




Actionneur de servomoteur MyActuator RMD-X8-120 48V 574W 110N·m Couple Crête Double Encodeur EtherCAT CAN BUS pour robots et bras robotiques
Actionneur de servomoteur MyActuator RMD-X8-120 48V 574W 110N·m Couple Crête Double Encodeur EtherCAT CAN BUS pour robots et bras robotiques
MyActuator
Impossible de charger la disponibilité du service de retrait
Présentation
Le servo moteur MyActuator RMD-X8-120 intègre un réducteur planétaire, des encodeurs doubles de 17 bits, et un contrôleur de moteur haute performance, offrant un couple puissant et un contrôle de mouvement précis. Avec une puissance nominale de 574W, un couple nominal de 43N·m, et jusqu'à 110N·m de couple de pointe, il est idéal pour les robots humanoïdes, les bras robotiques, les robots quadrupèdes et d'autres systèmes d'automatisation intelligente. Supportant les protocoles CAN BUS et EtherCAT, il garantit une intégration transparente avec les plateformes robotiques modernes.
Spécifications clés
| Paramètre | Valeur |
|---|---|
| Modèle | RMD-X8-P20-120-C |
| Rapport de réduction | 19.612:1 |
| Tension | 48V |
| Vitesse à vide | 158 RPM |
| Vitesse nominale | 127 RPM |
| Courant à vide | 1.6 A |
| Couple nominal | 43 N·m |
| Couple de pointe | 110 N·m |
| Courant de phase de pointe | 43.8 A (rms) |
| Puissance nominale | 574 W |
| Poids | 1.4 kg |
| Dimensions | Φ96 mm × 76 mm de hauteur |
| Type d'encodeur | Encodeur double ABS-17BIT (Entrée) / 17BIT (Sortie) |
| Communication | CAN BUS / EtherCAT |
Interface & Connectivité
-
EtherCAT IN/OUT pour une communication en temps réel à haute vitesse
-
CAN_H & CAN_L bornes pour le réseau CAN BUS
-
VCC/GND pour l'alimentation (48V)
-
Canaux de signal (T-/T+/R-/R+) pour retour d'état et de commande
Accessoires inclus
-
2× Alimentation + câbles de communication CAN BUS
2× Câbles de communication EtherCAT
-
1× Résistance terminale de 120Ω
-
1× Module de communication CAN BUS avec adaptateur USB-CAN
Caractéristiques clés
-
Contrôle de haute précision – Les encodeurs absolus à 17 bits permettent un contrôle précis de la position, de la vitesse et du couple.
-
Sortie de couple élevée – Couple nominal 43N·m, pic 110N·m pour des charges exigeantes.
-
Conception intégrée – Structure compacte avec réducteur planétaire et module d'entraînement pour une installation facile.
-
Support de protocole double – Compatible avec CAN BUS et EtherCAT pour une intégration flexible.
-
Construction robuste – Roulements à rouleaux croisés de haute résistance garantissent la durabilité sous des charges lourdes.
Applications
-
Articulations de robot humanoïde
-
Bras robotiques collaboratifs
-
Robots quadrupèdes et bipèdes
-
Systèmes d'exosquelettes
-
Plateformes mobiles autonomes
-
Automatisation industrielle de haute précision
Détails

L'actionneur servo M-RMD X8-120 offre un double encodeur, une entrée de 48V, un couple de 43 N.m, une puissance de 574W, CAN BUS/EtherCAT, un rapport de réduction de 19.612, 10 paires de pôles, un poids de 1.40 kg, et des détails sur le couple de blocage.
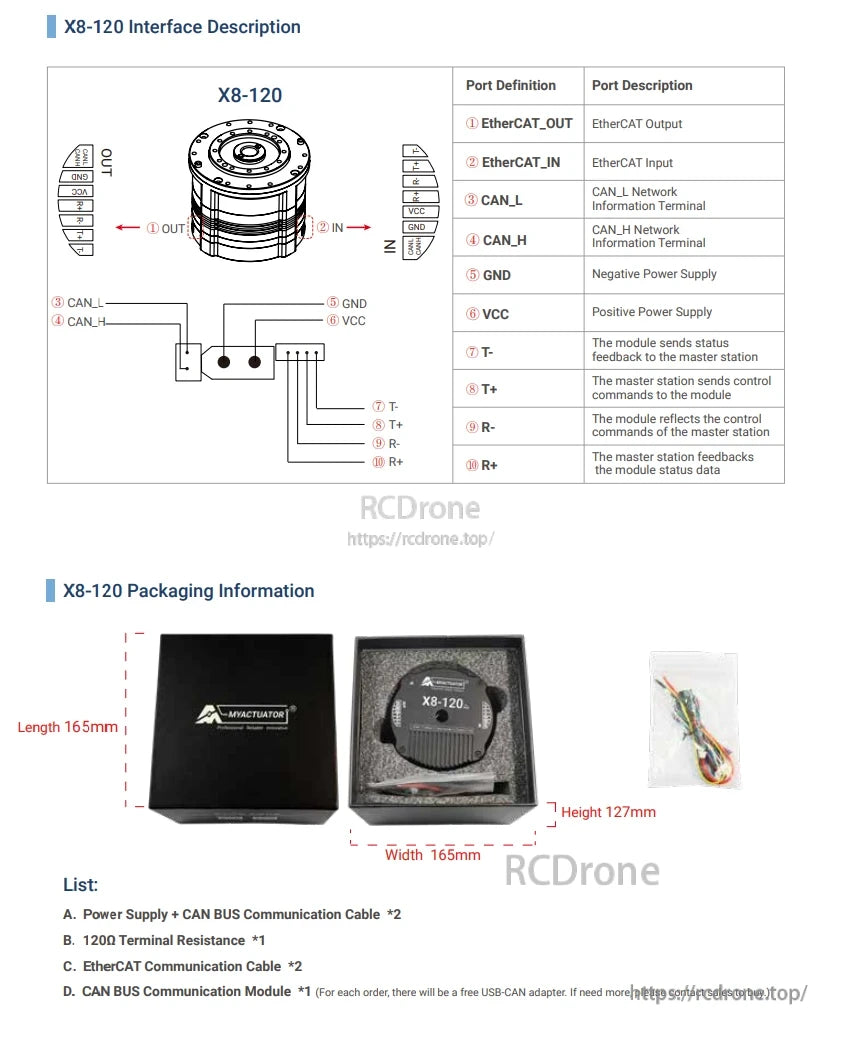
L'interface servo X8-120 prend en charge EtherCAT et le bus CAN, comprend des connexions d'alimentation, de signal, et un adaptateur USB-CAN. Emballage : 165x165x127mm. Contient une alimentation, des câbles, une résistance terminale, et un module de communication.

Les accessoires du MyActuator X8-120 incluent une alimentation avec câble CAN BUS, une résistance terminale de 120Ω, un câble EtherCAT et un module CAN BUS. Les détails couvrent les connecteurs, les fonctions des fils et les terminaux pour la communication et l'alimentation. Un adaptateur USB-CAN gratuit est inclus par commande.

MyActuator moteur servo X8-120, 574W, 45N.m, double encodeur, 127rpm, rapport 1:20. Comprend des câbles d'alimentation + CAN BUS, des câbles EtherCAT et un terminateur de 120Ω. Certifié CE ROHS.

Servo à double encodeur EtherCAT + CAN BUS, modèle RMD-X8-P20-120-C, 48V, rapport de réduction 19.612, 127RPM, couple de 43N.m, sortie de 574W, poids de 1.4kg, avec MCU haute vitesse, puce CAN et roulements à rouleaux croisés.

Entrée/Sortie à double encodeur ABS-17BIT, X8-120CL, prend en charge le contrôle hybride force-position, contrôle de couple précis.

Servomoteur MYACTUATOR X8-120 avec câbles d'alimentation, CAN BUS, EtherCAT et terminator 120Ω. L'emballage comprend deux câbles pour l'alimentation et la communication.

Module d'engrenage planétaire intégré, double encodeur, communication EtherCAT/CAN, couple maximal de 120N.m, dimensions 96mm×76mm, pour articulations robotiques.
Related Collections




