





Main de robot OYMotion ROH-AP001, 6 DOF, 11 articulations, capteurs de force, UART/RS485/CAN, contrôle PID, 0,7 s
Main de robot OYMotion ROH-AP001, 6 DOF, 11 articulations, capteurs de force, UART/RS485/CAN, contrôle PID, 0,7 s
OYMotion
Impossible de charger la disponibilité du service de retrait
Vue d'ensemble
La main robotique OYMotion ROH-AP001 est une main robotisée avec 11 articulations mobiles et 6 moteurs intégrés fournissant 6 degrés de liberté actifs. Un algorithme de contrôle de moteur PID intégré permet une saisie et une manipulation précises et répétables des objets. Chaque doigt intègre un capteur de force pour le suivi en temps réel et le contrôle en boucle fermée de la force de préhension. Les interfaces physiques incluent UART, RS485 ou CAN FD, avec prise en charge du protocole série SerialCtrl, ModBus-RTU et du protocole CAN. Les plateformes ROS/ROS2 sont prises en charge pour le développement secondaire via SDK (accord de licence requis).
Caractéristiques clés
- 6 DOF actifs et 11 articulations ; doigts motorisés indépendamment pour une prise naturelle.
- Drivers de moteur intégrés et contrôle PID ; toute l'actionnement intégré dans la main.
- Capteurs de force sur chaque doigt avec retour tactile et contrôle de force en temps réel.
- Rotation du pouce motorisée plus design de doigt pliable.
- Opération à écran tactile prise en charge au bout des doigts.
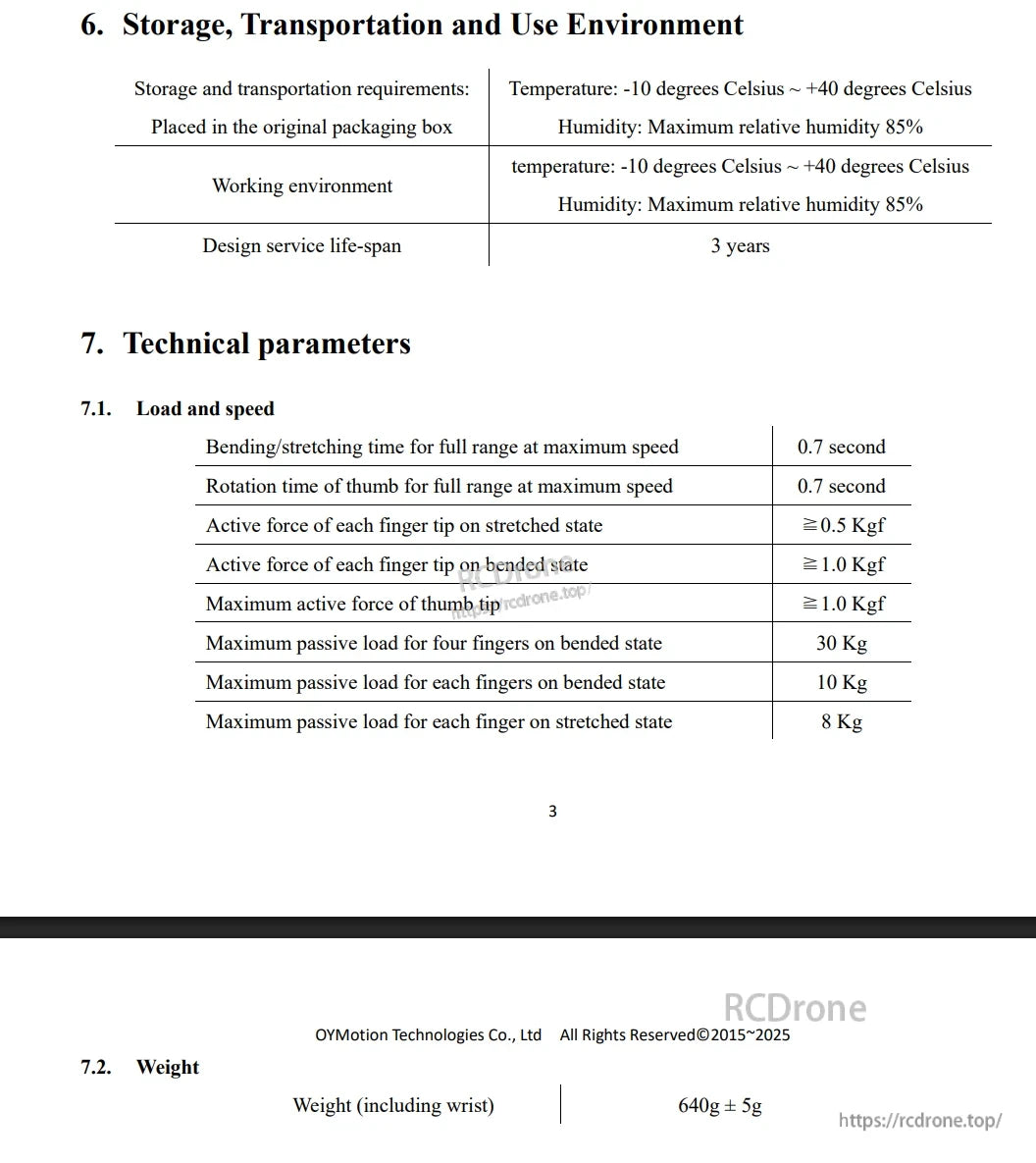
- Mouvement rapide : 0,7 s pour une flexion/étirement complet et 0,7 s pour une rotation complète du pouce.
- Capacité de charge : jusqu'à 30 Kg de charge passive pour quatre doigts (pliés), 10 Kg par doigt (plié), 8 Kg par doigt (étiré).
- Taille et proportions semblables à celles d'un humain ; coussinets de doigts doux et gants en silicone ; design de poignet personnalisé ; bip de message.
- Interfaces et protocoles : UART/RS485/CAN avec SerialCtrl et ModBus-RTU ; CAN à 1M bauds.
- Matériaux utilisés : alliage d'aluminium, alliage de zinc, acier inoxydable, silicone, plastique.
Spécifications
| DOF actif | 6 |
| Articulations mobiles | 11 |
| Distance verticale du bout du majeur au poignet | 183 mm |
| Distance verticale du bout du pouce au poignet | 95 mm |
| Longueur du pouce | 111 mm |
| Largeur maximale de la paume | 82 mm |
| Diamètre du poignet | 49 mm |
| Angle d'ouverture et de fermeture maximal du côté du pouce | 0~31 ° |
| Angle d'ouverture et de fermeture maximal du pouce à la paume | 0~50 ° |
| Angle de rotation latérale du pouce | 0~90 ° |
| Temps de flexion/étirement pour toute la plage à la vitesse maximale | 0.7 secondes |
| Temps de rotation du pouce pour une plage complète à la vitesse maximale | 0,7 seconde |
| Force active de chaque extrémité de doigt en état étiré | ≥0,5 Kgf |
| Force active de chaque extrémité de doigt en état plié | ≥1,0 Kgf |
| Force active maximale de l'extrémité du pouce | ≥1.0 Kgf |
| Charge passive maximale pour quatre doigts en état plié | 30 Kg |
| Charge passive maximale pour chaque doigt en état plié | 10 Kg |
| Charge passive maximale pour chaque doigt en état étendu | 8 Kg |
| Fonction tactile du doigt | Pris en charge |
| Retour de force du doigt | Pris en charge |
| Température de l'environnement de travail | -10 °C ~ +40 °C |
| Humidité de l'environnement de travail | Humidité relative maximale 85% |
| Durée de vie de conception | 3 ans |
| Poids (y compris le poignet) | 640 g ± 5 g |
| Interface de communication | UART/RS485/CAN |
| Débit en bauds | UART : 9600/19200/38400/57600/115200/230400/460800/921600 ; RS485 : 9600/19200/38400/57600/115200/230400/460800 ; CAN : 1M |
| Protocoles pris en charge | UART : SerialCtrl, ModBus-RTU ; RS485 : SerialCtrl, ModBus-RTU ; CAN : SerialCtrl |
| Matériaux | Alliage d'aluminium ; alliage de zinc ; acier inoxydable ; silicone ; plastique |
Applications
- Effecteurs terminaux robotiques et robots humanoïdes.
- Équipement éducatif et de recherche.
- Prothèses bioniques.
- Automatisation industrielle et systèmes AGV.
Pour toute assistance à la commande, conseils d'intégration ou support technique, veuillez contacter [email protected] or visiter https://rcdrone.top/.
Manuels
Détails

Le ROHand offre une précision de positionnement de ±1 mm grâce à un contrôle moteur PID intégré et propose six degrés de liberté actifs pour simuler les mouvements de la main humaine tels que pincer et saisir. Idéal pour les robots humanoïdes, les effecteurs terminaux robotiques, les systèmes d'inspection, les prothèses bioniques intelligentes et les applications éducatives ou de recherche, sa conception permet une manipulation précise et polyvalente dans des tâches complexes.
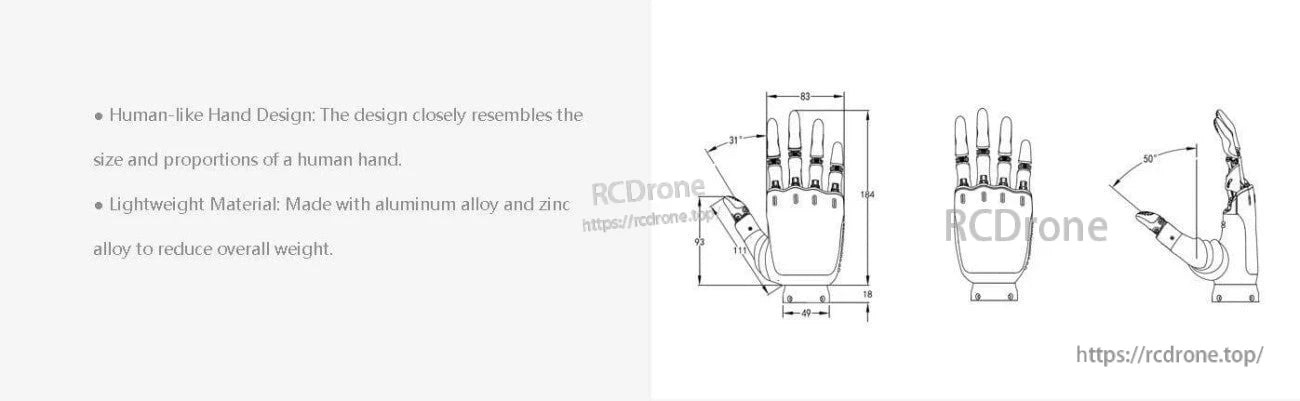
Main robotique habile semblable à celle d'un humain, construite en alliage d'aluminium et de zinc léger avec des dimensions précises.

La main robotique habile OYMotion ROH-AP001 imite les proportions humaines, avec des doigts articulés et des capteurs pour une manipulation robotique précise et à taille réelle.
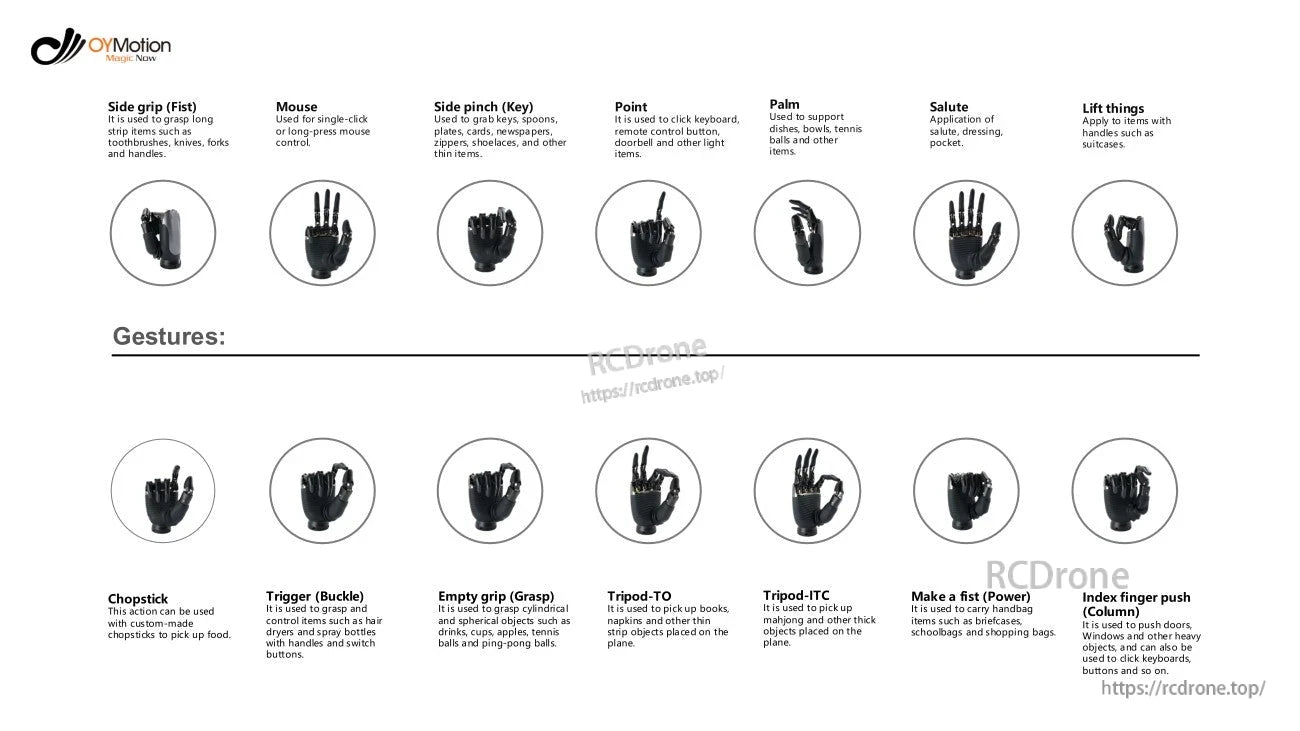
La main robotique OYMotion exécute 14 gestes précis—comme saisir, pointer et soulever—pour gérer des tâches quotidiennes telles que l'utilisation de baguettes, le transport de sacs ou le clic sur des claviers, démontrant une dextérité avancée et une utilité pratique.

La main robotique OYMotion offre des doigts motorisés, un design pliable, des coussinets doux, un pouce motorisé, un gant en silicone, une activation intégrée, un bip, un poignet personnalisé et un connecteur RS485 pour une prise naturelle habile.
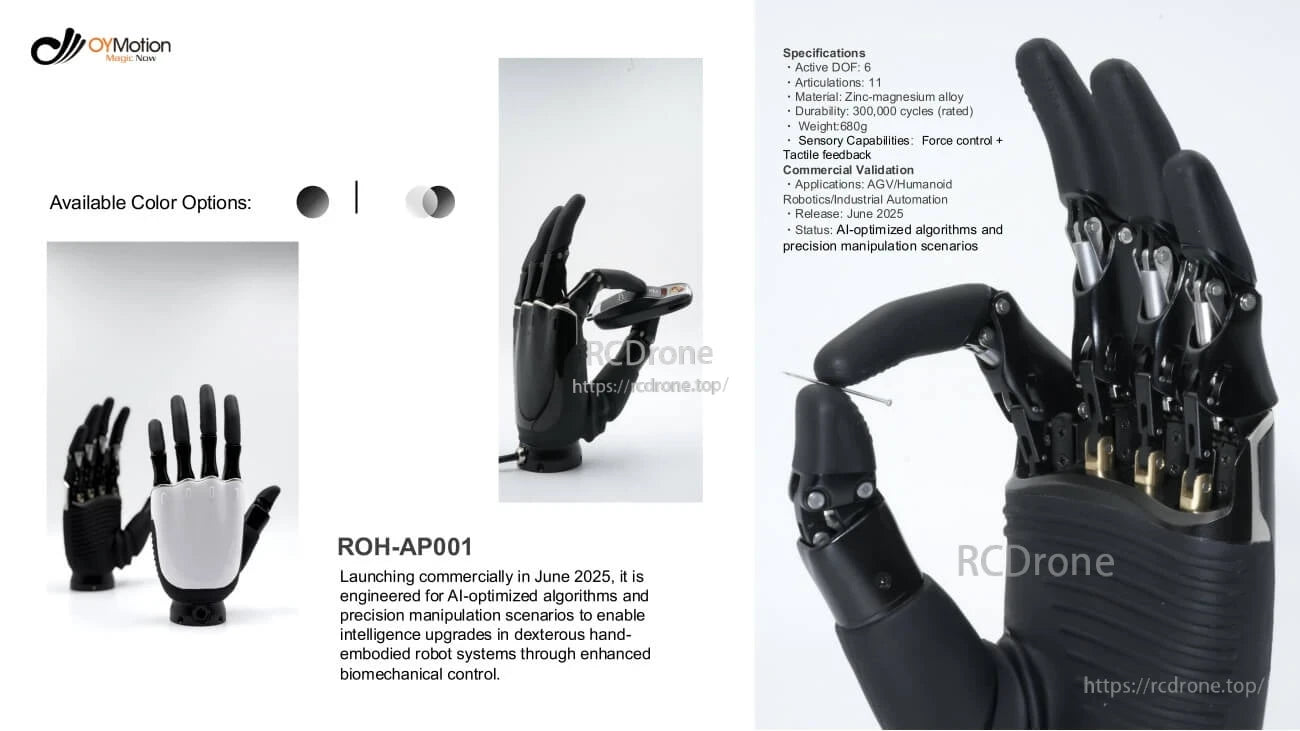
La main robotique habile OYMotion ROH-AP001 dispose de 6 DOF actifs, 11 articulations, une construction en alliage de zinc et de magnésium, une durabilité de 300k cycles, pèse 680g et offre un retour de force/tactile pour l'IA et les tâches de précision—lancement prévu en juin 2025.

La main robotique OYMotion ROH-AP001 dispose de doigts motorisés, d'un pouce motorisé, d'un gant en silicone et d'une actionnement intégré. Construite en aluminium, zinc, acier, silicone et plastique, elle comprend un bip, un poignet personnalisé, un protocole RS485, un design pliable et des ressorts de pression.
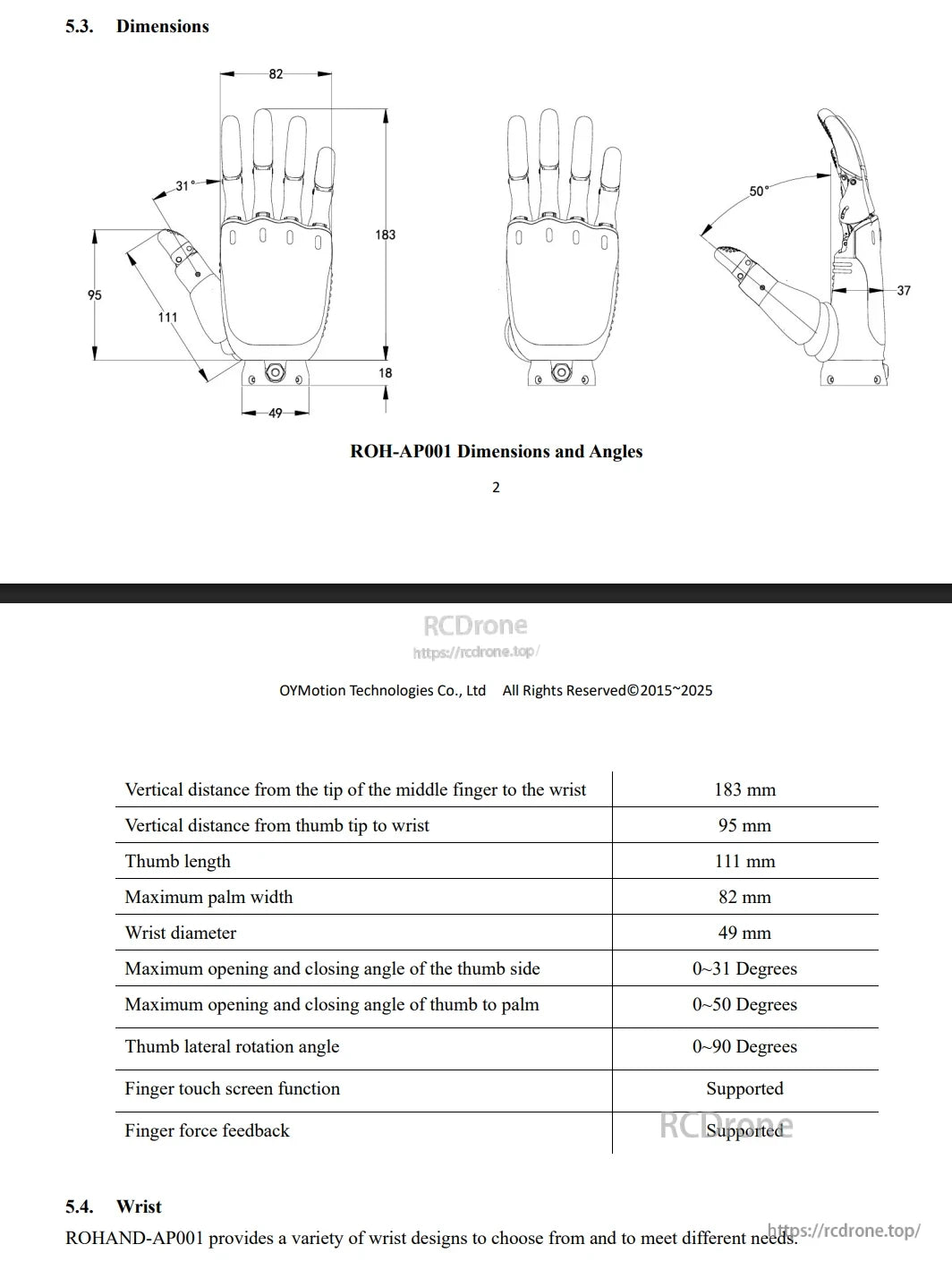
Les dimensions de la main robotique ROH-AP001 incluent une hauteur de 183 mm du doigt au poignet, 95 mm du pouce au poignet, 111 mm de longueur du pouce, 82 mm de largeur de la paume, 49 mm de diamètre du poignet. Angles du pouce : 0-31° latéral, 0-50° vers la paume, 0-90° de rotation. Prend en charge l'écran tactile et le retour de force.
La main robotique OYMotion ROH-AP001 fonctionne entre -10°C et +40°C, avec une humidité maximale de 85%. Durée de vie du design : 3 ans. Poids : 640g ±5g. Force active des doigts ≥0.5–1.0 Kgf ; charge passive jusqu'à 30 kg pour quatre doigts.
Related Collections





