



Drone programmable S2-F290 - Pixwawk Open Source ROS SLAM AI Niveau industriel de développement secondaire pour le défi des drones
Drone programmable S2-F290 - Pixwawk Open Source ROS SLAM AI Niveau industriel de développement secondaire pour le défi des drones
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Drone programmable S2-F290 est une haute performance drone de qualité industrielle conçu pour le développement secondaire et les défis des drones. Doté d'un capacité de charge utile de 2400 g, un Batterie 6S 6000mAh, et un distance de contrôle maximale de 10 km, il offre une précision avec Précision de positionnement GPS d'environ 1 à 2 m et Résistance au vent de niveau 3-4. Propulsé par le Contrôleur de vol Pixhawk 2.4.8 avec technologie open source ROS SLAM, le drone prend en charge des fonctions avancées telles que Cartographie LiDAR 3D, reconnaissance d'objets basée sur YOLO et vol en formation. C'est Cadre en fibre de carbone de 3 mm garantit une durabilité et une stabilité exceptionnelles, testées dans des conditions extrêmes. La plateforme est hautement personnalisable, offrant des fonctionnalités telles que la prise en charge de la station au sol QGC en chinois/anglais, une extensibilité modulaire et des didacticiels complets, ce qui la rend idéale pour les applications de recherche, de compétition et de développement.
Spécification
Aéronef
| Paramètre | Spécification |
|---|---|
| Nom | Drone programmable S2-F290 |
| Poids de la charge utile | 2400g |
| Modèle | S2-F290 |
| Précision du positionnement GPS | ≈1–2 m |
| Empattement | 290 mm |
| Poids maximal au décollage | 3190g |
| Batterie | Batterie standard 6S 6000 mAh |
| Distance de contrôle | 10KM (Recommandé à moins de 1000m) |
| Résistance au vent | Niveau 3–4 |
| Environnement d'exploitation | Intérieur/Extérieur |
| Résultats des tests d'endurance | Détails |
|---|---|
| Hélices | 7 pouces |
| Capacité de la batterie | 6S 6000mAh (5300mAh utilisé) |
| Environnement | Sans vent |
| Durée du vol | 11 minutes 30 secondes |
Contrôleur de vol
| Composant | Spécification |
|---|---|
| Processeur FMU | STM32H743 Cortex-M7, 480 MHz, 2 Mo de mémoire Flash, 1 Mo de mémoire SRAM |
| Processeur d'E/S | STM32F103 Cortex-M3, 72 MHz, 64 Ko de mémoire SRAM |
| Capteurs | Accéléromètre/Gyroscope : ICM-42688-P |
| Accéléromètre/Gyroscope : BMI055 | |
| Magnétomètre : IST8310 | |
| Baromètre: MS5611 | |
| Tension nominale | Tension d'entrée maximale : 6 V |
| Entrée d'alimentation USB : 4,75-5,25 V | |
| Entrée servo : 0-36 V | |
| Courant nominal | Télémétrie 1 Courant de sortie max. : 1 A |
| Courant combiné pour les autres ports : 1 A | |
| Données mécaniques | Dimensions : 53,3 × 39 × 16,2 mm |
| Poids : 39.2g | |
| Ports | - 14 sorties PWM (8 depuis IO, 6 depuis FMU) |
| - 2 ports série à usage général | |
| - 2 ports GPS | |
| - 1 port I2C | |
| - 2 ports CAN | |
| - Entrée RC pour Spektrum/DSM, S.BUS, CPPM, etc. | |
| - Port d'entrée d'alimentation | |
| Autres caractéristiques | Température de fonctionnement : -40–85°C |
Ordinateur de bord
| Composant | Spécification |
|---|---|
| Puissance de calcul | 40 TOPS |
| GPU | 32 cœurs Tensor avec GPU NVIDIA Ampere à 1024 cœurs |
| Processeur | Processeur Arm Cortex-A78AE v8.2 à 6 cœurs 64 bits, 1,5 GHz |
| BÉLIER | 8 Go 128 bits LPDDR5 68 Go/s |
| Stockage | Carte SD ou NVMe externe |
| Fréquence maximale du processeur | 1,5 GHz |
Télécommande
| Composant | Spécification |
|---|---|
| Tension de fonctionnement | 4,2 V |
| Courant de fonctionnement | 100 mA |
| Bande de fréquence | 2,4–2,483 GHz |
| Poids | 525g |
| Dimensions | 130 × 150 × 20 mm |
| Autonomie de la batterie | 20 heures |
| Port de chargement | MICRO-USB |
| Plage de contrôle | 7 KM |
GPS
| Composant | Spécification |
|---|---|
| Récepteur satellite | UBLOX-M9, 92 canaux |
| Boussole électronique | QMC5883L |
| Systèmes de satellites | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Chaînes satellite | 32 |
| Taux de mise à jour | 25 Hz |
| Précision de positionnement | 1,5 m CEP (environnement idéal) |
| Heure de démarrage | Démarrage à froid : 24 s, démarrage à chaud : 1 s |
| Dimensions | 25 × 25 × 8 mm |
| Poids | 12g |
Batterie
| Composant | Spécification |
|---|---|
| Type de connecteur | XT60 |
| Courant de charge recommandé | 3–5A |
| Capacité de la batterie | 6000 mAh |
| Tension nominale | 22.2V |
| Taux de décharge | 75C |
| Dimensions | 50 × 44 × 158 mm |
| Poids | 816g |
LiDAR
| Composant | Spécification |
|---|---|
| Longueur d'onde du laser | 905 nm |
| Gamme | 40 m à 10 % de réflectivité, 70 m à 80 % de réflectivité |
| Zone de détection minimale | 0,1 m |
| Champ de vision | Horizontal : 360°, Vertical : -7° à 52° |
| Sortie de nuage de points | 200 000 points/seconde |
| Taux de points | 10 Hz |
| Niveau de protection | IP67 |
| Pouvoir | 6,5 W (environnement à 25 °C) |
| Plage de tension | 9–27 V CC |
| Dimensions | 65 × 65 × 60 mm |
| Poids | 265g |
Caméra de profondeur
| Composant | Spécification |
|---|---|
| Technologie de profondeur | Double infrarouge |
| Angle de vision en profondeur | 87° × 58° (horizontal × vertical) |
| Résolution en profondeur | 1280 × 720 |
| Précision de la profondeur | < 2 % dans un rayon de 2 m |
| Profondeur Fréquence d'images | 90 images par seconde |
| Plage de profondeur | 0,3–3 m |
| Dimensions | 90 × 25 × 25 mm |
| Environnement d'exploitation | Intérieur/Extérieur |
Appareil photo mono-objectif
| Composant | Spécification |
|---|---|
| Résolution maximale | 2 MP (1920 × 1080) |
| Fréquence d'images maximale | 30 images par seconde |
| Champ de vision | ~90° |
| Longueur du câble | ~1.5 m |
| Dimensions | 35 × 35 × 30 mm |
Tableau des fonctions
| onction | Configuration de base | D435 en option | Module D435 + 4G en option |
|---|---|---|---|
| Maintien de l'altitude, vol stationnaire, retour à la maison | ✔ | ✔ | ✔ |
| Atterrissage, stabilisation, vol vers un point de cheminement | ✔ | ✔ | ✔ |
| Vol télécommandé | ✔ | ✔ | ✔ |
| Communication entre le contrôleur de vol et l'ordinateur de bord | ✔ | ✔ | ✔ |
| Reconnaissance et atterrissage du code QR | ✔ | ✔ | ✔ |
| Reconnaissance et dépôt d'objets | ✔ | ✔ | ✔ |
| Cartographie et évitement d'obstacles simultanés | ✔ | ✔ | ✔ |
| Cartographie et positionnement LiDAR 3D | ✔ | ✔ | ✔ |
| Reconnaissance d'objets basée sur YOLO | ✘ | ✔ | ✔ |
| Reconnaissance et suivi d'objets | ✘ | ✔ | ✔ |
| Télécommande 4G | ✘ | ✘ | ✔ |
Le forfait comprend
Configuration de base
- Cadre:Cadre en fibre de carbone F290
- Moteurs: 4× Moteur T F100 Kv1100
- ÉCHAP: 4× FlyFun T-rex 5 45A
- Hélices: 4 hélices à trois pales de 7 pouces
- Contrôleur de vol: Pixhawk6mini
- Batterie: Batterie standard 6S 6000mAh
- Chargeur: Chargeur de batterie 6S
- Ordinateur de bord: Module Jetson Orin Nano 8G + WIFI
- Disque SSD: 256G
- LiDAR: Livox MID360
- Caméra:Caméra USB grand angle 150°
- Télécommande: Cloud T10 (inclut le récepteur de données)
Configuration optionnelle : D435
Comprend tous les composants du Configuration de base, plus:
- Appareil photo à double objectif: D435
Configuration optionnelle : D435 + module 4G
Comprend tous les composants du Basique Configuration, plus:
- Appareil photo à double objectif: D435
- Module 4G
Détails
Drone programmable S2-F290
- ✔ Assistance technique, service après-vente sans tracas
- ✔ Fournit des exemples de concours, personnalisables
- ✔ Station terrestre mobile chinoise/anglaise
- ✔ Haute stabilité, haute performance
- ✔ Intérieur/Extérieur
Le S2-F290 est un drone de pointe conçu pour les courses de drones, spécialisé dans l'exploration et l'innovation.Conçu pour intégrer une technologie de pointe et une créativité illimitée, il est capable de s'adapter à divers environnements complexes, rendant l'exploration aérienne plus accessible et efficace.
Ce drone présente un design compact avec une puissance immense. Il offre une multitude d'exemples de compétition, permettant aux utilisateurs de maîtriser et d'optimiser rapidement ses performances. Équipé d'une station terrestre mobile chinoise/anglaise dédiée, il améliore considérablement la commodité d'utilisation du drone. De plus, il fournit des explications de code source compétitives et une personnalisation pour garantir que les utilisateurs peuvent atteindre les fonctionnalités souhaitées dans les plus brefs délais tout en excellant dans les scénarios de compétition.

Répondre aux besoins de développement / de concurrence / de recherche
| Catégorie | Détails |
|---|---|
| Connaissances de base sur ROS | - Télécommande |
| - Communication entre le contrôleur de vol et l'ordinateur de bord | |
| Fonctions de base | - Planification d'itinéraire |
| - Reconnaissance et positionnement du code QR | |
| - Patrouille autonome hors-bord | |
| Fonctions avancées | - Reconnaissance de code QR pour l'atterrissage |
| - Reconnaissance et suppression d'objets | |
| - Cartographie et évitement d'obstacles simultanés | |
| - Cartographie et positionnement LiDAR 3D | |
| - Reconnaissance d'objets basée sur YOLO | |
| - Transmission vidéo sur le Web | |
| - Vol en formation en extérieur | |
| - Formation Collaborative Terre-Air | |
| Fonctions optionnelles de l'appareil photo D435 | - Positionnement visuel VINS |
| - Reconnaissance et suivi d'objets basés sur YOLO | |
| Fonctions de communication 4G en option | - Télécommande 4G |
Évitement autonome des obstacles, assurance de sécurité complète
Utilisant le LiDAR 3D pour éviter les obstacles de manière autonome, le drone combine la planification d'itinéraire globale avec l'évitement dynamique des obstacles locaux pour détecter avec précision les obstacles dans toutes les directions. Il prend en charge l'arrêt automatique ainsi que le vol continu, permettant d'éviter de manière flexible les objets le long de la trajectoire de vol, garantissant ainsi une expérience de vol plus sûre.

Reconnaissance et atterrissage du code QR
Le drone active la caméra et le module de reconnaissance du code QR pour acquérir les informations de position en temps réel du code QR. Pendant la descente, le drone ajuste dynamiquement sa position, garantissant un alignement précis avec le champ de vision de la caméra avant de procéder à l'atterrissage.
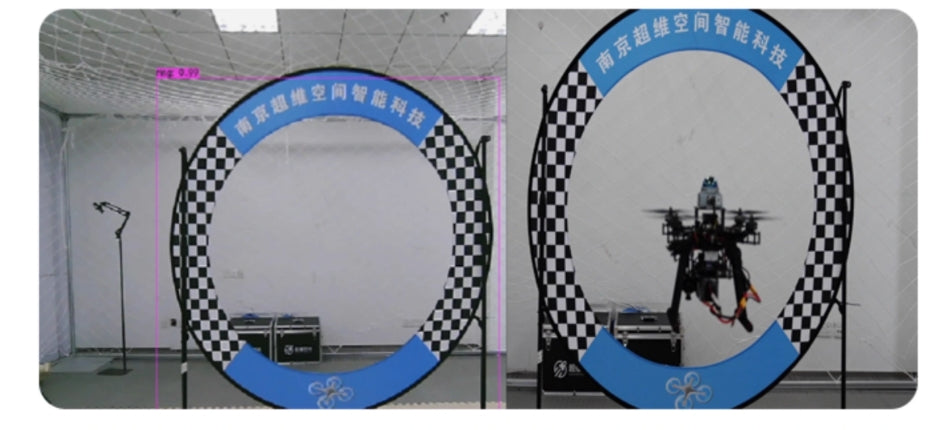
Reconnaissance d'objets YOLO
Le drone utilise YOLOv8 pour la reconnaissance d'objets, en acquérant les informations de position du cadre circulaire en temps réel. Il ajuste sa position de manière autonome et navigue dans le cadre circulaire.
Vol en formation en extérieur
Le drone utilise la technologie de formation en essaim, permettant le contrôle coordonné de plusieurs drones pour réaliser un vol en formation.En exploitant des algorithmes avancés de communication et de contrôle collaboratif, il facilite la communication et l'échange d'informations en temps réel entre les drones, en synchronisant leurs mouvements et leurs positions pour former une formation serrée.

Formation collaborative Terre-Air
Cette plateforme prend en charge la formation collaborative entre les drones terrestres et aériens. En exploitant un réseau local avec des structures topologiques pour l'interconnectivité des appareils, elle utilise la communication UDP et des protocoles personnalisés pour assurer une communication rapide et stable. Grâce au contrôle PID, elle permet un suivi synchronisé entre le drone principal et plusieurs drones esclaves, garantissant ainsi la stabilité de la formation et l'efficacité opérationnelle.

Exemple de concours
Fournit des scénarios de compétition exclusifs avec des conseils étape par étape, permettant aux participants de s'adapter facilement à différents types de compétitions.



Caractéristiques du drone programmable S2-F290
Rapport qualité/prix élevé
- Conçu pour les débutants afin de réduire la courbe d'apprentissage et de faciliter la maîtrise du fonctionnement du drone.
- Son prix abordable en fait le drone d'apprentissage idéal pour les étudiants et les passionnés.
Haute stabilité
- Testé dans diverses conditions extrêmes pendant trois ans.
- Équipé d'un cadre en fibre de carbone de 3 mm d'épaisseur pour une durabilité et une stabilité améliorées.
- Permet aux utilisateurs d'obtenir une reconnaissance dès leur première expérience de compétition.
Extensibilité
- Prend en charge la personnalisation avancée pour diverses applications.
- Compatible avec divers composants d'extension pour améliorer en permanence les performances et les fonctionnalités du drone.
Service après-vente sans souci
- Une équipe professionnelle offrant des conseils et un soutien complets.
- Offre des réparations gratuites pour les dommages matériels causés par des erreurs de fonctionnement pendant la période de garantie (hors accessoires et batteries).
Personnalisable
- Fournit un support pour le développement exclusif dans ROS et QGC.
- Prend en charge une précision élevée de plus de 98 % pour la cartographie et la navigation.
- Compatible avec les modules RTK/GPS, les logos et diverses fonctionnalités uniques.

Configuration de la station terrestre
Utilisation du contrôleur de vol Pixhawk 2.4.8
Équipé du dernier processeur standard STM32F427 32 bits et du baromètre MS5611, ce contrôleur de vol offre de nombreuses interfaces et un rapport qualité-prix élevé en tant qu'option open source.
1. Station terrestre QGC exclusive et entièrement personnalisée
- Atteint plus de 98 % de localisation en chinois.
- Prend en charge des fonctionnalités avancées telles que NTRIP.
2. Station terrestre mobile QGC
- Fournit une version mobile de la station au sol QGC, permettant un fonctionnement transparent à partir d'un smartphone.
3. Connexion directe Wi-Fi ou 4G
- Connectez-vous simplement via Wi-Fi pour fonctionner à l'aide d'un smartphone ou d'un ordinateur.
- Note:Le système « ezuav » indique qu'il est connecté à l'appareil mais ne peut pas fournir d'accès Internet.

Tutoriels complets et ressources entièrement open source
- Tutoriels d'utilisation extrêmement détaillés couvrant tous les aspects des fonctionnalités du drone S2-F290.
- Des documents entièrement open source, notamment :
- Présentations des logiciels et guides d'installation.
- Tutoriels pour les fonctionnalités de base et avancées, telles que la reconnaissance d'objets basée sur OpenCV, la cartographie 3D et le vol autonome hors-bord.
- Instructions de développement personnalisées pour la communication PX4 et MAVLink.
- FAQ de dépannage, configuration de l'environnement ROS et étapes opérationnelles.
Related Collections


