |
| Courant de phase nominal | 4.9 A |
| Courant de phase de pointe | 12.4 A |
| Couple nominal | 0.35 N·m |
| Couple de pointe | 0.9 N·m |
| Efficacité | >83% |
| Constante de couple | 0.07 N·m/A |
| Constante de contre-EMF | 7.93 Vdc/Krpm |
| Résistance de phase | 0.4 Ω |
| Inductance de phase | 0.19 mH |
| Paires de pôles | 13 |
| Couple de cogging | 12 mN·m |
| Inertie | 0.57 Kg·cm² |
| Type d'encodeur | ABS-17bit |
| Précision de répétition de position | <0.01° |
| Protocole de communication | CAN Bus |
| Poids | 0.24 kg |
| Classe d'isolation | F |
Applications
-
Bras robotiques pour l'automatisation de précision
-
Robots quadrupèdes nécessitant des actionneurs compacts et à haute efficacité
-
Systèmes de cardan pour une imagerie stable et la capture vidéo
-
Automatisation et plateformes industrielles exigeant un couple fiable et un mouvement fluide
Contenu de l'emballage
-
1 × Motoréducteur à entraînement direct MyActuator H-50-15
-
1 × Câble d'alimentation et de communication CAN
Détails
Motoréducteur MyActuator H-50-15 : 24V, 2500 RPM, 0.35 N.m couple, CAN BUS.Encodeur ABS-17 bits simple, &précision <0.01°, 0.24 kg, classe d'isolation F.
Related Collections