





MyActuator RH-20 Moteur d’axe robotique harmonique, rapport de réduction 100:1, couple de pointe 80N·m, EtherCAT & CAN Bus, double encodeur 17 bits
MyActuator RH-20 Moteur d’axe robotique harmonique, rapport de réduction 100:1, couple de pointe 80N·m, EtherCAT & CAN Bus, double encodeur 17 bits
MyActuator
Impossible de charger la disponibilité du service de retrait
Aperçu
Le MyActuator RH-20 Moteur d'Articulation Harmonique est un actionneur à entraînement harmonique haute performance conçu pour les articulations robotiques, l'automatisation industrielle et les systèmes de mouvement de précision. Avec un rapport de réduction de 100:1, un couple de pointe de 80N·m, un couple nominal de 50N·m, et une puissance nominale de 130W, cet actionneur offre des performances puissantes, stables et efficaces dans un format compact.
Équipé de protocoles de communication EtherCAT et CAN Bus et de double encodeurs absolus de 17 bits, le RH-20 garantit une précision de repositionnement exceptionnelle (<0.01°), ce qui le rend idéal pour les robots humanoïdes, les bras robotiques collaboratifs, les robots mobiles et d'autres applications de précision.
Caractéristiques Clés
-
Haute Puissance de Sortie – couple nominal de 50N·m, couple de pointe de 80N·m et puissance nominale de 130W pour des applications lourdes.
-
Contrôle de Précision – Les encodeurs ABS à double 17 bits offrent une précision de positionnement répétée de moins de 0,01°.
-
Communication Avancée – Prend en charge EtherCAT et CAN Bus pour un contrôle en temps réel rapide et fiable.
-
Protection Fiable – L'isolation de classe F garantit un fonctionnement sûr et stable lors d'une utilisation continue à haute charge.
-
Design Compact – Diamètre de 90 mm, hauteur de 97,4 mm et poids de seulement 1,75 kg pour une intégration sans faille dans des systèmes multi-axes.
-
Roulements Durables – Roulements à rouleaux croisés pour une capacité de charge radiale et axiale élevée et une longue durée de vie.
Spécifications techniques
Performance du moteur
| Paramètre | Unité | Valeur |
|---|---|---|
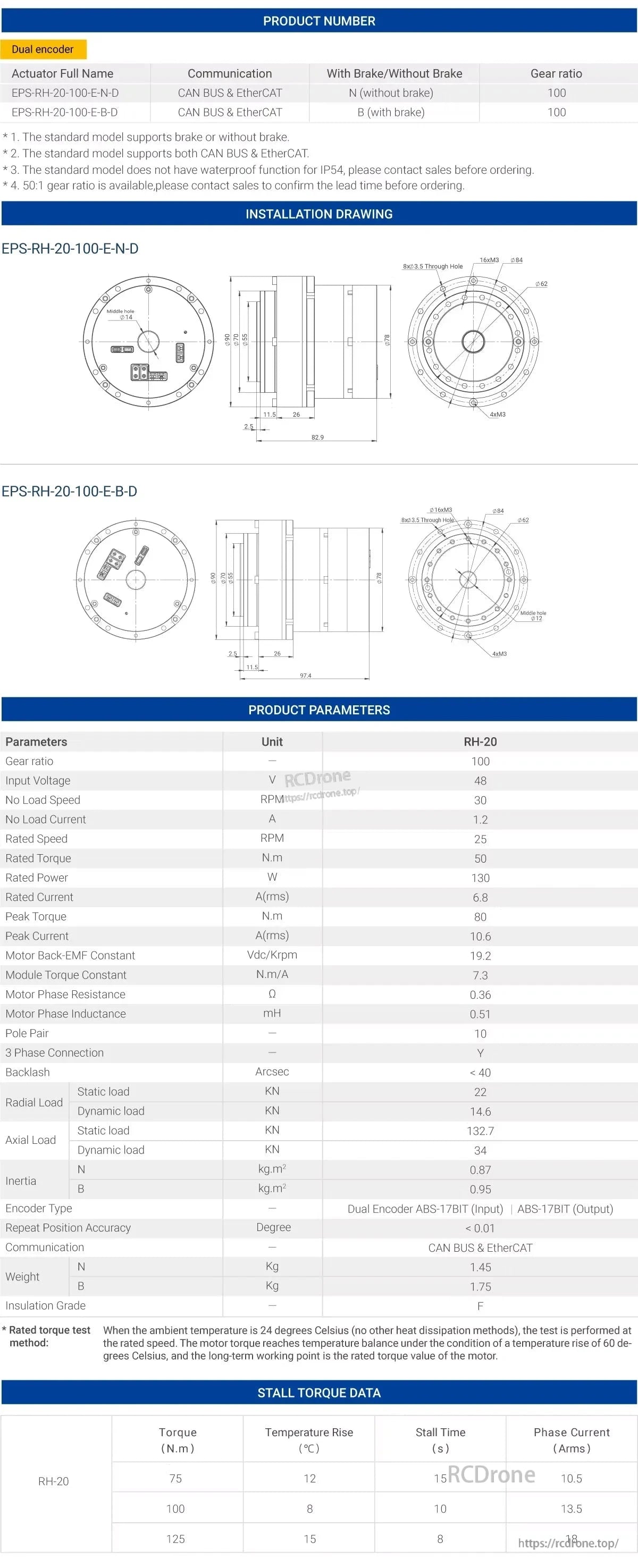
| Rapport de transmission | – | 100 |
| Tension d'entrée | V | 48 |
| Vitesse à vide | RPM | 30 |
| Courant à vide | A | 1.2 |
| Vitesse nominale | RPM | 25 |
| Couple nominal | N·m | 50 |
| Puissance nominale | W | 130 |
| Courant nominal | A (rms) | 6.8 |
| Couple de pointe | N·m | 80 |
| Courant de pointe | A (rms) | 10.6 |
| Constante de contre-EMF du moteur | Vdc/Krpm | 19.2 |
| Constante de couple du module | N·m/A | 7.3 |
| Résistance de phase du moteur | Ω | 0.36 |
| Inductance de phase du moteur | mH | 0.51 |
| Paires de pôles | – | 10 |
| Connexion triphasée | – | Y |
| Jeu | Arcsec | <40 |
Charge & Inertie
| Paramètre | Unité | Valeur |
|---|---|---|
| Charge radiale (Statique/Dynamique) | KN | 22 / 14.6 |
| Charge axiale (Statique/Dynamique) | KN | 132.7 / 34 |
| Inertie (N/B) | kg·m² | 0.87 / 0.95 |
| Poids (N/B) | Kg | 1.45 / 1.75 |
| Type d'encodeur | – | Dual ABS-17BIT (Entrée) / ABS-17BIT (Sortie) |
| Précision de répétition de position | Degré | <0.01 |
| Communication | – | EtherCAT & CAN Bus |
| Classe d'isolation | – | F |
Données de couple de blocage
| Couple (N·m) | Élévation de température (°C) | Temps de blocage (s) | Courant de phase (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Interface et Pinout
-
EtherCAT_IN / EtherCAT_OUT – Ports de communication haute vitesse
-
CAN_H / CAN_L – Terminaux de réseau CAN Bus
-
VCC / GND – Alimentation positive et négative
-
RES+ / RES- – Interface de résistance de décharge
-
BAT+ / BAT- – Connexion de batterie à mémoire multi-tour
-
T+, T-, R+, R- – Communication maître-esclave et retour d'état
Contenu de l'emballage
-
Câble d'alimentation ×2
-
Câble de communication CAN Bus ×4
Câble de résistance de saignement ×1
-
Câble de batterie multi-tours ×1
-
Résistance terminale de 120Ω ×1
-
Câble de communication EtherCAT ×2
-
Module de communication CAN Bus ×1 (Adaptateur USB-CAN)
Applications
-
Articulations de robot humanoïde
-
Bras robotiques collaboratifs
-
Robots mobiles et systèmes de conduite AGV
-
Plateformes de positionnement de précision
-
Équipements d'inspection automatisée et de laboratoire
Détails
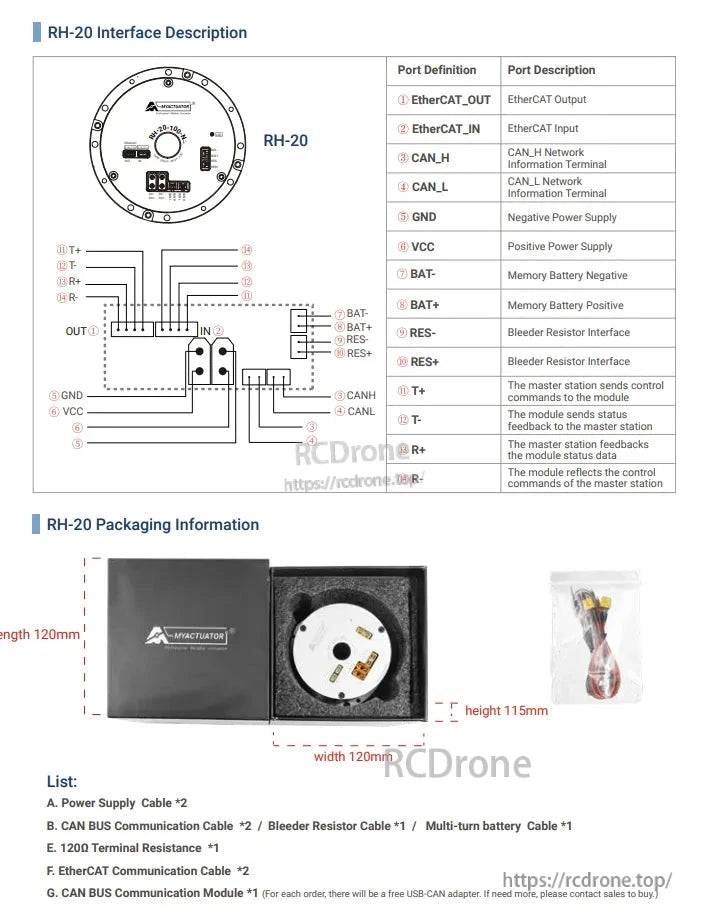
L'interface du moteur harmonique dispose de connexions EtherCAT, CAN bus, alimentation et batterie. Emballage : 120x120x115mm. Comprend des câbles, des résistances, des modules de communication pour la configuration.
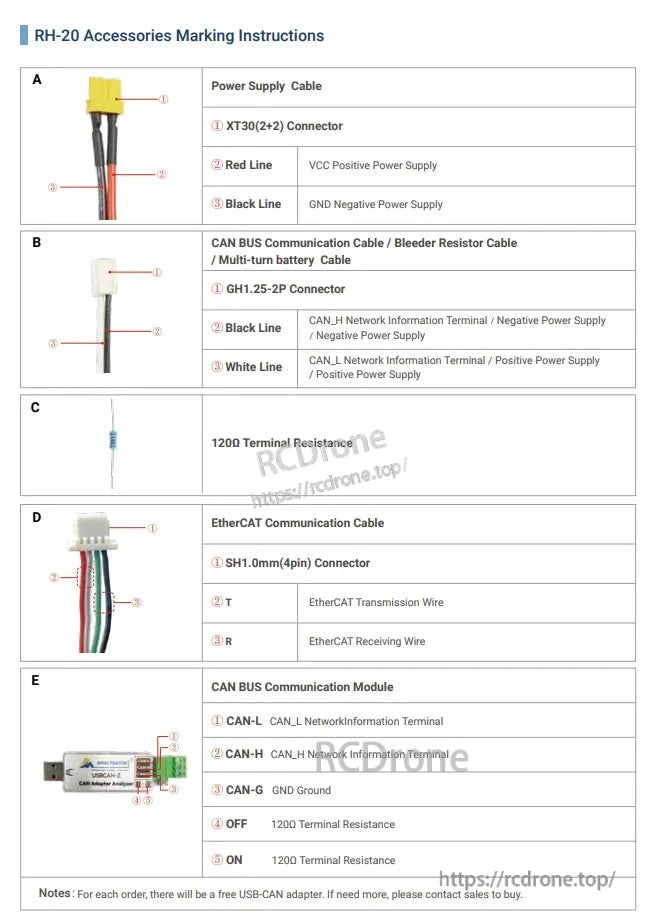
Les accessoires RH-20 incluent des instructions de marquage pour l'alimentation, les câbles CAN BUS, EtherCAT et le module de communication. Les détails couvrent les types de connecteurs, les couleurs des fils, les fonctions et la résistance des terminaux. Chaque commande comprend un adaptateur USB-CAN gratuit.
Related Collections





