





MyActuator RMD-X4-36 34N·m Actionneur planétaire Moteur DC sans balais avec double encodeur, EtherCAT & CAN Bus, rapport de réduction 36:1
MyActuator RMD-X4-36 34N·m Actionneur planétaire Moteur DC sans balais avec double encodeur, EtherCAT & CAN Bus, rapport de réduction 36:1
MyActuator
Impossible de charger la disponibilité du service de retrait
Aperçu
Le MyActuator RMD-X4-36 Actionneur Planétaire Moteur DC Sans Balais est un actionneur de joint haute performance conçu pour les systèmes de robotique et d'automatisation nécessitant un contrôle de mouvement précis, un couple élevé et une intégration compacte. Avec un couple de pointe de 34N·m, un rapport de réduction de 36:1, et une structure à roulements croisés, il offre une excellente capacité anti-flexion et durabilité. Doté de protocoles de communication doubles EtherCAT + CAN et d'une réponse ultra-rapide de 250μs, cet actionneur est idéal pour les robots humanoïdes, les bras robotiques, les plateformes mobiles et d'autres applications robotiques avancées. Son design à double encodeur (entrée ABS 17 bits / sortie 18 bits) garantit une précision de positionnement ultra-élevée, tandis que sa taille compacte (55mm × 61mm, 0.36kg) permet une intégration légère et efficace.
Caractéristiques Clés
-
Encodeur Double Haute Précision: 17 bits (entrée) + 18 bits (sortie) pour une précision de 0,01°.
-
Protocoles EtherCAT + CAN Bus: Communication flexible avec une réponse ultra-rapide de 250μs.
-
Roulements à Rouleaux Croisés: Performance anti-flexion supérieure et longue durée de vie.
-
Densité de Puissance Élevée: Compact avec un diamètre de 55mm, une longueur de 61mm, et un poids de seulement 0,36kg.
-
Couple de Pointe 34N·m et Couple Nominal 11,5N·m garantissent une sortie de mouvement stable et puissante.
-
Haute Efficacité: Puissance nominale de 100W avec technologie FOC (Contrôle Orienté Champ) fluide.
-
Application Polyvalente: Conçu pour les robots humanoïdes, les exosquelettes, les manipulateurs et les systèmes d'automatisation.
Spécifications
| Paramètre | Valeur |
|---|---|
| Modèle | RMD-X4-P36-36-C |
| Tension d'entrée | 24V |
| Rapport de réduction | 36:1 |
| Vitesse à vide | 111 RPM |
| Courant à vide | 0.9 A |
| Vitesse nominale | 83 RPM |
| Couple nominal | 11.5 N·m |
| Puissance de sortie nominale | 100 W |
| Couple de pointe | 34 N·m |
| Courant de phase de pointe | 21.5 A (rms) |
| Paquets de pôles | 13 |
| Type d'encodeur | Encodeur double ABS 17 bits (Entrée) / 18 bits (Sortie) |
| Protocoles de communication | EtherCAT / CAN Bus |
| Taille | Ø55mm × 61mm |
| Poids | 0.36 kg |
Contenu du paquet
-
1 × Moteur d'actionneur planétaire RMD-X4-36
-
1 × Alimentation + Câble de communication CAN Bus
-
1 × Résistance terminale 120Ω
-
2 × Câbles de communication EtherCAT
-
1 × Module de communication CAN Bus (adaptateur USB-CAN)
Applications
-
Robots humanoïdes et bioniques
-
Bras robotiques collaboratifs
-
Exosquelettes et robots de réhabilitation
-
Robots de service et plateformes mobiles
-
Systèmes d'automatisation de précision nécessitant des actionneurs compacts à couple élevé
Détails

Actionneur planétaire avec 34N.m couple de pointe, rapport de réduction 36:1, 0.Poids de 36 kg, taille Ø55mm×61mm. Caractéristiques : communication EtherCAT/CANBUS, double encodeur, MCU haute vitesse, puces CAN et roulements à rouleaux croisés.

Moteur RMD-X4-P36-36 : 24V, couple de 10,5N.m, 83RPM, double encodeur, EtherCAT+CAN BUS, rapport de réduction 36, 0,36kg, encodeur ABS-17BIT/18BIT, dimensions détaillées incluses.

Moteur X4-36, 100W, 12N.m, double encodeur, entrée 17BIT, sortie 18BIT, 63rpm, rapport de réduction 1:36, interface CAN bus, indicateur LED.

Moteur MYACTUATOR X4-36, 100W, 12N.m, double encodeur, 83rpm, rapport 1:36. Comprend une alimentation, un câble CAN BUS, une résistance de 120Ω, des câbles EtherCAT et un module CAN BUS avec adaptateur USB-CAN gratuit.
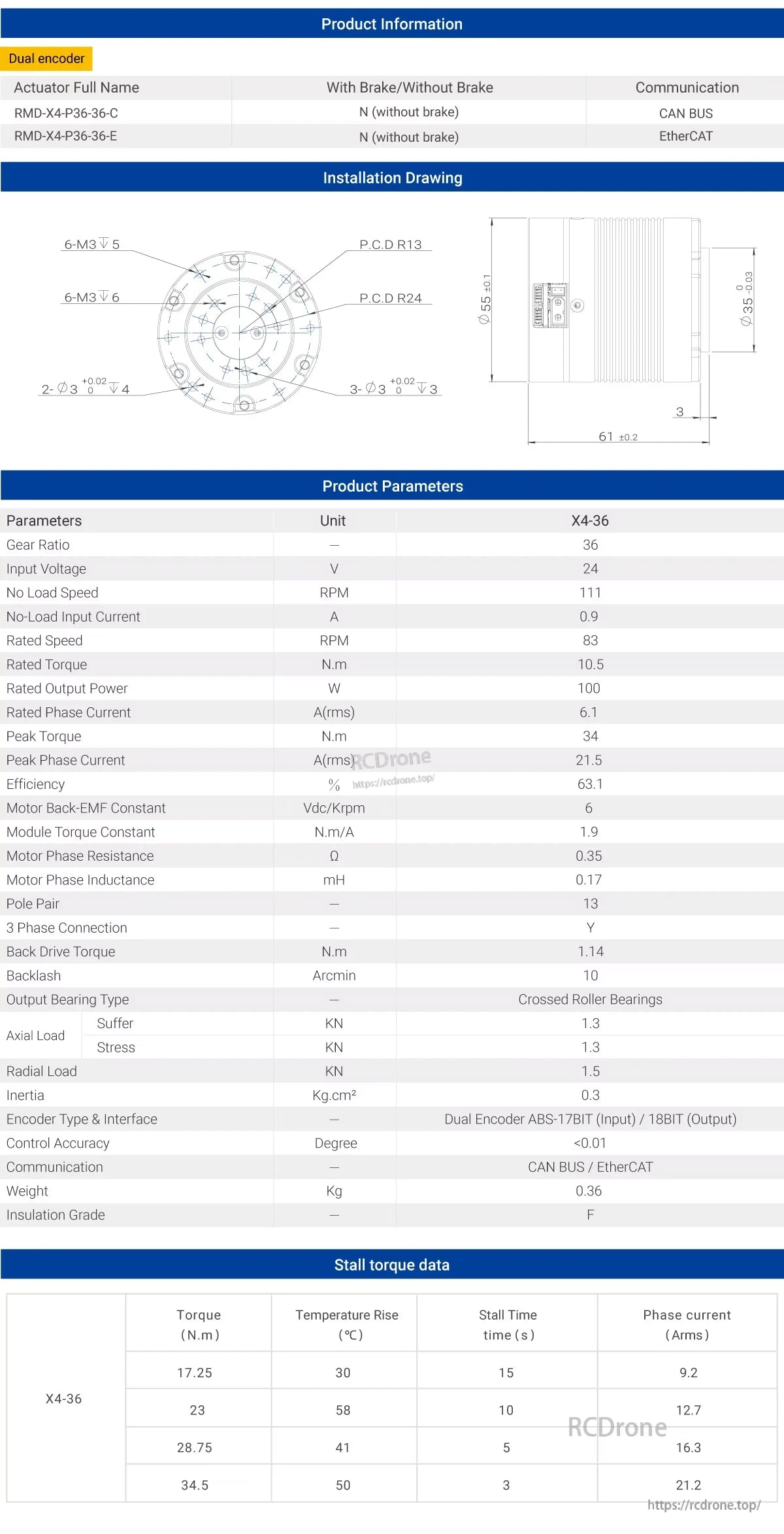
Le moteur RMD-X4-P36-36 dispose d'un double encodeur, d'un rapport de réduction de 36, d'une entrée de 24V, d'une sortie de 100W, CAN BUS/EtherCAT. Couple nominal : 10,5 N.m, vitesse : 83 RPM, poids : 0,36 kg. Les données de couple de blocage incluent le couple, l'augmentation de température, le temps et les valeurs de courant de phase.

Les détails de l'interface incluent des ports d'alimentation, CAN et EtherCAT. L'emballage comprend un moteur, des câbles, des résistances et des modules de communication. Dimensions : 100x100x70mm. Comprend un adaptateur USB-CAN.
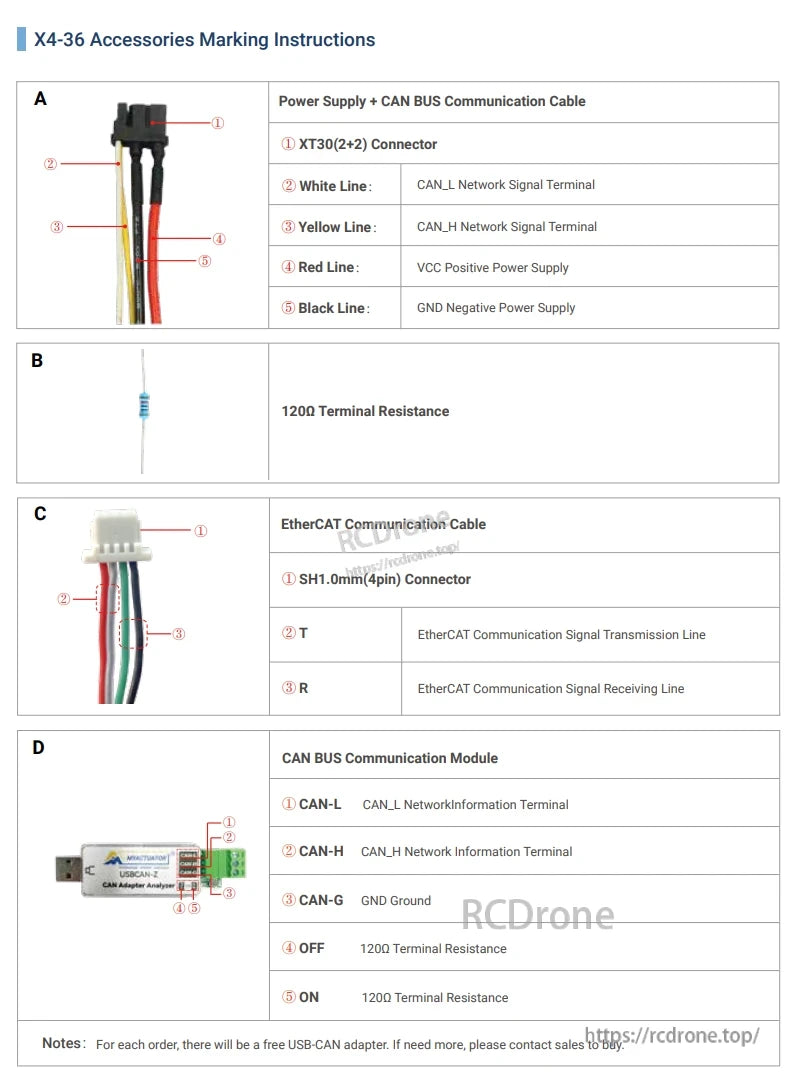
Les accessoires X4-36 incluent une alimentation, des câbles CAN BUS, EtherCAT, une résistance de 120Ω et un module CAN. Les détails couvrent les connecteurs, les couleurs des fils, les lignes de signal et les réglages des terminaux pour les connexions de communication et d'alimentation. Adaptateur USB-CAN inclus avec chaque commande.
Related Collections





