







Kit de drones de course FPV Qav250 250 mm avec moteurs 2205 2300KV, contrôleur de vol F4, LittleBee 30A Blheli_s ESC et appareil photo 1200TVL
Kit de drones de course FPV Qav250 250 mm avec moteurs 2205 2300KV, contrôleur de vol F4, LittleBee 30A Blheli_s ESC et appareil photo 1200TVL
RCDrone
Impossible de charger la disponibilité du service de retrait

Emballage inclus:
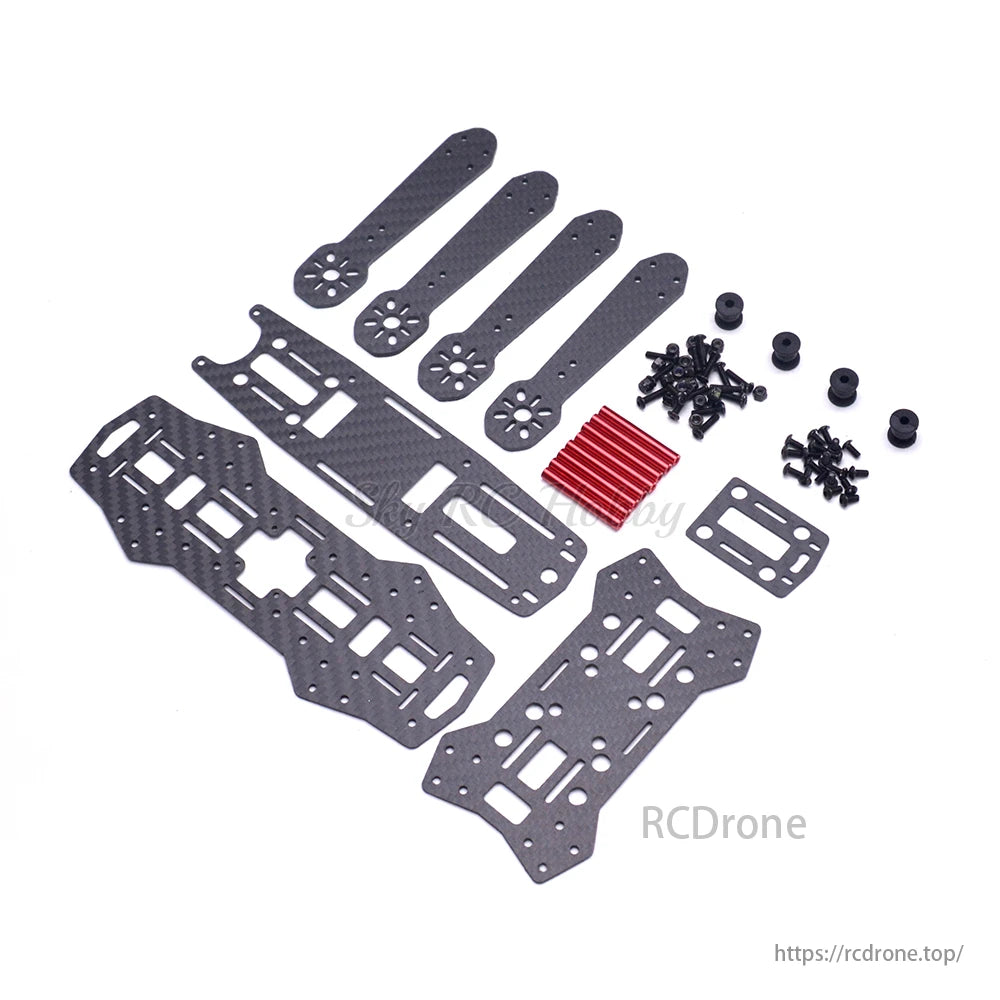
1 x kit de cadre en fibre de carbone ZMR250
4 moteurs RS2205 2300 kV
4 contrôleurs Littlebee 30A (Remarque : il existe deux types d'ESC Littlebee 30A, nous l'expédierons au hasard.)
1 x F3 Acro / Contrôleur de vol F4 V3S / F405 Plus (Envoyez-le selon votre choix)
1 x carte de distribution d'alimentation
1 caméra 1200TVL
4 hélices 5045
1 x UBEC
1 x sangle de batterie
Kit cadre en fibre de carbone QAV250 250 mm :
Caractéristiques:
- Matériau principal : Fibre de carbone intégrale
- Avec amortisseur en caoutchouc pour diminuer les vibrations pendant le vol
- Entretoise en alliage d'aluminium, légère, fiable
- Empattement : 250 mm
- Poids : 136g±2

Contrôleur de vol F3 ACRO :
Caractéristiques
• E/S sans compromis. Utilisez toutes les fonctionnalités à tout moment ; par exemple, connectez votre OSD + SmartPort + SBus + GPS + LED Bande + Surveillance de batterie + Sonar + 8 moteurs - tout en même temps !
• Enregistreur de vol de type boîte noire haute capacité intégré - optimisez votre réglage et voyez les résultats de votre configuration sans conjectures (Deluxe).
• Processeur STM32 F3 de nouvelle génération avec unité matérielle à virgule flottante pour des calculs de vol efficaces et plus rapides
Noyau ARM-Cortex M4.
• Conception empilable - parfaite pour l'intégration avec les OSD et les tableaux de distribution d'alimentation.
• 16 lignes d'E/S PWM pour ESC, servos et récepteurs hérités. 8 disponibles sur embases à broches standard. 8 via le côté connecteurs montés.
• Prise en charge complète des ESC OneShot pour un réglage PID facile et une réponse plus précise.
• Compatible avec les récepteurs SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM et PWM. Aucun onduleur externe requis. (intégré).
• Sortie dédiée pour LED programmables - idéale pour l'orientation, la course et le vol de nuit.
• Port I2C dédié pour la connexion d'un écran OLED sans avoir besoin de batterie de vol.
• Ports de surveillance de la batterie pour la tension et le courant.
• Prise en charge du sonar pour un maintien précis à basse altitude.
• Port buzzer pour avertissements et notifications sonores.
• Port de débogage convivial pour les développeurs (SWD) et sélection du mode de démarrage, chargeur de démarrage non briqué.
• Conception symétrique pour un câblage super ordonné.
• Câblage à l'aide de connecteurs à broches, de douilles JST-SH ou de pastilles de soudure. Utilisez des connecteurs à broches droits ou coudés.
• Baromètre monté sur le bas de la planche pour une isolation facile du vent.
• Temps de boucle jusqu'à environ 2 fois plus rapides que les cartes basées sur STM32F1 de la génération précédente.
• Configuration du contrôleur de vol via une interface graphique multiplateforme (Windows/OSX/Linux).
• Prend en charge une variété d'avions, de tricoptères, de quadricoptères, d'hexacoptères, d'octocoptères, d'avions et plus encore.
Logiciel
Le SPRacingF3 exécute le logiciel de contrôle de vol (FC) open source Cleanflight qui bénéficie d'une communauté en constante croissance Des développeurs et des utilisateurs amicaux. Être open source signifie que vous aussi pouvez contribuer au système.
Cleanflight est livré avec un manuel détaillé qui est révisé et maintenu par les développeurs de Cleanflight et Communauté. Finies les pages wiki obsolètes et les informations de seconde main.
Assurez-vous de vous référer au manuel correspondant à la version de votre micrologiciel.
Histoire
Le matériel a été conçu par le développeur principal de Cleanflight, Dominic Clifton, pour être plus performant que le Cartes basées sur STM32F1 après avoir entendu les commentaires des utilisateurs, des contributeurs et des meilleurs pilotes de Cleanflight.
Le non-respect de ces avertissements annulera votre garantie et détruira votre vol. contrôleur.
• Respectez la polarité à TOUT MOMENT. Vérifiez et revérifiez avant de mettre sous tension.
• ÉTEIGNEZ l’appareil avant de le débrancher, de le brancher ou d’effectuer toute connexion.
• Connectez une seule SOURCE d'alimentation aux broches VCC / Ne connectez pas plus de une source d'alimentation à deux ou plusieurs broches VCC. par exemple si vous utilisez des ESC avec les BEC, retirez ensuite le fil ROUGE central de tous les connecteurs ESC sauf un.
• Ne connectez pas GND, VCC ou 3,3 V entre eux (court-circuit).
• Ne connectez pas GND, VCC ou 3,3 V à aucune entrée ou sortie, sauf indication contraire.
• Ne connectez aucune entrée ou sortie à une autre entrée ou sortie, sauf indication contraire.
déclaré.
• L'alimentation 3,3 V est destinée uniquement à une utilisation à faible courant. 100 mA MAX.
• Ne laissez pas de saleté/poussière/colle/etc. pénétrer dans le capteur de pression (baromètre).
• Gardez les aimants éloignés du contrôleur de vol.
AVERTISSEMENTS
CONSEILS GÉNÉRAUX
Suivez les conseils ci-dessous pour de meilleures performances et une longue durée de vie de votre contrôleur de vol :
• Appliquez de la résine/colle pour renforcer les connecteurs JST-SH - aide si vous écrasez votre avion.
• Il est recommandé d’utiliser un boîtier/une boîte pour le contrôleur de vol.
• Installez de la mousse à cellules ouvertes sous le capteur de pression - en intercalez-en une partie entre le FC et cadre.
• Acheminez les fils du moteur/de la batterie le plus loin possible du capteur de boussole (magnétomètre) que possible.
• Installez les broches du cavalier BOOT uniquement si vous en avez besoin.
• Il est recommandé d'utiliser des embases à broches à code couleur (non fournies), en particulier pour VBAT en-têtes.
• Faites tout votre possible pour éviter que les vibrations n’atteignent le capteur accéléromètre/gyroscope.
Spécifications :
* Carte 36x36mm avec trous de montage de 30,5mm.
* Processeur STM32F3.
* Accéléromètre/gyroscope MPU6050
* Prise MicroUSB.
* 4x prises JST-SH 4 broches (I2C, SWD, 2xUART)
* 2 prises JST-SH 8 broches (PPM, PWM, SERIAL RX, GPIO, ADC, 3V, 5V, GND)
* 8x trous traversants à 3 broches pour embases à broches pour connexions ESC/Servo.
* 2x trous traversants à 4 broches pour embases à broches pour 2x ports série.
* 2x trous traversants à 2 broches pour les embases à broches pour la tension de la batterie et le buzzer.


Spécifications du contrôleur de vol F4 V3S Plus :
Micrologiciel : OMNIBUSF4SD
Taille : 36x36mm
Trous de montage : 30,5 x 30,5 mm
Microcontrôleur STM32 F405
Prise en charge Dshot
OSD par glisser-déposer configuré via Betaflight
MPU : MPU6500 / MPU6000 (Envoyer au hasard)
Ports SBUS / PPM et Spketrum DSMX
Boîte noire pour carte MicroSD
Baro (BMP280)
5v3a 9V3A BEC
Filtres vidéo intégrés (seulement 5 V vers VTX et caméra)
Doté d'un processeur F4, d'un OSD Betaflight intégré, d'une boîte noire MicroSD, d'un sbec 5v3a, d'un filtre vidéo, vous réglerez les pid avec votre émetteur et
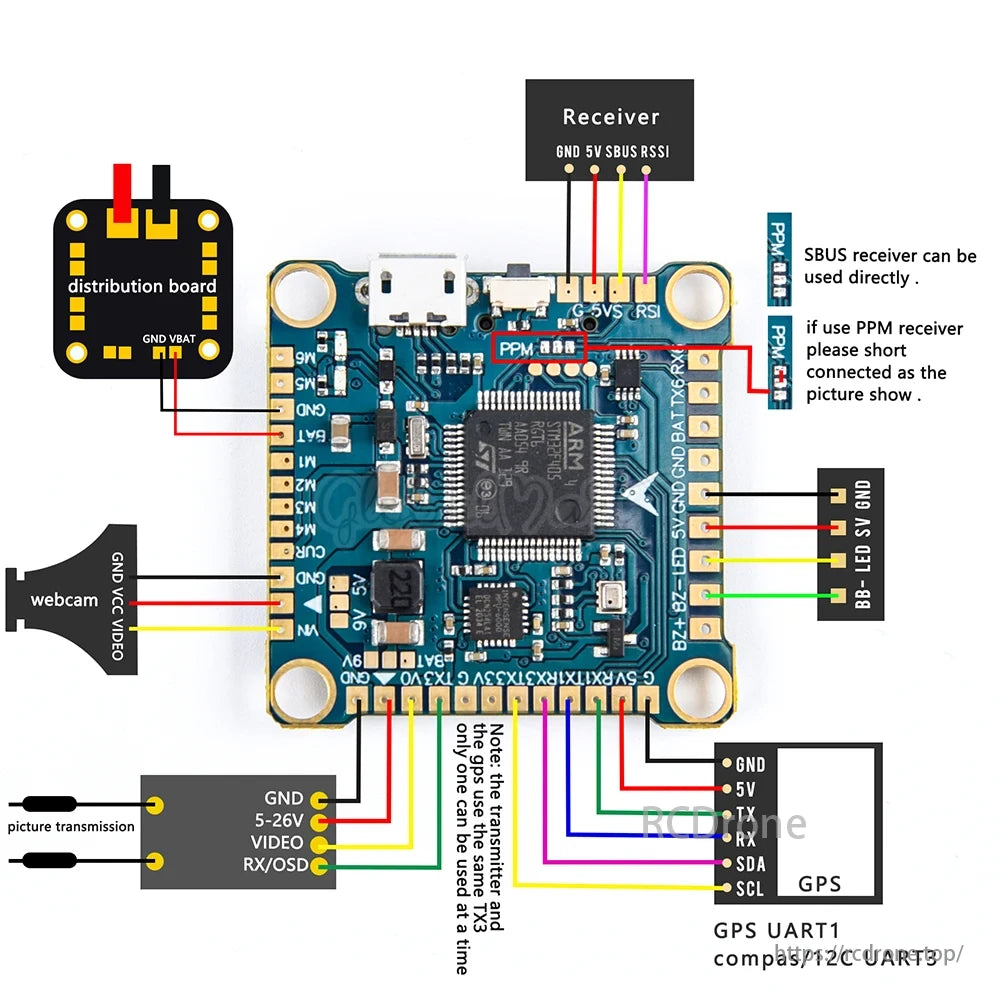
Schéma de câblage du drone FPV QAV250. Connexion du tableau de distribution, de la webcam, de la transmission d'images, du récepteur (SBUS/PPM) et du GPS. UART1 pour le GPS et UART3 pour la boussole/I2C.

Contrôleur de vol F4 V3S Plus pour drone FPV QAV250. Doté d'un port USB, de plusieurs connecteurs et de broches étiquetées pour une intégration et un contrôle faciles.
Paramètres du produit :
Microcontrôleur : STM32F405RGT6 168 MHz
Gyroscope : Mpu6500
Baromètre:Bmp280
Affichage à l'écran : Affichage à l'écran Betaflight SPI Affichage à l'écran DJI HD (UART5)
Boîte noire : 16 Mo
6x UART : UART 1/2/3/4/5/6
4 sorties PWM
1x I2C
2x LED pour FC STATUS (bleu) et indicateur 3,3 V (rouge) et indicateur 5 V (rouge) et indicateur 9 V (rouge)
USB Type-C (USB 2.0)
1x connecteur JST-SH1.0_8 broches (Gnd/Vbat/S1/S2/S3/S4/Curr/Rx3)
1x connecteur JST-SH1.0_6 broches (9 V/GND/T5/R5/GND/R2)
Alimentation filtrée VTX 9V
L'OSD DJI FPV est pris en charge par n'importe quel UART de rechange
LED : 4 pads LED indépendants, prise en charge de la sortie de lampe de programmation WS2812.
Récepteur : prend en charge les récepteurs Sbus, crsf, ibus, SBUS, XBUS,
L'entrée du récepteur par défaut est UART2 (vous pouvez souder ELRS RX sur UART2).
Puissance : Tension d'entrée : 3-6S
BEC : Le BEC double canal 5 V/10 V 3 A max prend en charge une alimentation électrique stable côté ciel de DJI
LDO 3,3 V : max. 1 A
Micrologiciel FC : Micrologiciel BetaFlight : DAKEFPVF405
Micrologiciel INAV : DAKEFPVF405
Montage:
Taille d'installation : 30,5 mm × 30,5 mm Le trou d'installation est M4 et prend en charge l'installation de la colonne d'amortisseur
Taille extérieure 36 mm × 36 mm
Poids des commandes de vol : 6,9 g
Capteur de tension embarqué pour commandes de vol.



Moteur RS2205 2300kv :
Remarque : En raison des différents lots de production, il existe deux types de conception du moteur, nous enverrons le moteur au hasard.

Quatre moteurs de drone FPV QAV250 de Ready Tosky, dotés d'un design noir et rouge avec câblage visible pour l'assemblage du drone.

Remarque : il existe deux types d'ESC Littlebee 30A, nous l'expédierons au hasard.

Quatre contrôleurs de vitesse optiques LITTLEBEE 30A-S BLHeli_S de Favourite prennent en charge des batteries LiPo de 2 à 6 S. Compacts, ils sont équipés de connecteurs plaqués or. Les fils noir et orange indiquent les connexions d'alimentation. Ces contrôleurs de vitesse électroniques régulent la vitesse des moteurs des drones FPV, comme le QAV250, garantissant un contrôle précis et des performances optimales. Leur design élégant et leur construction robuste garantissent une fiabilité optimale pour les courses de drones hautes performances et la photographie aérienne. Idéal pour les passionnés en quête de qualité et de performance.

Contrôleurs BLHeli S préférés pour le drone FPV QAV250. LittleBee-Spring 30 A, compatible Dshot, compatible avec les batteries LiPo 2-6S. Quatre unités avec fils rouge, noir et blanc inclus. Design compact pour des performances optimales.

ESC BLHeli S LittleBee-Spring30A 2-6S LIPO Dshot préféré avec fils rouge, noir et blanc pour drone QAV250 FPV.

Related Collections







