SPÉCIFICATIONS du contrôleur de vol Pixhawk 2.4.8 PX4 PIX 32 bits
Utilisation : Véhicules et jouets télécommandés
Pièces/accessoires de mise à niveau : Cadre
Fournitures d'outils : Meulées
Paramètres techniques : Valeur 3
Périphériques/périphériques de télécommande : Télécommande
Âge recommandé : 12+a, 14+a
Pièces et accessoires RC : Contrôleurs de vitesse
Origine : Chine continentale
Numéro de modèle : Pixhawk 2.4.8
Matériau : Métal
Attributs des quatre roues motrices : Moteurs
Pour le type de véhicule : Avions
Nom de la marque : Readytosky
ReadyToSky est un fournisseur professionnel d'accessoires de modules FPV RC. Si vous souhaitez en savoir plus sur les options d'achat en gros ou en gros, n'hésitez pas à nous contacter.
Caractéristiques :
Pixhawk 2.4.8 prend en charge le dernier firmware officiel ardupilot et le firmware PX4.
1. Les processeurs avancés hautes performances ARM CortexM4 32 bits (2 Mo de flash) peuvent exécuter le système d'exploitation en temps réel NuttX RTOS ;
2. 14 sorties PWM/servo ;
3. Interface de bus (UART, I2C, SPI, CAN) ;
4. L'alimentation de secours intégrée et le contrôleur de secours tombent en panne, le contrôleur principal bascule vers le contrôle de secours en toute sécurité ;
5. Fournir des modes automatiques et manuels ;
6. Fournir une entrée d'alimentation redondante et un basculement ;
7. Lumières LED multicolores ;
8. Fournit une interface de buzzer multi-tons
9. Données de vol d'enregistrement sur micro SD ;
Spécifications :
Interface
1,5 UART 1, 2 compatible haute tension avec contrôle de flux matériel
2. 2 CAN
3. Entrée compatible récepteur satellite Spektrum DSM / DSM2 / DSM-X
4. Entrées et sorties compatibles Futaba SBUS
Entrée de signal 5.PPM
6.Entrée RSSI (PWM ou tension)
7.I2C
8.SPI
Entrée 9.3.3 et 6,6 VADC
10. Interface MICRO-USB externe
Écran OLED OSD Pixhawk pour Pixhawk 2.4.8 Affichage de vol de commande de vol PIX PX4 État de vol Connecté à l'interface I2C
Il convient au contrôle de vol de Pixhawk, etc. et est utilisé pour afficher les informations d'état de l'avion. Ce module est connecté à l'interface I2C de Pixhawk
Remarque : Pour mettre à niveau le micrologiciel de l'écran vers la version 3.5 ou supérieure, définissez NTF_DISPLAY_TYPE sur 1 dans Massion Planner et redémarrez Pixhawk.
COMMENT utiliser le module WIFI pour PIXHAWK ?
1.Comment se connecter ?
utilisez la ligne 6P pour vous connecter au contrôleur de vol Pixhawk.
En raison des différents micrologiciels, certains micrologiciels peuvent utiliser deux ports, certains micrologiciels ne peuvent utiliser qu'un seul des ports. Trouvez donc l'un des ports disponibles pour la connexion.
SI vous utilisez le firmware PX4, seul TELEM1 peut être utilisé, vous ne pouvez pas utiliser TELEM2.
Pour le firmware Ardupilot, il est recommandé d'utiliser le port TELEM2. Ou recherchez l'un des ports disponibles pour la connexion.
Pour le micrologiciel PX4, vous devez utiliser le port TELEM1.
2.Comment utiliser ?
Veuillez noter : lors de l'utilisation d'une connexion de radiotélémétrie Wifi, elle doit utiliser un module d'alimentation 3DR ou un ESC 5 V pour alimenter la commande de vol. L'USB ne peut pas être inséré car la priorité USB est supérieure à la radiotélémétrie. Si le câble USB est branché, il ne peut pas être utilisé pour la transmission de radiotélémétrie.
Le nom du point d'accès Wi-Fi est Drone, utilisez donc un téléphone ou un ordinateur pour vous connecter à ce point d'accès, le mot de passe est 12345678.
Remarque : certains appareils (par exemple, certains systèmes iPhone IOS) ne peuvent pas obtenir d'adresse IP automatiquement, vous devez le définir manuellement.
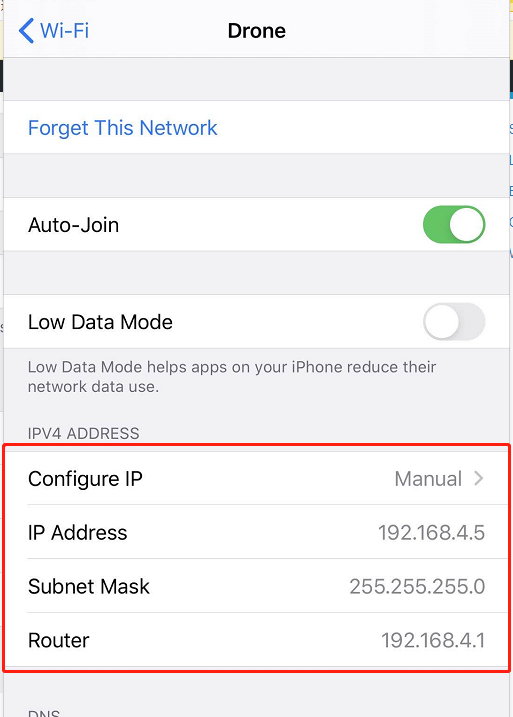
Définissez la configuration IP sur Manuel. Définissez l'adresse IP sur « 192.168.4.5 » ou autre, mais ne pouvez pas la définir sur « 192.168.4.1 », le dernier nombre ne peut pas dépasser 254. Définissez le masque de sous-réseau sur « 255.255.255.0 » (vous devez définir cette valeur, vous ne pouvez pas en choisir une autre). Définissez le routeur sur « 192.168.4.1 » (doit définir cette valeur, impossible autre)
Lorsque votre appareil se connecte avec succès à ce point d'accès, vous pouvez utiliser le navigateur pour visiter http://192.168.4.1 , vous pouvez modifier le paramètre.
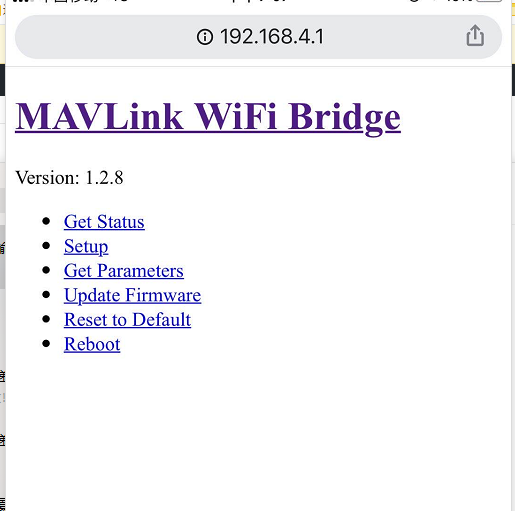
Remarque, le bouton est un bouton de réinitialisation et non un bouton de redémarrage. Lorsque vous appuyez sur le bouton, tous les paramètres seront définis par défaut si vous modifiez certains paramètres.
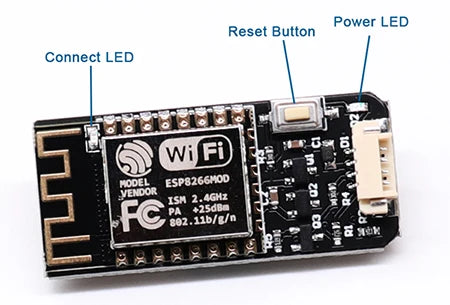
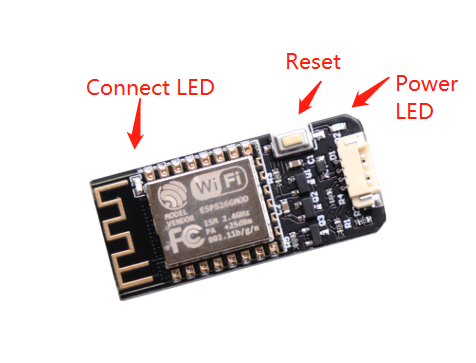
LED d'alimentation : à la mise sous tension, la LED rouge est allumée.
Connectez la LED : lorsque vous vous connectez avec succès au contrôle au sol (par exemple, Mission Planner ou Qgroundcontrol), la LED bleue clignote. lors de la déconnexion avec le contrôle au sol, la LED bleue est allumée.
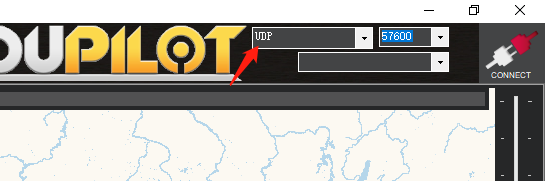
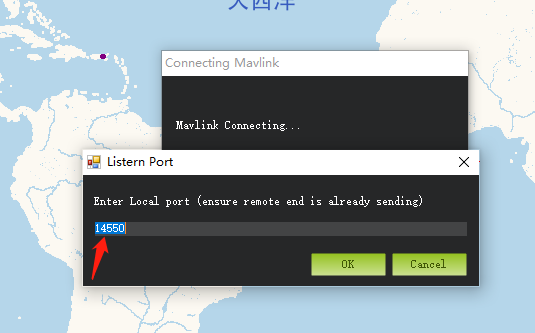
1.Comment utiliser le planificateur de mission ?
Tout d'abord, connectez votre PC au point d'accès Drone avec succès. Sélectionnez UDP. Cliquez ensuite sur le bouton « Connecter », utilisez le port 14550. Cliquez sur « Ok ». Il n'est pas nécessaire de choisir le débit en bauds. Le débit en bauds par défaut du module Wi-Fi est 57 600. Mais 115 200 ou autre peut également fonctionner.
2.Comment utiliser pour le téléphone
Pour Android : téléchargez qgroundcontrol (uniquement pour pixhawk, pas pour APM)
d'ici,http://qgroundcontrol.com/downloads/
Téléchargez DroidPlanner à partir d'ici,https://github.com/DroidPlanner/Tower/releases
Pour iPhone (IOS) : recherchez qgroundcontrol sur l'App Store.
qgroundcontrol (uniquement pour pixhawk, pas pour APM) peut se connecter automatiquement, DroidPlanner doit choisir le port « UDP » et « 14550 » avant de se connecter à groundcontrol.
WIFI V3.0 utilise un processeur 32 bits, prend en charge TCP et UDP
Site Web DroneBridge WIFI V3.0
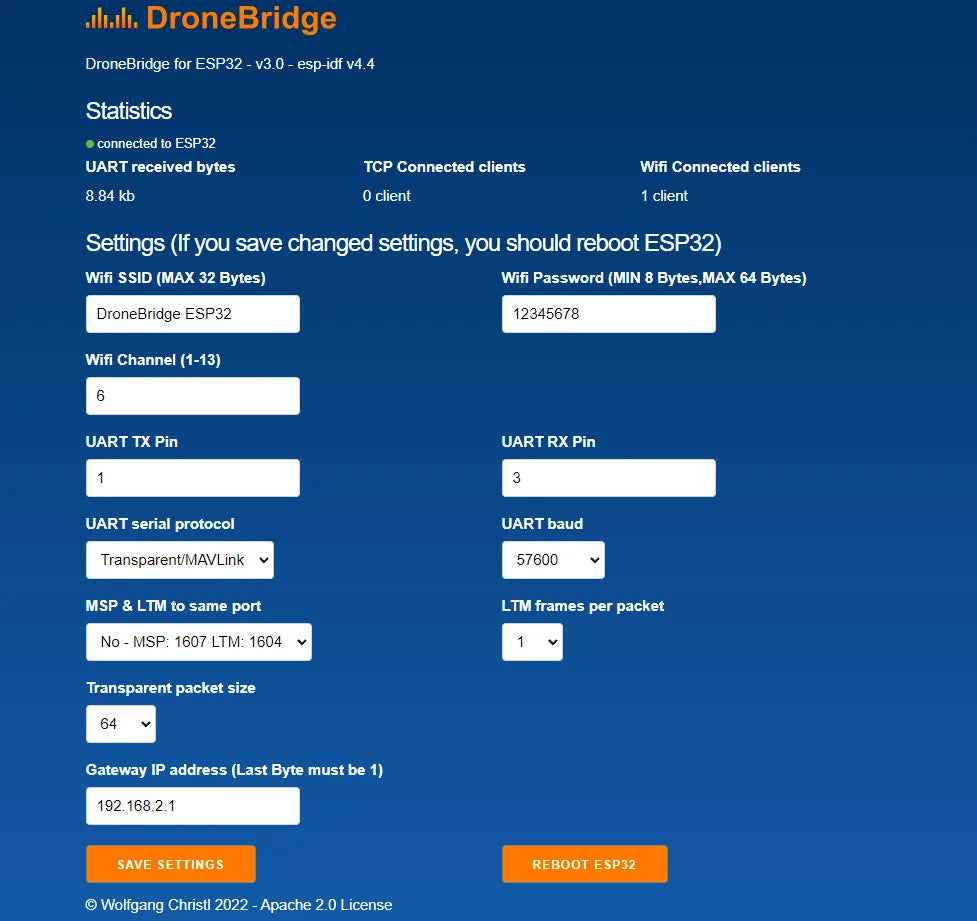
ulul; DroneBridge pour ESP32 v3.0 esp idf v4.4 Statistiques connectées à ESP 32 UART octets reçus TCP Clients connectés Mot de passe Wifi (MIN 8 octets, MAX 64 octets) si vous enregistrez les paramètres modifiés, vous devez redémarrer ESP33.
( envoyez-le selon votre choix)

Pixhawk 2.4.8 FC + Carte TF 4G + Support GPS MBN GPS + OSD + Module d'alimentation Amortisseur I2C PPM RGB Bouton de sécurité Buzzer Wifi Fils de télémétrie Ontk 'GPs Module PPM 1'

Le forfait comprend : Pixhawk 2.4.8 contrôleur de vol, une carte TF 4G, un amortisseur, un module I2C, un module PPM, un module RVB, un écran OLED, un bouton de sécurité avec buzzer et des fils pour tous les composants.
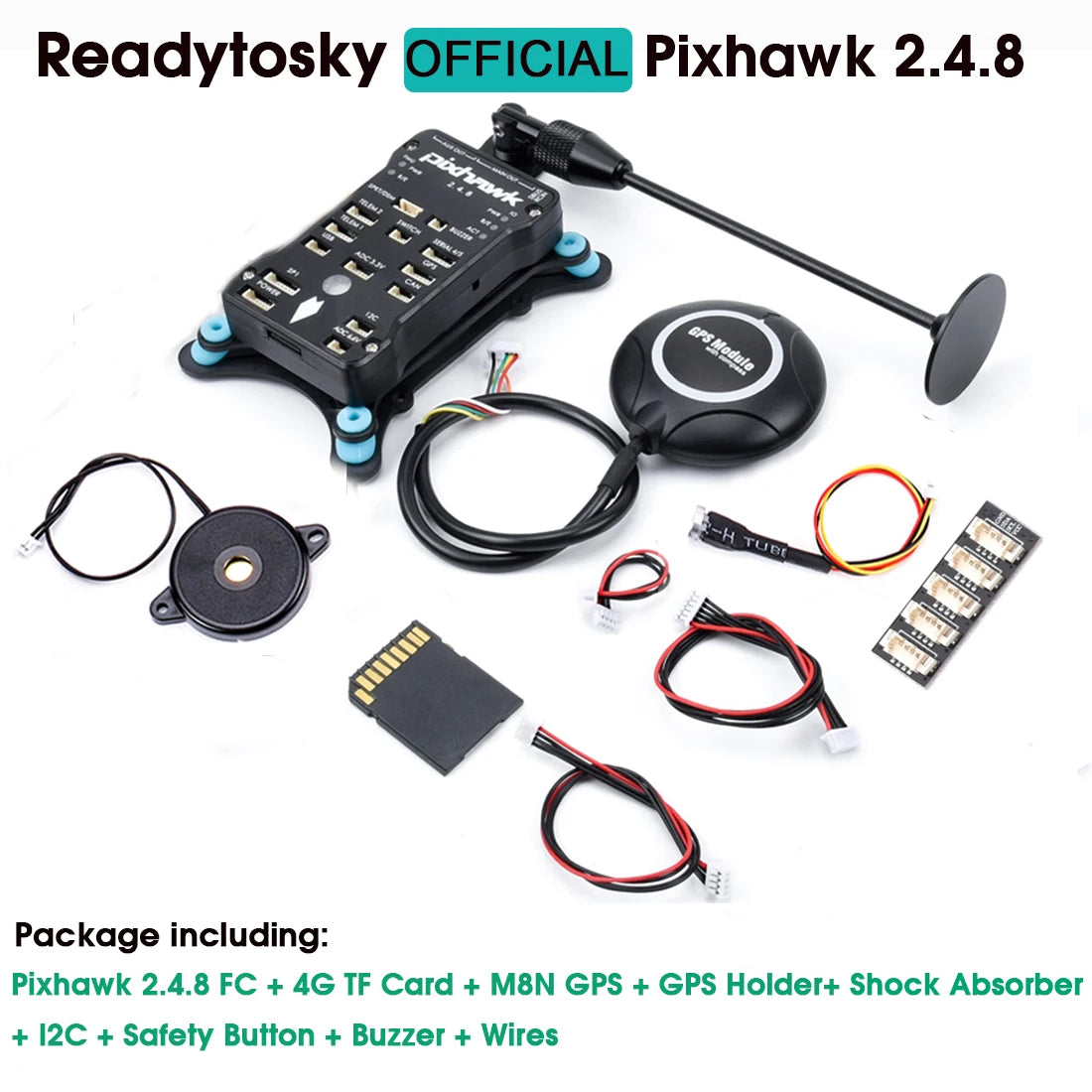
Le forfait comprend : Pixhawk 2.4. 8 contrôleur de vol, une carte TF 4G, un module GPS MBN, un support GPS, un amortisseur, un bouton de sécurité I2C, des fils de sonnerie et un module de télémétrie en option pour la transmission de données sans fil.

Le forfait comprend : Pixhawk Contrôleur de vol 2.4.8, carte TF 4G, amortisseur, écran OLED, module I²C, module PPM (modulation de position d'impulsion), bouton de sécurité avec buzzer et fils.

Ce vol Pixhawk 2.4.8 Le contrôleur est livré avec une carte TF 4G, un bouton de sécurité, un buzzer et des fils pour les sorties auxiliaires. Il dispose également d'un module TELEM avec deux entrées d'alimentation, un port série et des canaux ADC (convertisseur analogique-numérique). De plus, il dispose de capacités GPS et nécessite une alimentation pour fonctionner.

L'étalonnage VCC, GPS et carte SD est nécessaire en mode « Stabilisé » avec une tension de batterie de 11,32 V. De plus, aucune donnée GPS n'est disponible. Le pré-armement a été effectué et l'EKF (filtre de Kalman étendu) est activé.