RCDrone T5001-10 & TS5001-10 Servo moteur articulé sans balais 1N.m FOC double encodeur RS485/CAN 1:10 Actionneur de servo à engrenages pour robot
RCDrone T5001-10 & TS5001-10 Servo moteur articulé sans balais 1N.m FOC double encodeur RS485/CAN 1:10 Actionneur de servo à engrenages pour robot
RCDrone
Impossible de charger la disponibilité du service de retrait
Présentation
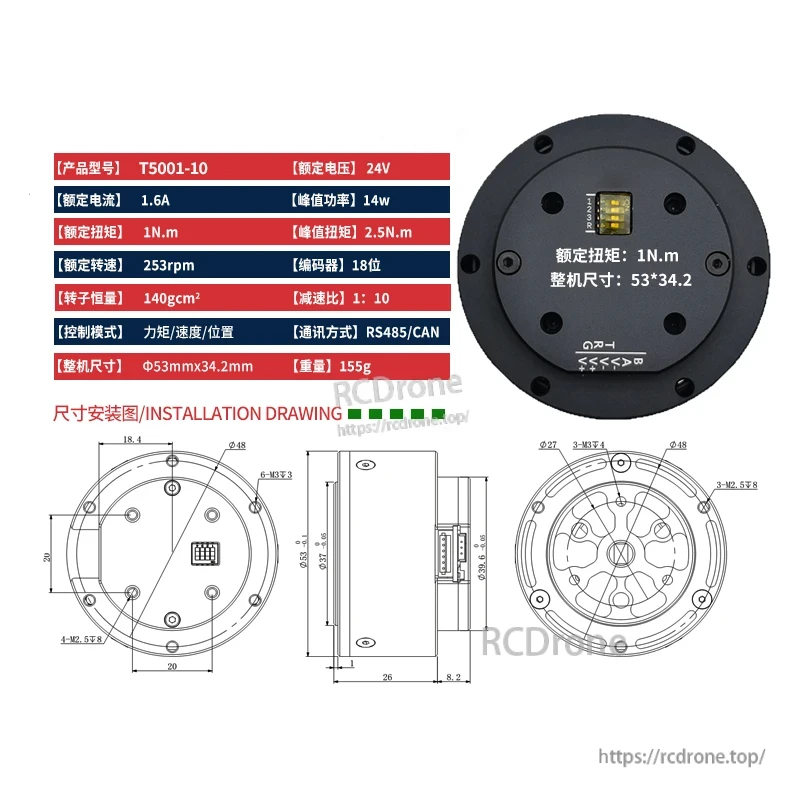
Les RCDrone T5001-10 et TS5001-10 sont des moteurs de module de joint servo brushless à entraînement MIT compacts et haute performance conçus pour des applications robotiques avancées. Avec un couple nominal de 1N·m, un couple de pointe de 2.5N·m, une vitesse nominale de 253–255 tr/min, et un rapport de réduction planétaire de 1:10, ces modules servo offrent une puissance élevée, un couple important et une grande précision dans un format léger. Équipés d'un encodeur absolu dual 18 bits (T5001-10) ou 18 bits + 14 bits (TS5001-10), ils fournissent un retour de position précis avec une calibration unique et un réglage du point zéro. La communication est prise en charge via l'interface RS485/CAN, garantissant une transmission de données fiable pour les systèmes de contrôle robotique.
Caractéristiques Clés
-
Retour d'Information de Haute Précision – Conception à 18 bits ou double encodeur pour un contrôle de mouvement précis.
-
Densité de Couple Élevée – Couple nominal de 1N·m, couple de pointe de 2.5N·m, boîtier compact de Φ53mm.
-
Contrôle FOC – Contrôle Orienté Champ pour un fonctionnement fluide et efficace.
-
Modes de Contrôle Multiples – Contrôle de couple, de vitesse et de position.
-
Communication de Niveau Industriel – RS485/CAN avec support UART pour une intégration flexible.
-
Construction Durable – Conçu pour la robotique, garantissant la stabilité lors d'une utilisation à long terme.
-
Léger & Compact – Seulement 155g (T5001-10) ou 183g (TS5001-10), idéal pour des conceptions à espace limité.
Spécifications techniques
| Modèle | T5001-10 | TS5001-10 |
|---|---|---|
| Tension nominale | 24V | 24V |
| Courant nominal | 1.6A | 1.6A |
| Puissance de crête | 14W | 14W |
| Couple nominal | 1N·m | 1N·m |
| Couple de crête | 2.5N·m | 2.5N·m |
| Vitesse nominale | 253tr/min | 255tr/min |
| Encodeur | 18 bits absolu | 18 bits + 14 bits absolu |
| Inertie du rotor | 140g·cm² | 140g·cm² |
| Rapport de réduction | 1:10 planétaire | 1:10 planétaire |
| Modes de contrôle | Couple / Vitesse / Position | Couple / Vitesse / Position |
| Communication | RS485 / CAN | RS485 / CAN |
| Dimensions | Φ53 × 34.2mm | Φ53 × 36mm |
| Poids | 155g | 183g |
Définition de l'interface
| Broche | Fonction |
|---|---|
| A/H | RS485-A ou CAN-H |
| B/L | RS485-B ou CAN-L |
| V- | Alimentation négative |
| V+ | Alimentation positive |
| T | Émetteur UART |
| R | Récepteur UART |
| G | GND de signal |
Applications
-
Robots à pattes – Contrôle de mouvement stable pour les quadrupèdes et les humanoïdes.
-
Robots industriels – Joints servo de haute précision pour bras robotiques.
-
Robots de patrouille – Unités de conduite fiables pour plateformes mobiles autonomes.
-
Robots médicaux – Légers et précis pour exosquelettes et dispositifs de réhabilitation.
Détails



Related Collections