






Actionneur planétaire MyActuator RMD-X4-10 10N·m, double encodeur, EtherCAT+CAN, entraînement d’articulation robotique
Actionneur planétaire MyActuator RMD-X4-10 10N·m, double encodeur, EtherCAT+CAN, entraînement d’articulation robotique
MyActuator
Impossible de charger la disponibilité du service de retrait
Aperçu
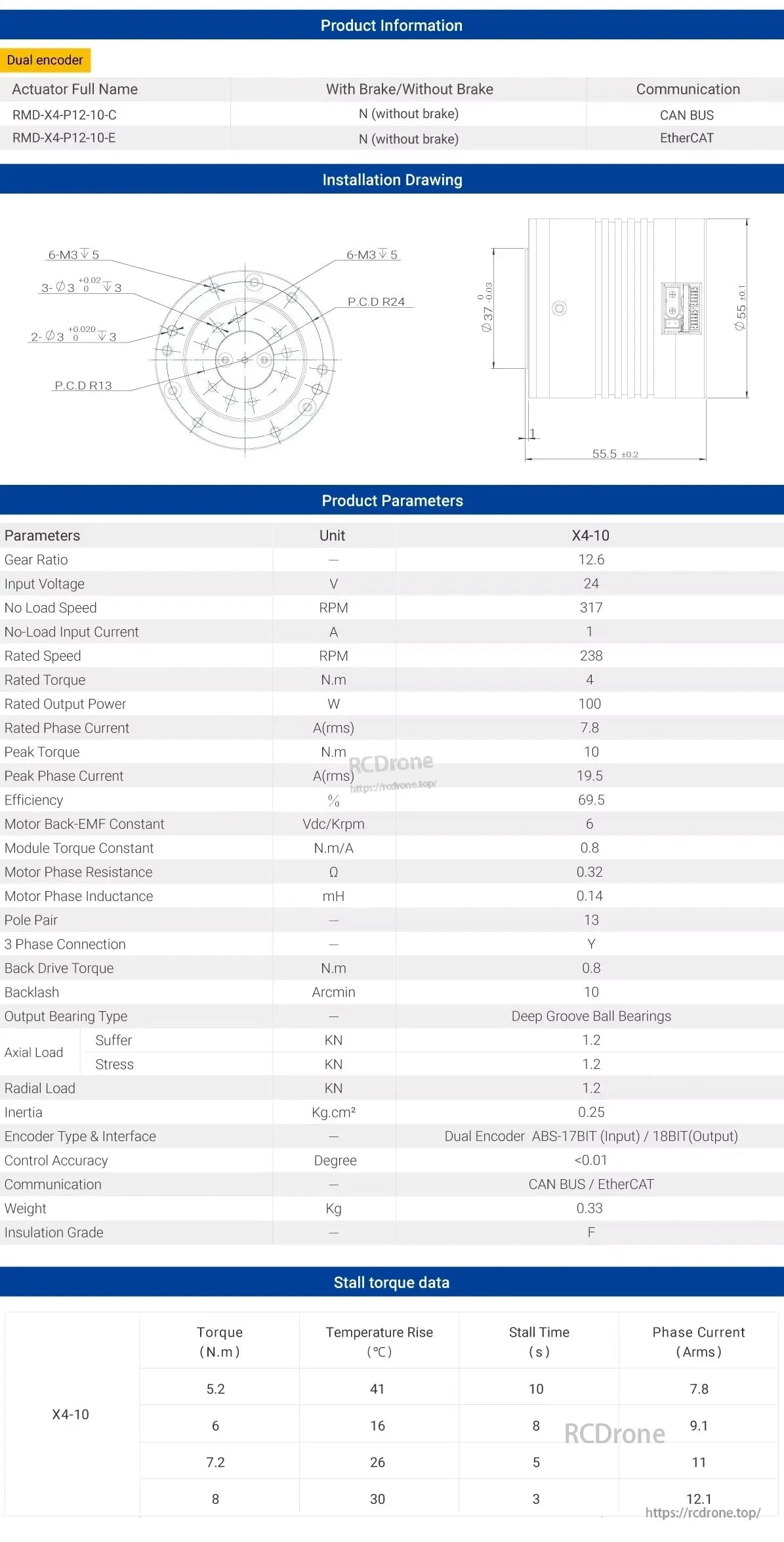
Le MyActuator RMD-X4-10 actionneur planétaire est un module de joint à moteur CC haute performance conçu pour des applications robotiques avancées. Avec un rapport de réduction planétaire de 12,6:1, un couple de pointe de 10N·m, et une puissance de sortie nominale de 100W, il intègre un système d'encodeur double (entrée 17 bits / sortie 18 bits) qui offre un contrôle de précision de 0,01°. Sa grande structure creuse permet l'intégration de plusieurs capteurs, créant un hub central pour le contrôle de la posture complète dans les robots humanoïdes. Avec une communication à double protocole EtherCAT et CAN, l'actionneur atteint une réponse ultra-rapide de 250μs, ce qui le rend idéal pour des scénarios à haute dynamique et haute fiabilité tels que les robots humanoïdes, les entraînements de jambes bioniques et l'automatisation industrielle.
Caractéristiques clés
-
Encodeur double haute précision : entrée 17 bits / sortie 18 bits avec 0.01° précision
-
Couple de pointe 10N·m avec un rapport de réduction planétaire de 12.6:1
-
Roulement à rouleaux croisés: Capacité exceptionnelle de moment anti-flexion pour des articulations robotiques stables
-
Communication double EtherCAT + CAN Bus: Prend en charge le couplage multi-machines, réponse ultra-rapide de 250μs
-
Grande structure creuse: Permet l'intégration de capteurs, câbles et anneaux de glissement pour des systèmes robotiques complexes
-
Haute fiabilité: Conçu pour le contrôle de la démarche humanoïde, transitions fluides pour la course, le saut et les mouvements complexes
-
Compact et léger: Φ55mm × 55.5mm, poids 0.33kg
Spécifications
| Paramètre | Valeur |
|---|---|
| Modèle | RMD-X4-10 |
| Rapport de transmission | 12.6:1 |
| Tension d'entrée | 24V DC |
| Vitesse nominale | 238 RPM |
| Vitesse à vide | 317 RPM |
| Puissance de sortie nominale | 100W |
| Couple nominal | 4N·m |
| Couple de pointe | 10N·m |
| Courant nominal | 7.84A |
| Courant à vide | 1A |
| Type d'encodeur | Encodeur double (ABS-17 bits / 18 bits) |
| Communication | EtherCAT + Bus CAN |
| Poids | 0,33 kg |
| Taille | Ø55mm × 55.5mm |
Applications
-
Robots humanoïdes – Entraînements articulaires pour bras, jambes et torse
-
Entraînements de jambes bioniques – Couple élevé avec conception anti-flexion pour la course et les sauts
-
Robots collaboratifs – Contrôle de mouvement fluide pour l'automatisation industrielle
-
Exosquelettes – Actionneurs légers et dynamiques pour dispositifs d'assistance humaine
-
Lignes de production flexibles – Synchronisation multi-axes via communication haute vitesse EtherCAT
Emballage & Accessoires
-
Alimentation + Câble de communication CAN Bus ×1
-
Résistance terminale 120Ω ×1
Câble de communication EtherCAT ×2
-
Module de communication CAN Bus ×1 (adaptateur USB-CAN inclus par commande)
Dimensions de l'emballage : 100mm × 100mm × 70mm
Détails

RMD-X4-PT2.5-10-C entraînement de joint robot à double encodeur avec entrée 24V, rapport de réduction 12.6, couple de 4N·m et sortie de 100W. Comprend une interface CAN BUS/EtherCAT, une vitesse à vide de 317RPM et un poids de 0.28kg. Inclut les dimensions d'installation et les spécifications techniques.

Actionneur planétaire avec couple de pointe de 10N.m, rapport de réduction 12.6:1, poids de 0.33kg. Taille : Ø55mm×55.5mm. Comprend une communication EtherCAT/CANBUS, un double encodeur, un MCU haute vitesse, des puces CAN et des roulements à billes à gorge profonde.

Entrée ABS-17BIT à double encodeur / Sortie 18BIT, X4-10, SN:40225621, MYACTUATOR

L'actionneur planétaire RMD-X4-10 de MYACTUATOR offre une puissance de 100W, un couple de 46Nm, un double encodeur, une vitesse de 238rpm. Livré avec câble d'alimentation + câble CAN BUS, résistance de 120Ω, câble EtherCAT, module CAN BUS et adaptateur USB-CAN gratuit.
L'actionneur planétaire robotique RMD-X4-10 dispose d'un double encodeur, 12.6 rapport de réduction, entrée 24V, sortie 100W, et CAN BUS/EtherCAT. Il délivre un couple de 4N.m, une vitesse de 238 RPM, pèse 0,33 kg et utilise des roulements à billes à gorge profonde pour une efficacité élevée.

L'interface X4-10 comprend des ports d'alimentation, CAN et EtherCAT. L'emballage contient une alimentation, des câbles, des résistances et un module. Dimensions : 100x100x70mm. Comprend un adaptateur USB-CAN avec chaque commande.

Les accessoires X4-10 comprennent une alimentation, des câbles CAN BUS et EtherCAT, une résistance terminale et un module CAN BUS. Les détails couvrent les connecteurs, les fonctions des fils, les lignes de signal et les notes sur l'adaptateur USB-CAN.
Related Collections






