







MyActuator RH-17 Moteur d’axe robotique harmonique creux – Couple de pointe 54N·m, rapport de réduction 100:1, EtherCAT & CAN BUS, double encodeur ABS-17BIT
MyActuator RH-17 Moteur d’axe robotique harmonique creux – Couple de pointe 54N·m, rapport de réduction 100:1, EtherCAT & CAN BUS, double encodeur ABS-17BIT
MyActuator
Impossible de charger la disponibilité du service de retrait
Aperçu
Le MyActuator RH-17 Hollow Harmonic Robot Joint Motor est un actionneur haute performance conçu pour des applications robotiques avancées. Avec un rapport de réduction de 100:1, un couple de pointe de 54 N·m et un couple nominal de 35 N·m, il garantit un fonctionnement précis, stable et puissant. Doté de communication EtherCAT et CAN BUS, d'un système d'encodeur ABS-17BIT double et de roulements à rouleaux croisés, ce moteur offre une précision de contrôle et une durabilité exceptionnelles. Son design creux compact (Ø80 mm × 90,2 mm) et son poids de 1,11 kg le rendent idéal pour les bras robotiques, les robots collaboratifs et les systèmes d'automatisation nécessitant une densité de couple élevée et un contrôle de mouvement précis.
Caractéristiques clés
-
Couple élevé & puissance : Couple nominal de 35 N·m et couple de pointe de 54 N·m pour des applications exigeantes.
-
Communication Double: Prend en charge les protocoles EtherCAT et CAN BUS pour une intégration transparente et une réponse rapide.
-
Contrôle Précis: Double encodeurs ABS-17BIT pour l'entrée et la sortie offrant un positionnement précis avec <0.01° de répétabilité.
-
Compact & Léger: Conception à arbre creux avec un poids de seulement 1,11 kg, optimisé pour une densité de couple élevée.
-
Construction Robuste: Équipé de roulements à rouleaux croisés pour une capacité de charge et une durabilité accrues.
-
Fiabilité de Niveau Industriel: Classe d'isolation F, MCU haute vitesse et dissipation thermique optimisée pour des performances stables à long terme.
Paramètres du produit
| Paramètre | Valeur |
|---|---|
| Rapport de réduction | 100:1 |
| Tension d'entrée | 48 V |
| Vitesse à vide | 30 RPM |
| Courant à vide | 0.6 A |
| Vitesse nominale | 25 RPM |
| Couple nominal | 35 N·m |
| Puissance nominale | 91 W |
| Courant nominal | 4.7 A (rms) |
| Couple de pointe | 54 N·m |
| Courant de pointe | 7.4 A (rms) |
| Constante de contre-EMF | 19.2 Vdc/Krpm |
| Constante de couple du module | 7.4 N·m/A |
| Résistance de phase du moteur | 0.70 Ω |
| Inductance de phase du moteur | 0.47 mH |
| Paires de pôles | 10 |
| Jeu | <40 Arcsec |
| Charge radiale | Statique : 16.3 kN / Dynamique : 10.4 kN |
| Charge axiale | Statique : 78.2 kN / Dynamique : 20.8 kN |
| Inertie | N : 0.52 kg·m² / B : 0.56 kg·m² |
| Précision de répétition de position | <0.01° |
| Communication | CAN BUS & EtherCAT |
| Poids | Net : 1,11 kg / En boîte : 1,28 kg |
| Classe d'isolation | F |
Type d'encodeur
-
Encodeur d'entrée: ABS-17BIT
-
Encodeur de sortie: ABS-17BIT
-
Fournit un retour de mouvement précis pour une meilleure précision de contrôle.
Installation & Dimensions
-
Taille: Ø80 mm × 90,2 mm
-
Montage: Plusieurs trous traversants et interfaces filetées pour une installation sécurisée.
-
Arbre creux: Optimisé pour le passage de câbles dans les bras robotiques et les systèmes d'automatisation.
Interface & Câblage
-
Ports EtherCAT: Bornes IN et OUT pour le chaînage réseau.
-
Ports CAN BUS: CAN_H et CAN_L pour la communication.
-
Bornes d'alimentation: Connecteurs XT30 pour une alimentation fiable.
-
Connexions auxiliaires: Interfaces de batterie mémoire et de résistance de décharge pour des configurations de contrôle avancées.
Contenu du paquet
-
Actionneur: MyActuator Moteur à joint harmonique creux RH-17 ×1
-
A. Câble d'alimentation ×2
-
B. Câble de communication CAN BUS ×4
-
C. 120Ω Résistance de terminal ×1
-
C. Câble de communication EtherCAT ×2
-
E. Module de communication CAN BUS ×1 (Adaptateur USB-CAN gratuit inclus par commande)
Applications
-
Bras robotiques collaboratifs
-
Systèmes d'automatisation industrielle
-
Robots humanoïdes et quadrupèdes
-
Plateformes de mouvement de précision
-
Articulations robotiques autonomes pour la recherche et le développement
Détails

Le moteur de robot RH-17 offre un double encodeur, CAN BUS & EtherCAT, un rapport de réduction de 100:1, 48V, 35 N.m de couple, 91W de puissance. Disponible avec/sans frein. Comprend des dessins et des paramètres.
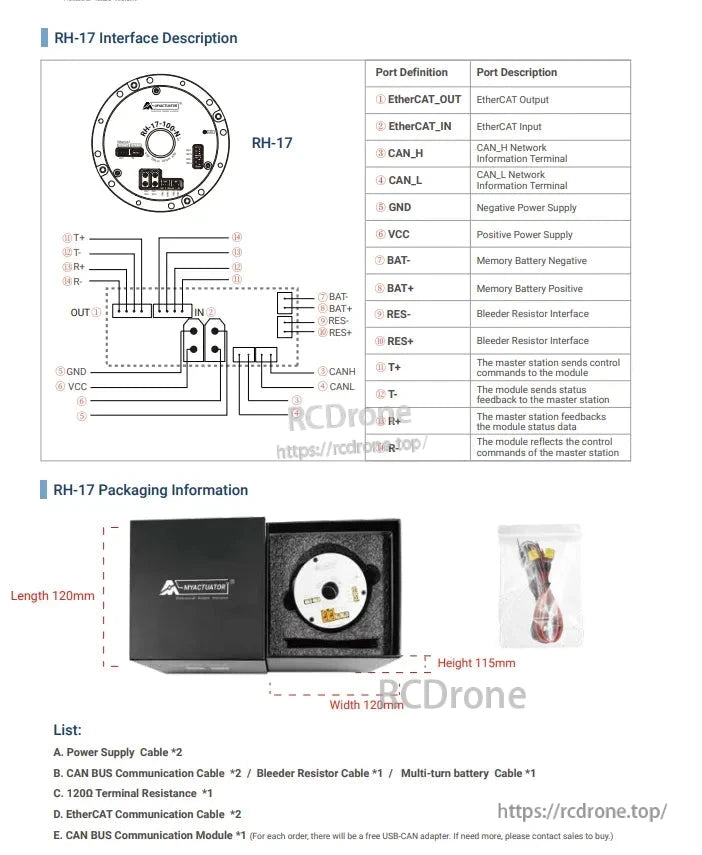
L'interface RH-17 comprend des connexions EtherCAT, CAN bus, alimentation et batterie. L'emballage contient des câbles, des résistances et un module. Dimensions : 120×120×115mm. La liste comprend des câbles d'alimentation, CAN, EtherCAT, des résistances et un module de communication.
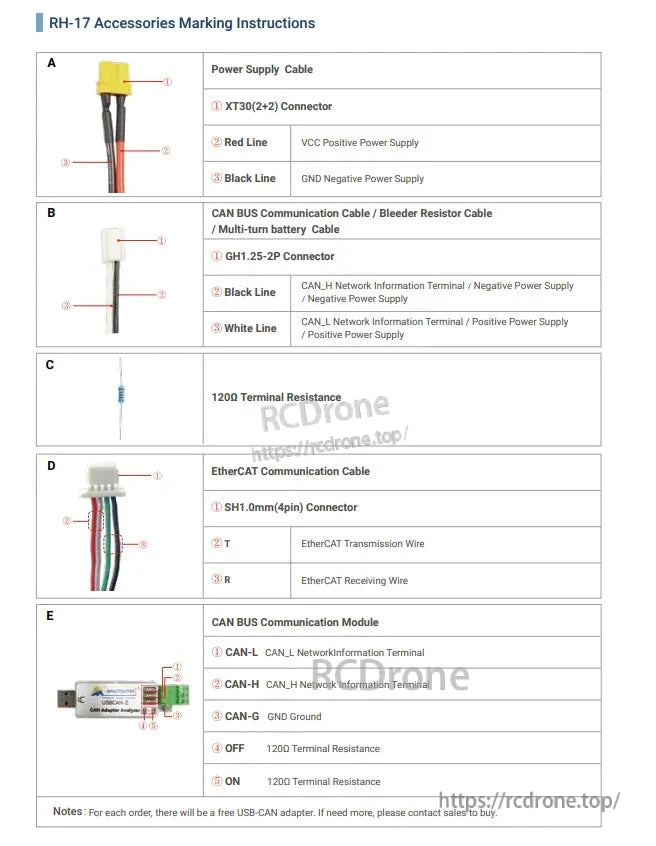
Les accessoires RH-17 incluent des câbles d'alimentation, CAN BUS, EtherCAT, une résistance de 120Ω et un module de communication. Les détails couvrent les connecteurs, les couleurs des fils, les fonctions et les résistances terminales pour chaque composant. Un adaptateur USB-CAN est inclus avec la commande.
Related Collections







