




Flywoo GOKU GM10 Nano V3 Module GPS avec boussole, M10050 GNSS, 2,6g, 12x17x5mm, 6 broches
Flywoo GOKU GM10 Nano V3 Module GPS avec boussole, M10050 GNSS, 2,6g, 12x17x5mm, 6 broches
FLYWOO
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Flywoo GOKU GM10 Nano V3 est un module GPS nano avec boussole conçu pour des constructions FPV/RC légères. Il dispose d'un facteur de forme nano de 2,6 g, d'un connecteur à 6 broches et d'un câble plug-and-play pour une installation sans soudure.
Selon les informations fournies, la série GM10 V3 utilise la dernière puce GNSS M10050 pour une recherche de satellite plus rapide par rapport à la précédente GM8 V2. Pour de l'aide à la configuration ou des questions de compatibilité, contactez [email protected] or visitez https://rcdrone.top/.
Caractéristiques clés
- Taille nano et poids léger : 2,6 g
- Boussole intégrée
- Plug and play (aucune soudure requise)
- Connecteur à 6 broches
- Module GPS. Trois modules.
Notes de compatibilité
- Remarque : La puce du GPS GOKU GM10 V3 est référencée comme M1005 dans la note fournie. Seul le firmware Betaflight (BF) 4.3.x peut utiliser le protocole Ublox . BF 4.2.x et plus tôt ne peuvent utiliser que le protocole NMEA . La note indique qu'il n'y a pas de différence de performance entre les deux protocoles.
- BETAFLIGHT : utilisez un firmware supérieur à 4.3.0.
- INAV : utilisez le dernier configurateur 6.0.0, et un firmware supérieur à 5.0.0.
Spécifications
| Marque | FLYWOO |
| Modèle | GM10 NANO V3 GPS avec boussole |
| Dimensions | 12mm*17mm*5mm |
| Poids | 2.6g |
| Connecteur | Pad 6 broches |
| Chipset | M10050 (Chip de dixième génération) |
| Format de réception | GPS, GLONASS, Galileo, BeiDou, QZSS et SBAS |
| Protocole par défaut | GPS, Galileo, BeiDou |
| Fréquence | GPS L1, GLONASS L1, BeiDou B1, SBAS L1, Galileo E1 |
| Canaux | 72 canaux de recherche |
| Sensibilité (Suivi) | -162dBm |
| Sensibilité (Récupération) | -160dBm |
| Taux de support | 4800bps à 921600bps (Par défaut 115200bps) |
| Niveau de données | TTL ou RS-232 (Niveau TTL par défaut) |
| Protocole de données | BF4.3.X (UBLOX) / BF4.2.X (NMEA) |
| Fréquence de sortie | 1Hz-10Hz (Par défaut 10Hz) |
| Limite opérationnelle (Altitude) | 50 000 m Max |
| Limite opérationnelle (Vitesse) | 500 m/s Max |
| Limite opérationnelle (Accélération) | Moins de 4g |
| VCC | Tension DC : 3.3-5V |
| Température de fonctionnement | -40 °C ~ +85°C |
| Température de stockage | -40°C ~ +105°C |
| Indicateur | LED PPS : ROUGE. La LED PPS s'allume lorsque le GPS n'est pas fixé et s'éteint lorsqu'il est fixé. |
| Broches du module (texte) | RX, TX, 3.3-5V, GND |
| Étiquettes du pad de la boussole/GPS (diagramme) | T, R, G, V, C, D |
| Étiquettes du pad du contrôleur de vol (diagramme) | TX, RX, GND, 5V, SCL, SDA |
| Étiquette GM10 NANO V3 (BOUSSOLE) (diagramme) | SD-SC-V-G-RX-TX |
Guide d'opération
Options de direction de la boussole (montrées)
- Par défaut
- CW 0°
- CW 90°
- CW 180°
- CW 270°
- Retour à CW 0°
- Retour à CW 90°
- Retour à CW 180°
- Retour à CW 270°
- Personnalisé
Paramètres de Betaflight GPS et mode de secours GPS (montrés)
- Ouvrir le port série : GPS / 115200 bauds.
- Allumez l'interrupteur GPS et définissez le protocole UBLOX/NMEA .
- Définissez le RXLOSS canal de mode de secours (exemple montré : AUX 2 GPS RESCUE, valeur 2000).
- Sélectionnez l'option de mode de secours GPS (valeurs d'exemple montrées) : Angle 32; Altitude initiale (mètres) 50; Distance de descente (mètres) 200; Distance minimale vers la maison (mètres) 100; Vitesse au sol (mètres/seconde) 20.00; Throttle minimum 1100; Throttle maximum 1600; Throttle de maintien 1280; Taux de montée (mètres/seconde) 5.00; Taux de descente (mètres/seconde) 1.50; Satellites minimum 5; Mode d'altitude Altitude maximale; Vérifications de validité Activé.
Ce qui est inclus
- 1x GM10 NANO V3 GPS avec boussole
- 1x Câble de 100 mm
- 1x Feuille de cuivre
Détails
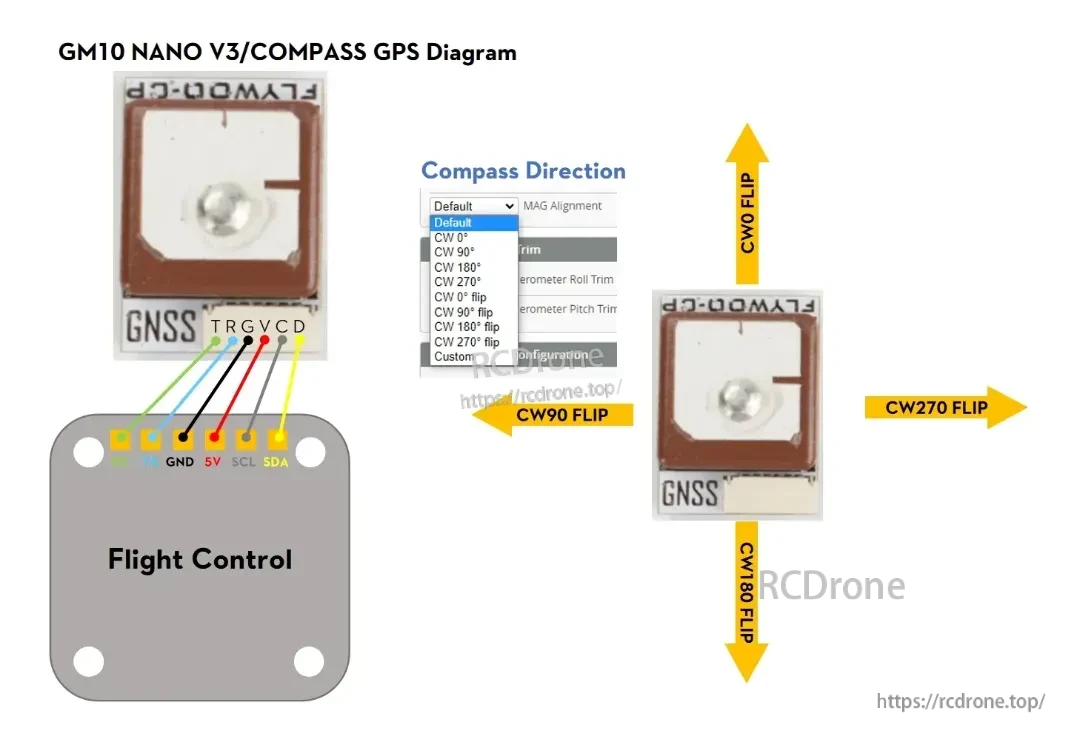
Le câblage du GPS GM10 Nano V3 utilise TX/RX plus 5V et I2C (SCL/SDA), avec des options de direction de la boussole pour différentes orientations de module.

Le Flywoo GOKU GM10 Nano V3 GPS se connecte au contrôleur de vol avec une alimentation 5V et GND plus UART TX/RX, avec SDA/SCL optionnel pour la boussole.

Le Flywoo GOKU GM10 Nano V3 GPS est conçu pour une recherche de satellite plus rapide et prend en charge le suivi de plus de 30 satellites.

Réglez le port série GPS à 115200 bauds et activez l'interrupteur GPS avec le protocole UBLOX/NMEA pour la configuration du mode de secours.

Le mode de secours GPS peut être configuré en assignant un canal AUX pour le GPS RESCUE et en ajustant les paramètres de Retour à la maison dans Betaflight.
Related Collections




