Note:
PIXHAWK 2.4.8 prend en charge les derniers firmwares FMUV3 ardupilot et PX4.
1. Vous pouvez choisir une coque blanche ou noire pour le contrôleur de vol PIXHAWK, le matériel est le même. La coque blanche est plus belle. Si vous avez besoin d'une coque blanche, veuillez laisser un message.
2. Si le colis contient Module d'alimentation 3DR, par défaut, nous enverrons le module d'alimentation 3DR avec prise XT60, si vous en avez besoin, veuillez laisser un message.
3. Pixhawk propose de nombreux packages. Nous enverrons le colis selon votre sélection.
Pilote automatique Pixhawk PX4 Contrôleur de vol PIX 2.4.8 32 bits
Caractéristiques:
Pixhawk 2.4.8 prend en charge le dernier firmware officiel Arduinopilot et le firmware PX4.
1. Les processeurs hautes performances ARM CortexM4 32 bits avancés (2 Mo de mémoire flash) peuvent exécuter le système d'exploitation en temps réel NuttX RTOS ;
2. 14 Sortie PWM / servo ;
3. Interface de bus (UART, I2C, SPI, CAN) ;
4. L'alimentation de secours intégrée et le contrôleur de secours tombent en panne, le contrôleur principal bascule vers le contrôle de secours qui est sécurisé ;
5. Fournir des modes automatiques et manuels ;
6. Fournir une alimentation d’entrée et de secours redondante ;
7. Lumières LED multicolores ;
8. Fournir une interface de buzzer multi-tons
9. Enregistrement des données de vol sur carte Micro SD ;
Caractéristiques:
Interface
1,5 UART 1, 2 compatible haute tension avec contrôle de flux matériel
2. 2 PEUT
3. Entrée compatible avec le récepteur satellite Spektrum DSM / DSM2 / DSM-X
4. Entrées et sorties compatibles Futaba SBUS
5. Entrée de signal PPM
6. Entrée RSSI (PWM ou tension)
7.I2C
8.SPI
Entrée 9,3,3 et 6,6 V CC
10.Interface micro USB externe
Module GPS M9N
M9N est un module GPS couramment utilisé dans les véhicules aériens sans pilote, avec les caractéristiques et applications suivantes :
Positionnement de haute précision : le M9N adopte une technologie GNSS avancée, prend en charge plusieurs systèmes de navigation par satellite et peut fournir des informations de positionnement de haute précision. Pour les véhicules aériens sans pilote, il peut réaliser un positionnement et une navigation précis.
Prise en charge multi-systèmes : le M9N prend en charge plusieurs systèmes de navigation par satellite, notamment GPS, GLONASS, Galileo, BeiDou, etc. Cela permet aux drones de recevoir plusieurs signaux satellites simultanément, améliorant ainsi la précision et la fiabilité du positionnement.
Positionnement rapide : le M9N a des temps de démarrage à froid et à chaud rapides, ce qui permet d'obtenir rapidement des signaux satellites et d'effectuer un positionnement, ce qui le rend crucial pour le décollage rapide et l'exécution des tâches des véhicules aériens sans pilote.
Forte capacité anti-interférence : le M9N a d'excellentes performances anti-interférences, qui peuvent fonctionner de manière stable dans des environnements électromagnétiques complexes et ne sont pas sensibles aux interférences d'autres appareils électroniques.
Dans les applications de drones, le M9N peut être utilisé dans les aspects suivants :
Positionnement et navigation : le M9N fournit des informations précises sur la position et la vitesse pour aider les drones à obtenir une navigation et un contrôle de vol précis.
Navigation par points de cheminement : en saisissant des informations de points de cheminement prédéfinies dans le M9N, les véhicules aériens sans pilote peuvent voler automatiquement en fonction de l'itinéraire, réalisant ainsi des tâches de navigation par points de cheminement autonomes.
Collaboration multi-aéronefs : plusieurs drones peuvent utiliser le module M9N pour le positionnement et la synchronisation afin de réaliser des applications telles que le vol collaboratif en équipe et le vol en formation.
Retour au retour : le M9N peut fournir des informations de positionnement de retour précises, permettant au drone de revenir en toute sécurité au point de décollage ou au point de retour prédéfini.
M9N peut rechercher davantage de satellites à l'extérieur avec une plus grande précision, une vitesse de recherche plus rapide et une meilleure stabilité. (Le nombre spécifique de recherches d'étoiles est déterminé par l'environnement à ce moment-là.)
Détails du Pixhawk PX4 avec GPS M9N
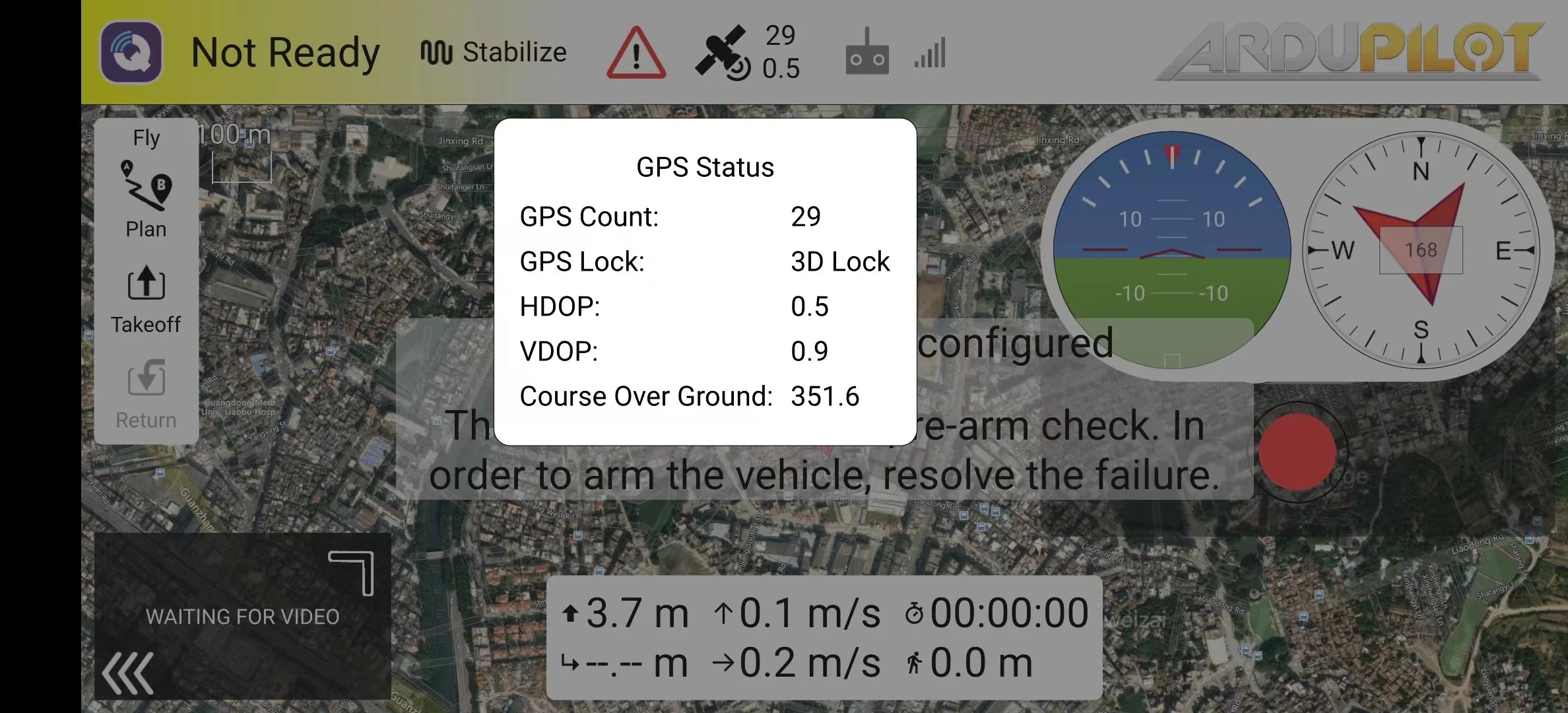
Pas prêt pour le pilote automatique. Stabilisez 2,5 ARDUINO Fly Road Linxing Road Statut GPS : Shuitangshan, Lr Nombre GPS : 29/10/10 Plan W-168. Verrouillage GPS : Verrouillage 3D 10 degrés. HDOP : 0,5. Décollage VDOP : 0,9. Configuré pour la navigation dans le Guangdong Mile. Cap au sol : 351,6. Hôpital universitaire de Liaobu Retour, vérification : attente de la vidéo. Visez à armer le véhicule, résolvez la panne.