




ROBOTERA XHAND 1 Main de robot - 12 DoF, bouts des doigts tactiles à 270°, prise de 80N, levée de 25 kg, EtherCAT/RS485, compatible ROS
ROBOTERA XHAND 1 Main de robot - 12 DoF, bouts des doigts tactiles à 270°, prise de 80N, levée de 25 kg, EtherCAT/RS485, compatible ROS
ROBOTERA
Impossible de charger la disponibilité du service de retrait
Aperçu
ROBOTERA XHAND 1 est une main robotique à cinq doigts avec des modules d'articulation à entraînement direct complet et 12 DoF actifs. La main est de la taille d'une main humaine (191 mm x 94 mm x 47 mm) et conçue pour une manipulation habile avec une détection tactile haute résolution, une force de préhension robuste et des interfaces conviviales pour la recherche en robotique et l'intégration.
Caractéristiques clés
- Architecture à entraînement direct complet avec des modules d'articulation à entraînement par engrenage intégrés, contrôlés par force (3 dans le pouce ; 9 sur les quatre autres doigts).
- 12 DoF entièrement actifs ; balancement latéral de l'index de +/-15° pour une manipulation complexe dans la main.
- Performance de préhension élevée : force au bout des doigts 15N ; force de préhension maximale 80N ; poids de préhension maximal jusqu'à 25 Kg (paume vers le haut) et 16 Kg (paume vers la gauche).
- Actionnement à grande vitesse supportant >2Hz de répétition ouverture/fermeture ; clics de doigt démontrés jusqu'à 10 CPS (Clics Par Seconde).
- Couverture tactile à 270° au bout des doigts avec cinq capteurs de matrice tactile tridimensionnelle ; résolution de la main entière 12x10 par doigt x 5.
- Détection de force tridimensionnelle incluant les forces tangentielles (X et Y) ; précision de repositionnement au bout des doigts +/-0,20 mm.
- Rétroaction avec amortissement <= 0,1 Nm ; contrôle de force en boucle de courant et contrôle de force-position pour une interaction conforme.
- Connectivité conviviale pour les développeurs : EtherCAT et RS485 (USB) ; compatible avec ROS1/ROS2, Ubuntu (Linux), architectures x86 et ARM, TwinCAT, et bras robotiques courants (y compris xARM, Realman, UR).
- Durabilité évaluée à 1 000 000 cycles de préhension à vide ; température de fonctionnement -20°C ~ 60°C.
Pour des demandes, un support d'intégration ou des achats en gros, contactez [email protected] or visitez https://rcdrone.top/.
Spécifications
| Paramètre | Valeur |
|---|---|
| Poids | 1100 g |
| Dimensions (L x l x H) | 191 mm x 94 mm x 47 mm (La taille de la main d'un adulte) |
| DoF Actif (Total) | 12 |
| DoF Passif (Total) | 0 |
| Allocation de DoF | Pouce x 3 ; Index x 3 ; Majeur x 2 ; Annulaire x 2 ; Auriculaire x 2 |
| Actionnement/Transmission du Pouce | Module d'articulation contrôlé par force à 3 entraînements par engrenage |
| Actionnement/Transmission des Quatre Doigts | Module d'articulation contrôlé par force à 9 entraînements par engrenage |
| Configuration des bouts de doigts | Bouts de doigts ronds ou arrondis |
| Balancement Latéral | -15°~+15° (Index) |
| Précision de positionnement répétée au bout des doigts | +/− 0.20 mm |
| Modes de contrôle | Contrôle de position (faible amortissement/haut amortissement), contrôle de force en boucle de courant, contrôle de force-position |
| Force au bout des doigts | 15N |
| Force de préhension maximale (main entière) | 80N |
| Poids de préhension maximal (paume à gauche) | 16 Kg |
| Poids de préhension maximal (paume vers le haut) | 25 Kg |
| Opposition maximale du pouce | Petit doigt |
| Vitesse de répétition ouverture/fermeture | >2Hz |
| Amortissement de retour (rétroaction possible) | <= 0.1 Nm |
| Couverture Tactile | Encerclement à cinq doigts à 270° |
| Nombre de Capteurs Tactiles | Cinq capteurs de matrice tactile tridimensionnelle à 270° sur cinq doigts |
| Résolution Tactile (main entière) | 12x10 (encerclement à 270° par doigt) x 5 |
| Dimensions de Détection Tactile | Détection de force tridimensionnelle (y compris les forces tangentielles X et Y) |
| Fréquence de Contrôle de la Main Entière | 83Hz |
| Taux de Communication | EtherCAT : 100MHz ; RS485 : 3MHz |
| Paramètres de Détection | Doigts : 120 forces de profilage tridimensionnelles ; Articulations : position, vitesse, température, courant (couple) |
| Paramètres de Contrôle | Position de l'articulation ; couple de l'articulation ; coefficient de rigidité de l'articulation ; coefficient d'amortissement de l'articulation |
| Cycles de préhension à vide | 1 000 000 cycles |
| Plage de température de fonctionnement | -20°C ~ 60°C |
| Tension de fonctionnement | 24V ~ 72V |
| Courant statique | 0.15A @48V, 7W |
| Courant maximum | 2.5A @48V, 120W |
| Interface de communication | RS485 (USB), EtherCAT |
Applications
- Téléopération : prend en charge la téléopération MR et gants ; téléopération Vision Pro ; gants Manus ; Pico/Meta Quest.
- Intégration de bras robotique et humanoïde : compatible avec xARM, Realman, UR et d'autres bras robotiques.
- Recherche et simulation : URDF précis, simulation de détection tactile ; adapté pour l'apprentissage par renforcement avec Isaac Gym et Mujoco.
- Interaction homme-machine et opération d'outils humains avec contrôle de force conforme.
Manuels
Xhand_adapter.stp
MH2.25_droit_stp.zip
MH2.25_gauche_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Manuel_Produit_1.0.pdf
X-Hand_1_Instructions_Démarrage_Rapide_Utilisateur_1.0.pdf
Détails

ROBOTERA XHAND1 main robotique avec entraînement direct complet, offrant une véritable liberté et une dextérité avancée.

XHAND1 par ROBOTERA : main humanoïde à cinq doigts avec 12 degrés de liberté, capteurs tactiles de 270° par doigt, force de préhension de 80N, capacité de charge de 25kg. Conçue pour des tâches complexes et la manipulation d'outils.

XHAND 1 : Première main habile avec des modules à entraînement direct par articulation. Comprend des moteurs sans fil haute puissance, des réducteurs à faible amortissement, des encodeurs de précision et des modules d'articulation intégrés développés en interne pour une manipulation robotique avancée.
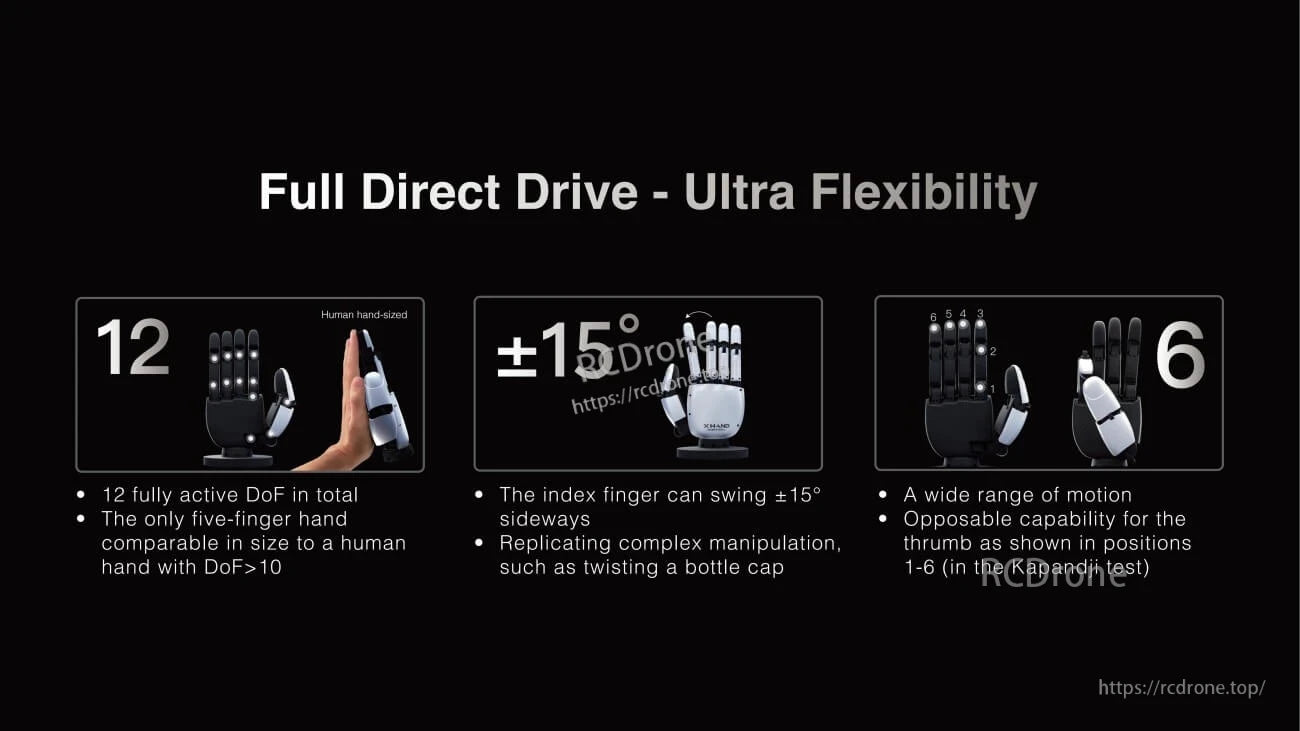
ROBOTERA XHAND 1 est une main robotique ultra-flexible de taille humaine avec 12 DoF actifs. Son index se déplace de ±15° sur le côté pour des tâches complexes, et le pouce offre six positions opposables pour une manipulation polyvalente.

ROBOTERA XHAND 1 : charge de 25 kg, force de préhension de 80 N, entraînement direct complet, surpassant les solutions similaires à liaison/tendon.

La main robotique à entraînement direct complet atteint 10 CPS avec une vitesse entraînée par engrenage, un couple supérieur à 1 Nm, surpassant les systèmes de liaison et de tendon pour des performances de jeu supérieures.

ROBOTERA XHAND 1 dispose de capteurs au bout des doigts à 270° avec >100 points et une précision de 0,05 N pour la détection de force 3D, tactile et de température, garantissant des performances de préhension supérieures.
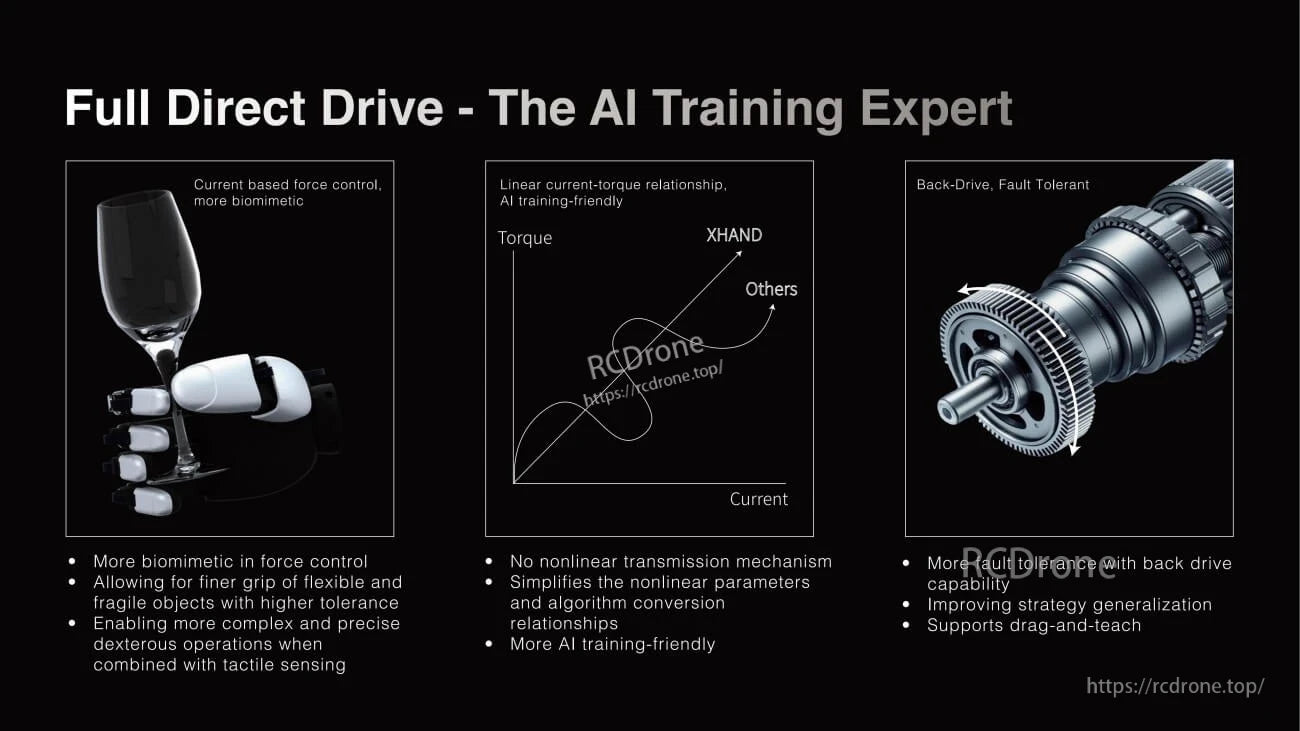
ROBOTERA XHAND 1 offre un contrôle de force biomimétique, une réponse couple-courant linéaire pour l'entraînement AI, et une tolérance aux défauts de retour—permettant une manipulation précise, des algorithmes simplifiés, un support de traînage et d'enseignement, et une généralisation améliorée des stratégies.
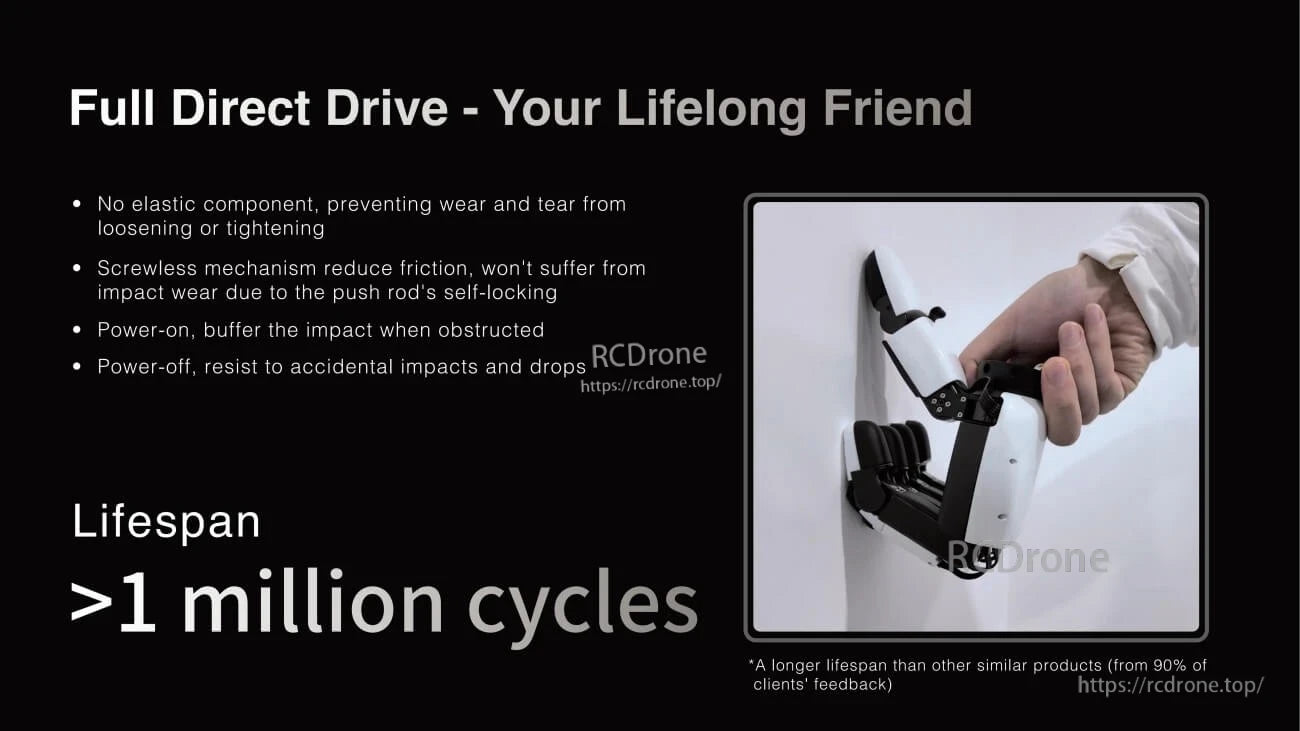
La main robotique à entraînement direct complet offre une durabilité sans pièces élastiques ni vis, un amortissement des chocs lorsqu'elle est sous tension, une résistance aux chutes lorsqu'elle est éteinte, et une durée de vie dépassant un million de cycles—surpassant des produits similaires selon les retours des clients.

ROBOTERA XHAND 1 prend en charge la téléopération MR et gants, compatible avec ROS1/ROS2 et Ubuntu sur x64/ARM. Dispose d'EtherCAT/TwinCAT/RS485 pour l'intégration avec xARM, Realman, bras robotiques UR. Offre une modélisation URDF précise et une simulation de détection tactile. Conçu pour des applications robotiques conviviales pour les développeurs avec flexibilité multiplateforme et protocoles de contrôle avancés.
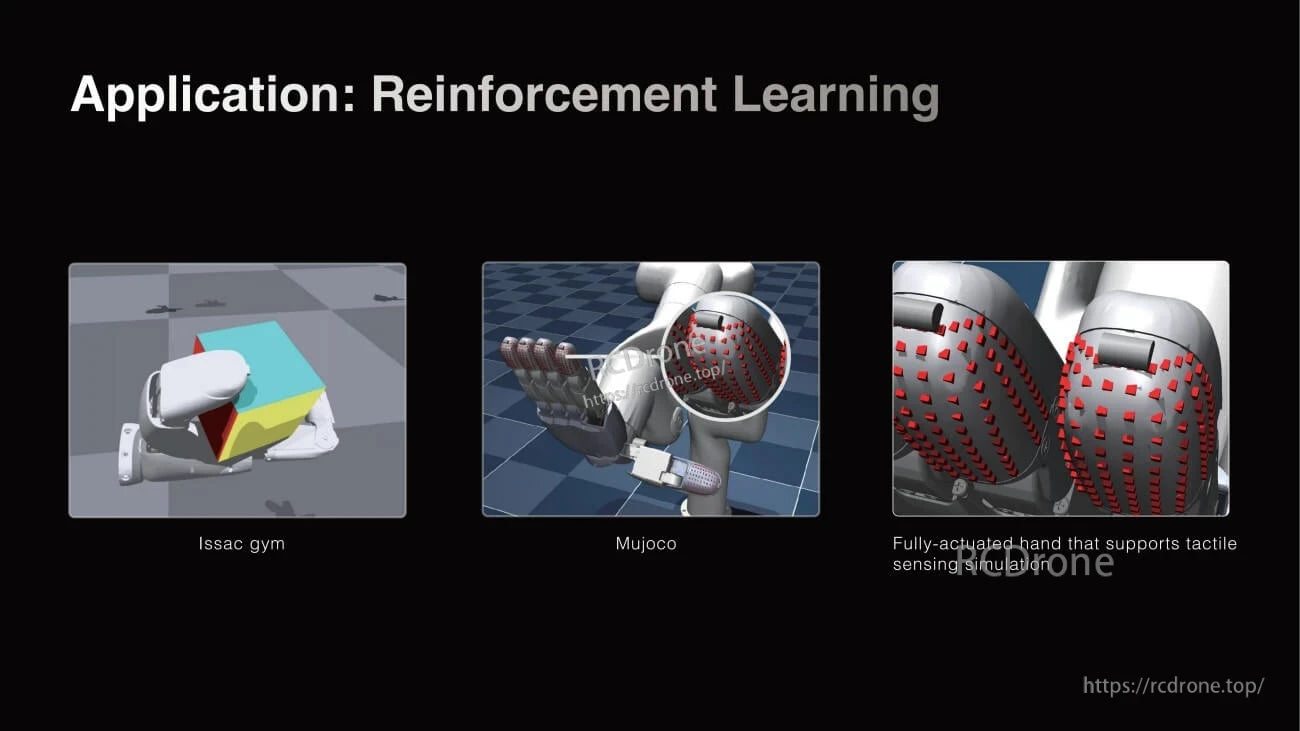
Applications d'apprentissage par renforcement : Issac gym, Mujoco, et main entièrement actionnée avec simulation de détection tactile pour un contrôle robotique avancé et des environnements de formation.
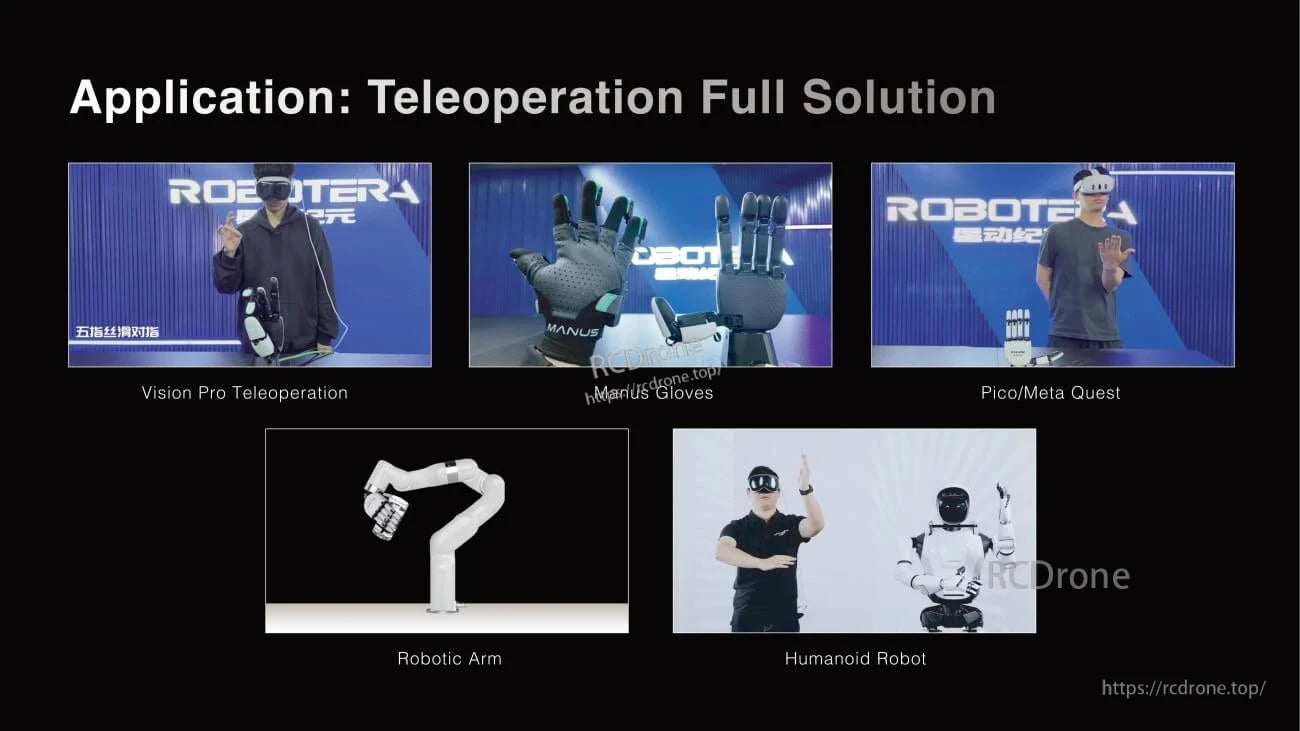
Solution de téléopération complète comprenant Vision Pro, gants Manus, Pico/Meta Quest, bras robotique et robot humanoïde pour un contrôle à distance avancé.
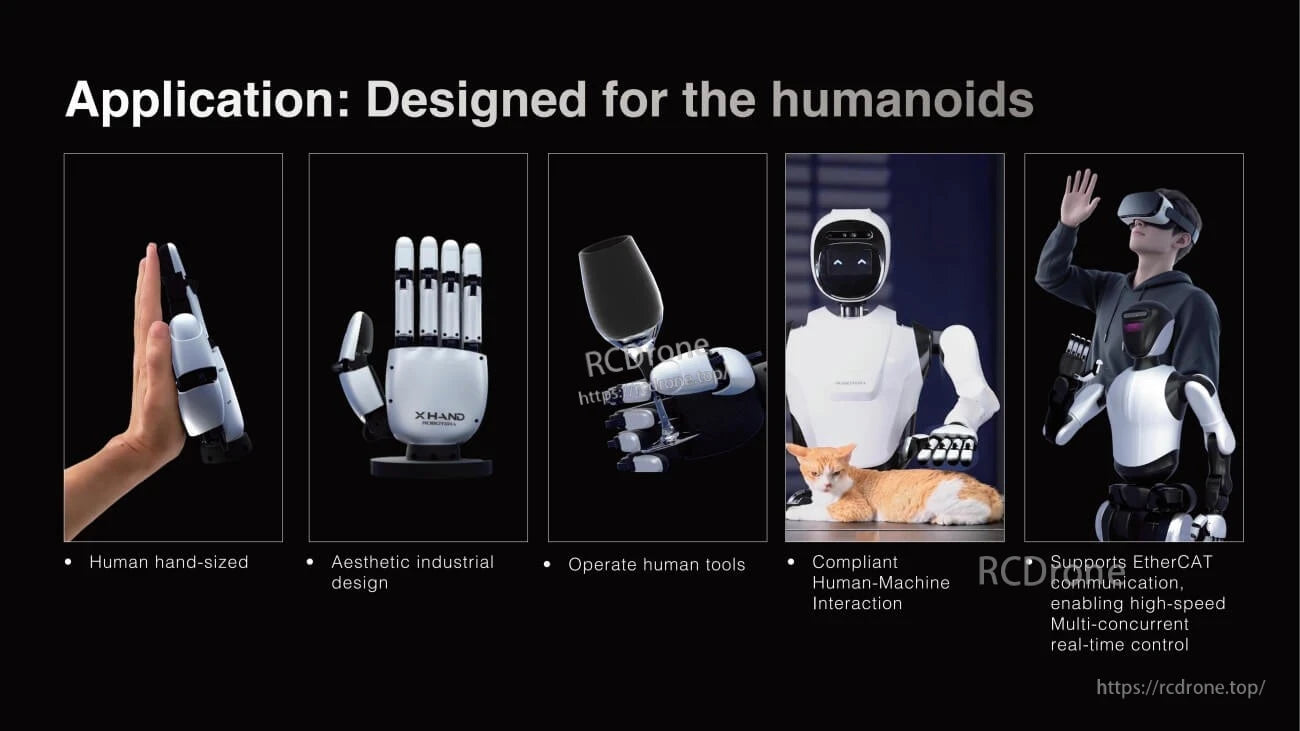
Main de robot de taille humaine avec un design esthétique, fonctionne avec des outils, permet une interaction conforme, prend en charge EtherCAT pour un contrôle en temps réel.
Related Collections




