





Servomoteur à double encodeur MyActuator RMD-X6-60 320W 20N·m 60N·m crête 48V EtherCAT CAN BUS Moteur d’articulation robotique haute précision
Servomoteur à double encodeur MyActuator RMD-X6-60 320W 20N·m 60N·m crête 48V EtherCAT CAN BUS Moteur d’articulation robotique haute précision
MyActuator
Impossible de charger la disponibilité du service de retrait
Aperçu
Le MyActuator RMD-X6-60 actionneur servo intelligent est une unité d'entraînement intégrée compacte et haute performance, conçue pour la robotique, l'automatisation et les applications de contrôle de mouvement de précision. Équipé d'interfaces de communication EtherCAT et CAN BUS et d'un système d'encodeurs doubles, cet actionneur offre une densité de couple élevée, un contrôle précis et une gestion de mouvement multi-mode. Il est idéal pour les articulations de robots, les bras robotiques, les robots mobiles et les systèmes d'automatisation industrielle qui nécessitent une grande précision et fiabilité.
Paramètres clés :
-
Puissance nominale : 320W
-
Couple nominal : 20N·m
-
Couple de pointe : 60N·m
-
Vitesse nominale : 153RPM
-
Rapport de réduction : 19.612:1
-
Précision de l'encodeur double : 17 bits d'entrée / 17 bits de sortie
-
Protocoles de communication : CAN BUS, EtherCAT
-
Tension d'entrée : 48V
Caractéristiques clés
-
Conception d'encodeur double
Encodeurs d'entrée et de sortie intégrés de 17 bits fournissent un retour d'information précis pour un contrôle de mouvement et une surveillance de l'état précis. -
Support multi-protocoles
Interfaces EtherCAT et CAN BUS intégrées garantissent une large compatibilité avec différentes plateformes de contrôle robotique et d'automatisation. -
Densité de puissance et couple élevés
Capable de fournir 320W de puissance continue et 60N·m de couple maximal, répondant aux exigences des applications dynamiques et à charge lourde. -
Modes de Contrôle Hybrides
Prend en charge le contrôle hybride de position, de vitesse et de couple, permettant des systèmes de mouvement multi-axes avancés et coordonnés. -
Retour d'Information Haute Précision et Réponse Rapide
Un MCU haute vitesse intégré et des processeurs CAN offrent une réponse au niveau de la milliseconde pour un contrôle précis. -
Conception Compacte et Légère
Dimensions de 120mm × 120mm × 80mm et un poids de 0.82kg en font un choix idéal pour des applications robotiques légères où l'espace et le poids sont critiques.
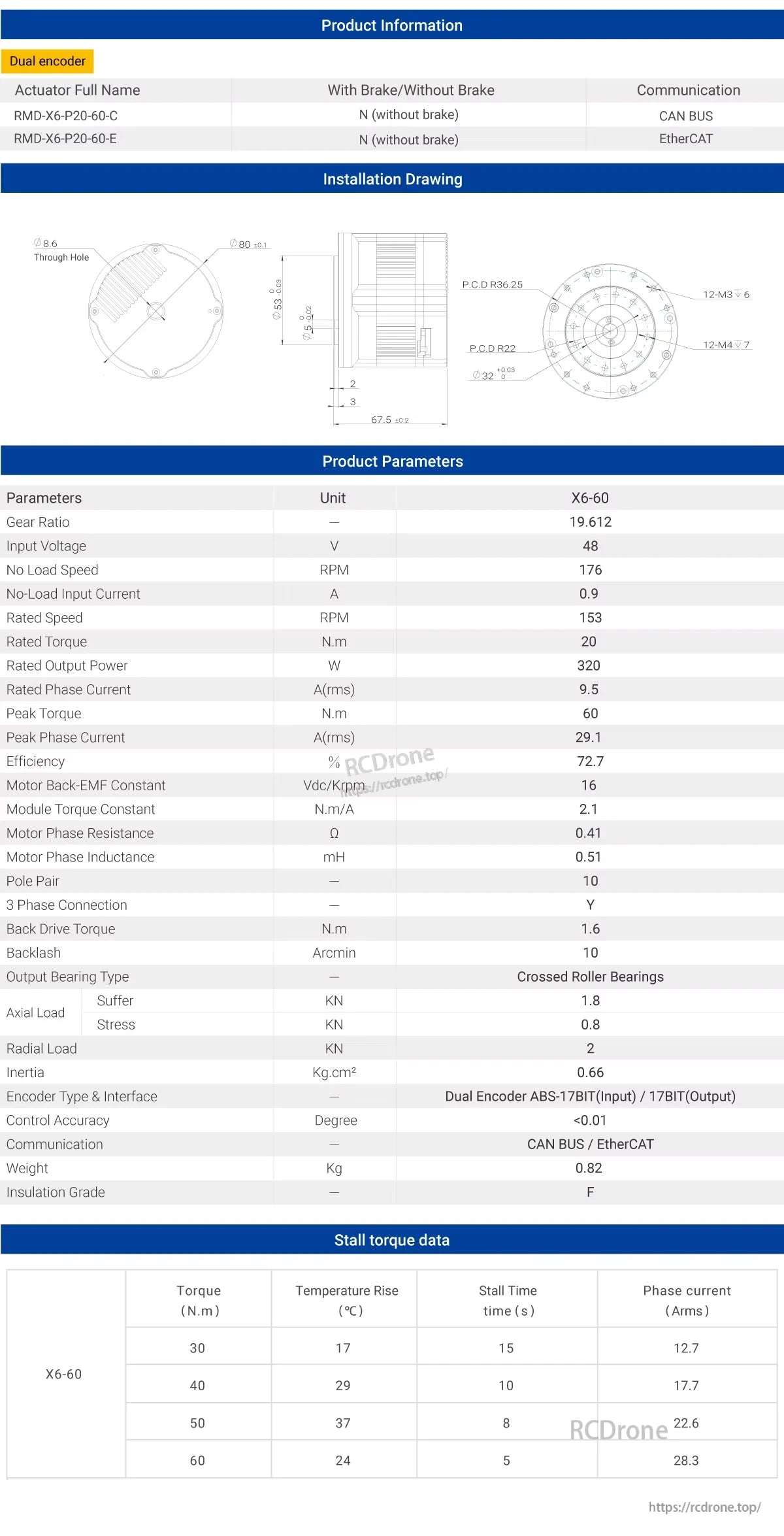
Spécifications techniques
| Paramètre | Valeur |
|---|---|
| Modèle | RMD-X6-P20-60-C |
| Tension d'entrée | 48V |
| Puissance nominale | 320W |
| Couple nominal | 20N·m |
| Couple de pointe | 60N·m |
| Vitesse nominale | 153RPM |
| Vitesse à vide | 176RPM |
| Courant nominal | 9.5A (RMS) |
| Courant à vide | 0.9A |
| Courant de pointe | 29.1A (RMS) |
| Rapport de transmission | 19.612:1 |
| Paires de pôles | 10 |
| Résolution de l'encodeur | Entrée : 17 bits / Sortie : 17 bits |
| Poids | 0.82kg |
Description de l'interface
Ports d'alimentation et de communication
| Port | Description |
|---|---|
| EtherCAT_OUT | Port de sortie EtherCAT |
| EtherCAT_IN | Port d'entrée EtherCAT |
| CAN_L | Terminal de signal CAN bas |
| CAN_H | Terminal de signal CAN haut |
| GND | Alimentation négative |
| VCC | Alimentation positive |
Terminaux de signal
R+/R-: Données de retour du module à la station maître
-
T+/T-: Signaux de commande de contrôle de la station maître au module
Dimensions et Structure
-
Diamètre: 120mm
-
Hauteur: 80mm
-
Orifices de montage: P.C.D R26.25 et R22 avec 12 × trous filetés M4
-
Arbre de sortie : Interface de flasque standard pour accouplement flexible avec des composants externes
Informations sur l'emballage
| Articles inclus | Quantité |
|---|---|
| Alimentation + Câble de communication CAN BUS | 2 pcs |
| Câble de communication EtherCAT | 2 pcs |
| Résistance terminale de 120Ω | 1 pc |
| Module de communication CAN BUS (Adaptateur USB-CAN) | 1 pc |
Dimensions de l'emballage :
-
Longueur × Largeur × Hauteur : 120mm × 120mm × 80mm
Accessoires et connexions
Alimentation + Câble CAN BUS
-
Connecteur : XT30 (2+2)
-
Ligne blanche : signal CAN_L
-
Ligne jaune : signal CAN_H
-
Ligne rouge : alimentation positive VCC
-
Ligne noire : alimentation négative GND
Câble de communication EtherCAT
-
Connecteur : SH1.0mm (4-pin)
-
Ligne T : Transmission du signal de communication EtherCAT
-
Ligne R : Réception du signal de communication EtherCAT
Module CAN BUS
-
Terminaux : CAN_L, CAN_H, CAN_G, et terminaison commutable 120Ω (ON/OFF)
-
Adaptateur USB-CAN fourni gratuitement avec chaque commande
Applications
-
Articulations de Robot Collaboratif
-
Robots de Service et Humanoïdes
-
Systèmes de Direction ou de Propulsion de Robot Mobile
-
Bras Robotiques Industriels
-
Systèmes de Contrôle de Mouvement de Haute Précision
Plateformes de recherche et d'éducation
Résumé
L'Actionneur MyActuator RMD-X6-60 intègre des encodeurs doubles de haute précision, des protocoles de communication EtherCAT et CAN BUS, une densité de couple élevée et un format compact, ce qui en fait une solution polyvalente et fiable pour la robotique et l'automatisation industrielle. Avec sa puissance de 320W, un couple maximal de 60N·m et un retour d'information haute résolution de 17 bits, cet actionneur servo offre des performances exceptionnelles et une précision de contrôle pour des projets de robotique avancée.
Détails
L'actionneur servo RMD-X6-60 dispose d'un double encodeur, d'un rapport de réduction de 19,612, d'une entrée de 48V, d'une puissance de 320W, d'une communication CAN BUS/EtherCAT, d'un couple nominal de 20 N.m, d'un couple maximal de 60 N.m et pèse 0,82 kg.
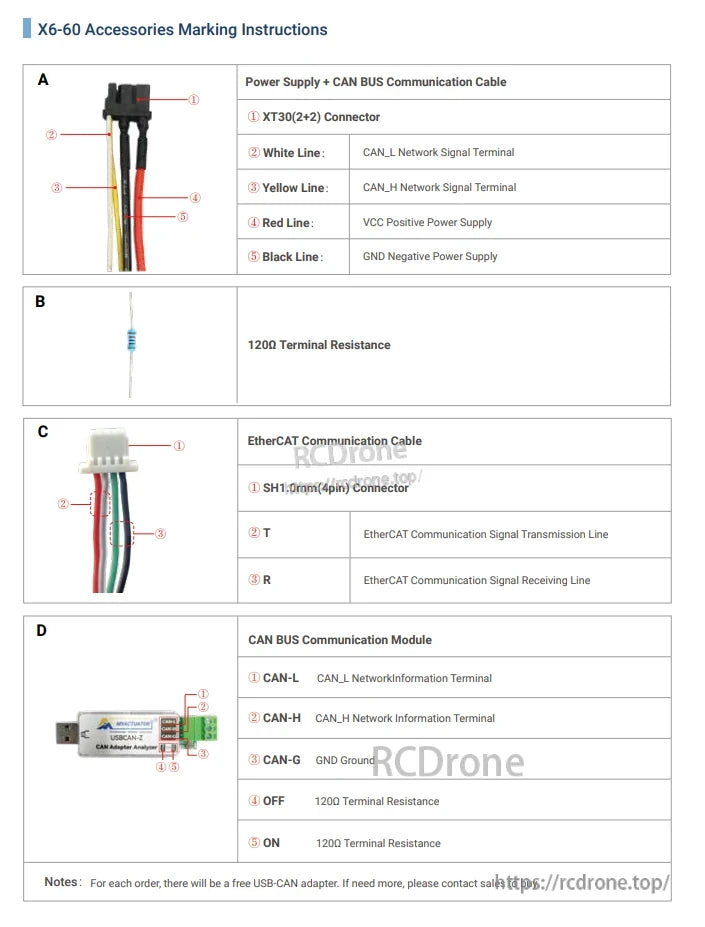
Les accessoires X6-60 incluent un câble d'alimentation et un câble CAN BUS avec des fils codés par couleur, une résistance terminale de 120Ω, un câble EtherCAT avec des lignes T/R, et un module CAN BUS avec des bornes pour CAN-L, CAN-H, GND, et des réglages de résistance terminale. Un adaptateur USB-CAN gratuit est inclus par commande.

Actionneur servo RMD-X6-P20-60-C avec EtherCAT+CAN BUS, 19.612 ratio, 48V entrée, 153RPM vitesse nominale, 20Nm couple, 320W sortie, double encodeur, MCU haute vitesse et puce CAN, roulement à rouleaux croisés.
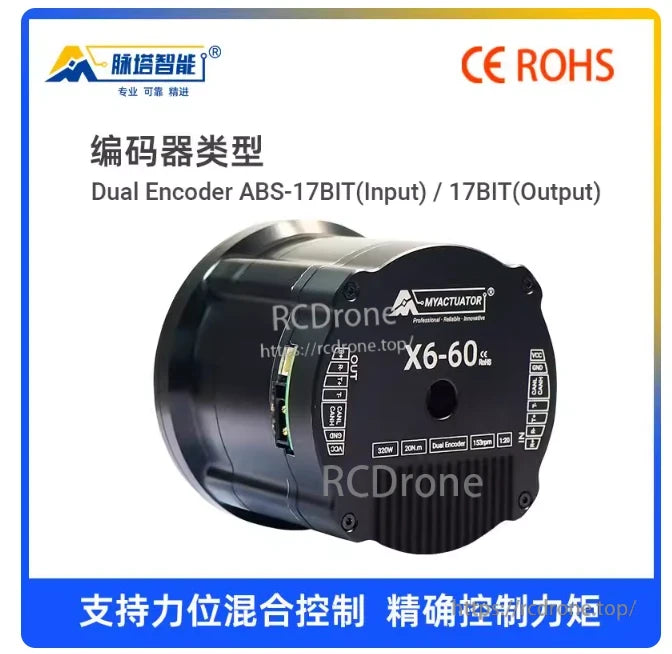
Encodeur double ABS-17BIT Entrée/Sortie, Actionneur Servo X6-60, 300W, 20N.m, 128rpm, prend en charge le contrôle hybride force-position, contrôle de couple précis.
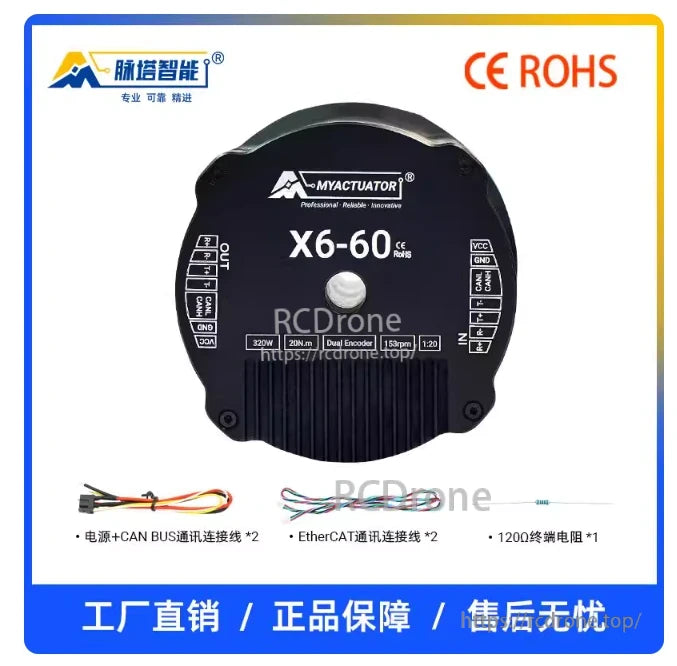
Actionneur servo X6-60, 320W, 20N.m, double encodeur, 158rpm, rapport 1:20, avec câbles CAN BUS et EtherCAT, terminaison 120Ω, certifié CE ROHS.

Emballage de l'actionneur servo RMD-X6-60 avec câblage CAN BUS, câble d'alimentation et résistance de terminaison 1200.
Related Collections





