




Actionneur servo MyActuator RMD-X12-320, moteur intégré à couple élevé avec EtherCAT & CAN BUS, adaptateur USB-CAN, résistance 120Ω
Actionneur servo MyActuator RMD-X12-320, moteur intégré à couple élevé avec EtherCAT & CAN BUS, adaptateur USB-CAN, résistance 120Ω
MyActuator
Impossible de charger la disponibilité du service de retrait
Vue d'ensemble
Le MyActuator RMD-X12-320 est un actionneur servo haute performance conçu pour les robots industriels, les robots collaboratifs et les systèmes d'automatisation de haute précision. Il intègre un moteur à couple élevé, un réducteur planétaire et une électronique de commande avancée dans un format compact, permettant un contrôle de mouvement fluide et une communication EtherCAT ou CAN BUS fiable.
Avec son design optimisé et ses nombreuses options d'interface, le RMD-X12-320 offre une efficacité exceptionnelle, un contrôle précis et une flexibilité pour des applications robotiques exigeantes.
Caractéristiques clés
-
Design intégré : Moteur, driver et réducteur intégrés dans un seul module compact.
-
Sortie de couple élevée : Idéal pour les articulations robotiques lourdes et les systèmes d'automatisation.
-
Protocoles de communication multiples : Prend en charge à la fois EtherCAT et CAN BUS.
-
Retour d'information précis : Encodeurs haute résolution pour un mouvement et un positionnement fluides.
-
câblage plug-and-play : Câbles clairement étiquetés et adaptateurs inclus pour une configuration rapide.
-
Large compatibilité : Convient aux robots industriels, robots collaboratifs, AGV et bras d'automatisation.
Description de l'interface
| Port | Définition | Description |
|---|---|---|
| 1. EtherCAT_OUT | Sortie EtherCAT | Sortie de communication vers d'autres modules. |
| 2. EtherCAT_IN | Entrée EtherCAT | Entrée de communication du contrôleur maître. |
| 3. VCC | Alimentation positive | Entrée DC positive principale. |
| 4. CAN_L | Bus CAN bas | Signal bas CAN pour la communication CAN. |
| 5. CAN_H | Bus CAN haut | Signal haut CAN pour la communication CAN. |
| 6. GND | Terre | Terminal d'alimentation négatif. |
| 7. T- / 8. T+ | Lignes de retour | Retour d'état du module à la station maître. |
| 9. R- / 10. R+ | Lignes de commande | Signaux de contrôle envoyés de la station maître à l'actionneur. |
Accessoires inclus
| Étiquette | Article | Description |
|---|---|---|
| A | Alimentation + Câble CAN BUS ×2 | Comprend un connecteur d'alimentation XT90 avec des fils blanc (CAN_L), jaune (CAN_H), rouge (VCC) et noir (GND). |
| B | Résistance terminale 120Ω ×1 | Pour la terminaison du CAN BUS. |
| C | Câble de communication EtherCAT ×2 | Connecteurs SH1.0mm à 4 broches pour la transmission et la réception du signal EtherCAT. |
| D | Module de communication CAN BUS ×1 | Adaptateur USB vers CAN pour diagnostics et intégration. Comprend une terminaison de 120Ω commutable. |
Informations sur l'emballage
-
Dimensions de la boîte : 280 mm (Longueur) × 230 mm (Largeur) × 130 mm (Hauteur)
-
Contenu :
-
X12-320 Servo Actionneur ×1
-
Alimentation + Câble de communication CAN BUS ×2
-
Résistance terminale 120Ω ×1
-
Câble de communication EtherCAT ×2
-
Module de communication CAN BUS ×1 (adaptateur USB-CAN)
-
Applications
-
Robots industriels et robots collaboratifs
-
AGV (Véhicules Autonomes Guidés) et AMR (Robots Mobiles Autonomes)
-
Bras robotiques pour l'automatisation et l'assemblage de précision
Plateformes de recherche et développement nécessitant un contrôle de mouvement fiable
Détails
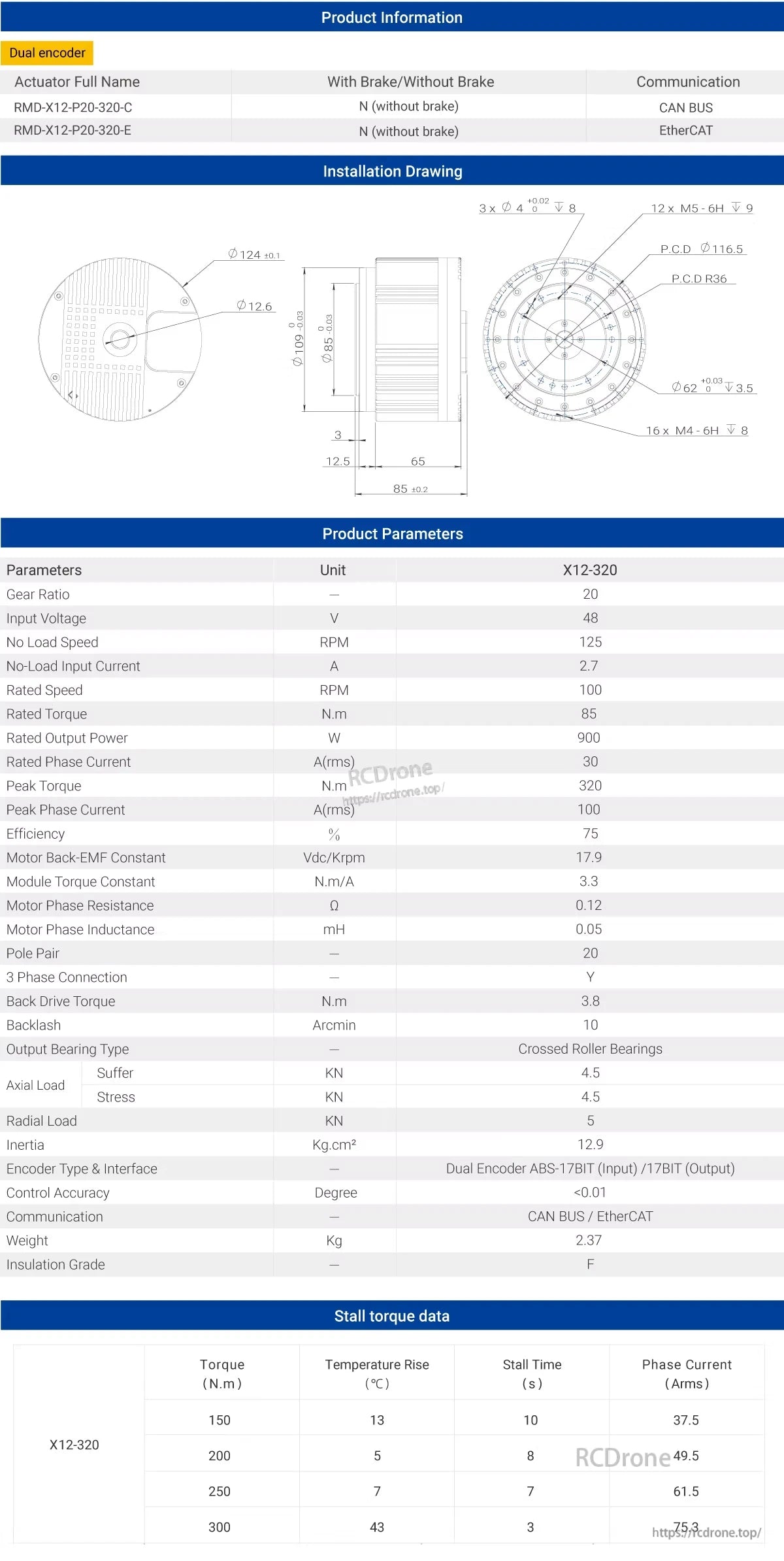
MonActionneur Actionneur servo RMD-X12-P20-320, double encodeur, rapport de réduction 20, entrée 48V, puissance 900W, couple nominal 85Nm, communication CAN BUS/EtherCAT, 2.37kg de poids, roulements à rouleaux croisés, inertie de 12,9kg.cm².

L'interface servo X12-320 prend en charge EtherCAT, le bus CAN et les connexions d'alimentation. Dimensions de l'emballage : 280×230×130mm. Comprend l'alimentation, les câbles, les résistances et un adaptateur USB-CAN gratuit.

Les accessoires X12-320 comprennent l'alimentation, les câbles CAN BUS, EtherCAT et les détails du module. Les fils, connecteurs et bornes codés par couleur garantissent une installation correcte. Un adaptateur USB-CAN gratuit est inclus par commande.

Servo RMD X12 320 : réponse de 100μs, double encodeur, EtherCAT/CAN, couple de 320N.m, Ø124mm×85mm, pour la robotique et l'automatisation.

RMD-X12-P20-320-C moteur servo : entrée 48V, rapport de réduction 20:1, puissance de crête de 900W, double encodeurs 17 bits, CAN BUS/EtherCAT, 2,37kg, avec dimensions détaillées.

Moteur servo X12-320L avec alimentation, câbles CAN BUS, EtherCAT et résistance de terminaison de 1200.

Affichage de l'emballage du servo MYACTUATOR, incluant les câbles CAN BUS et la résistance de 120Ω.
Related Collections




