









Module d'articulation robotique SteadyWin GIM3510-8, réducteur planétaire 8:1, pilote CAN, double encodeur, 24V 60W
Module d'articulation robotique SteadyWin GIM3510-8, réducteur planétaire 8:1, pilote CAN, double encodeur, 24V 60W
SteadyWin
Impossible de charger la disponibilité du service de retrait
Aperçu
Le SteadyWin module d'articulation de robot compact GIM3510-8 est un actionneur d'articulation robotique intégré qui combine un moteur Aloha, un réducteur à vis planétaire 8:1, un pilote de communication intégré et des encodeurs doubles dans un boîtier cylindrique compact. Avec une alimentation nominale de 24 V (plage large de 12 à 40 V ou de 12 à 48 V selon la carte de pilote), une vitesse de sortie élevée allant jusqu'à 564,6 tr/min après réduction, et une communication CAN bus, il est conçu pour des robots humanoïdes agiles, des bras robotiques, des plateformes mobiles et d'autres systèmes multi-axes nécessitant un contrôle de mouvement précis en boucle fermée.
Caractéristiques clés
- Réduction planétaire à grande vitesse : réducteur planétaire 8:1 avec une vitesse de sortie nominale de 535,5 tr/min et un maximum de 564,6 tr/min (GDZ34), adapté aux articulations à mouvement rapide.
- Large plage de tension : Fonctionnement nominal à 24 V avec une plage d'entrée de 12 à 40 V (GDZ34) ou de 12 à 48 V (GDS34) pour une conception flexible du système d'alimentation.
- Sortie de couple efficace : Constante de couple jusqu'à 0,32 N.m/A avec un couple nominal allant jusqu'à 1,68 N.m et un couple de pointe allant jusqu'à 6,02 N.m, offrant une transmission de puissance efficace pour des articulations robotiques légères à moyennes.
- Driver intégré avec bus CAN : Carte driver intégrée (GDS34 ou GDZ34) prenant en charge la communication CAN pour un câblage simplifié et un contrôle en réseau.
- Retour d'information à double encodeur : Encodeur 14 bits sur le driver et un second encodeur sur l'arbre de sortie pour un retour d'information précis sur la position et la vitesse.
- Structure compacte : Seulement 46 mm de diamètre extérieur avec une longueur totale de 46,5 mm (sans driver) à 51,5 mm (avec driver), permettant des agencements multi-articulations denses.
- Durabilité environnementale : Classe de protection IP54, température de fonctionnement de -20°C à +80°C, et niveau de bruit inférieur à 60 dB.
- Fonctions de protection : La protection contre la surchauffe, la surtension et la surcharge aide à maintenir un fonctionnement sûr et fiable dans les systèmes robotiques à service continu.
- Robustesse mécanique : Supporte jusqu'à 75 N de charge axiale et 300 N de charge radiale sur l'arbre de sortie, avec un jeu de réducteur de 15 arcmin.
- Option de frein personnalisée : Prend en charge l'intégration de freins personnalisés pour les articulations qui nécessitent un couple de maintien lorsqu'elles ne sont pas alimentées.
Pour des questions de support technique, de personnalisation ou d'intégration concernant le module d'articulation de petit robot GIM3510-8, veuillez contacter https://rcdrone.top/ ou envoyer un e-mail à [email protected].
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Spécifications
| Paramètre | Unité | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Modèle | - | GIM3510-8 | GIM3510-8 |
| Modèle de carte de pilote | - | GDS34 (SDC101) | GDZ34 |
| Tension nominale | V | 24 | 24 |
| Plage de tension | V | 12–48 | 12–40 |
| Puissance nominale | W | 98 | 60 |
| Couple nominal | N.m | 1.68 | 1.00 |
| Couple de pointe | N.m | 3.41 | 6.02 |
| Vitesse nominale après réduction | tr/min | 430 | 535.5 |
| Vitesse maximale après réduction | tr/min | 529 | 564.6 |
| Courant nominal | A | 4.1 | 2.5 |
| Courant de pointe | A | 8.30 | 25.30 |
| Résistance de phase | ohm | 0.48 | 0.48 |
| Inductance de phase | mH | 0.31 | 0.31 |
| Constante de vitesse | tr/min/V | 22.04 | 23.53 |
| Constante de couple | N.m/A | 0.44 | 0.32 |
| Nombre de paires de pôles | Paires | 7 | 7 |
| Rapport de réduction | - | 8:1 | 8:1 |
| Type de réduction | - | Planétaire | Planétaire |
| Matériau de l'engrenage réducteur | - | ALU | ALU |
| Jeu de l'engrenage réducteur | arcmin | 15 | 15 |
| Poids du moteur sans driver | g | 247.6 | 247.6 |
| Poids du moteur avec driver | g | 259.6 | 259.6 |
| Taille sans driver (diamètre x longueur) | mm | Ø46 x 46.5 | Ø46 x 46.5 |
| Taille avec driver (diamètre x longueur) | mm | Ø46 x 51.5 | Ø46 x 51.5 |
| Charge axiale maximale | N | 75 | 75 |
| Charge radiale maximale | N | 300 | 300 |
| Bruitage | dB | <60 | <60 |
| Communication | - | CAN | CAN |
| Deuxième encodeur sur l'arbre de sortie | - | OUI | OUI |
| Indice de protection | - | IP54 | IP54 |
| Température de fonctionnement | °C | -20 à +80 | -20 à +80 |
| Résolution de l'encodeur (encodeur de pilote) | bit | 14 | 14 |
| Soutien d'encodeur séparé | - | NON | NON |
| Support de frein personnalisé | - | OUI | OUI |
Manuels
- SteadyWin_GIM3510-8_Diagramme_d'installation.stp
- GlM3510-8_dessin_d'installation.pdf
- Gl3510-8_avec_dessin_d'installation_de_frein.pdf
Détails

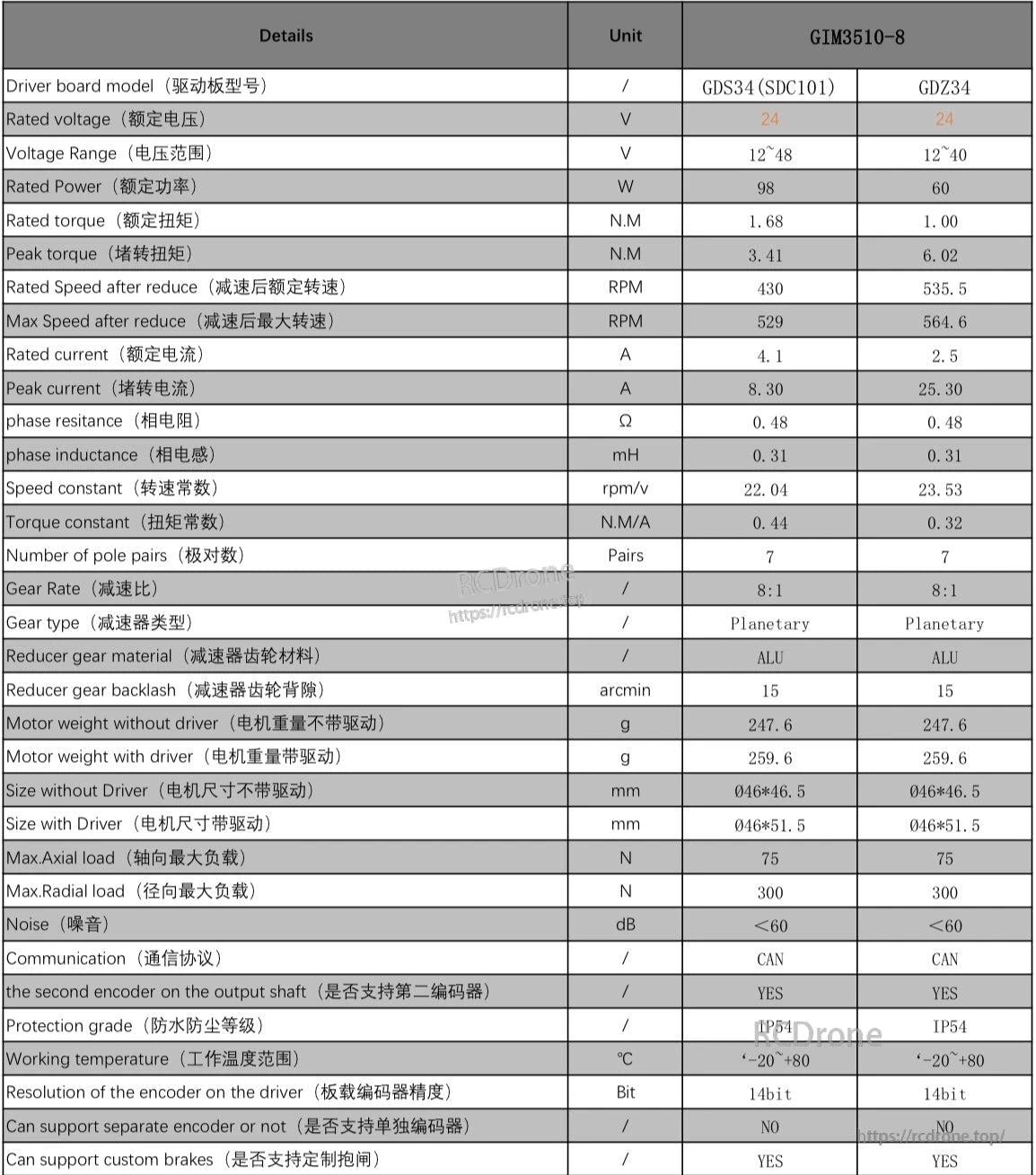
Les spécifications des joints du robot GIM3510-8 comparent les cartes de pilote GDS34 et GDZ34. Les indicateurs clés incluent la tension, la puissance, le couple, la vitesse, le courant, le poids, la taille, la capacité de charge, le bruit, la communication, l'encodeur, le grade de protection, la plage de température et le support de frein personnalisé.
Related Collections









