




MAD MAX10 200A HV 6-12s ESC sans balais avec capteur pour voiture RC 1/5
MAD MAX10 200A HV 6-12s ESC sans balais avec capteur pour voiture RC 1/5
MAD
Impossible de charger la disponibilité du service de retrait
Aperçu
MAD MAX10 200A HV est un contrôleur de vitesse électronique (ESC) pour voitures modèles RC 1/5, prenant en charge une entrée LiPo 6–12S et des moteurs sans balais avec contrôle à onde carrée avec ou sans capteur. Il comprend Bluetooth intégré pour le paramétrage via une application mobile, la lecture de données (journal de données et données en temps réel), et la mise à jour du firmware.
Caractéristiques clés
- Courant continu de 200A ; limitation de courant par vagues pour réduire le courant de pointe et aider à éviter les dommages au moteur
- Alimentation LiPo 6–12S (l'utilisation d'une alimentation DC nécessite de prendre en compte la capacité de décharge et de récupération)
- Transmission Bluetooth intégrée : connexion directe à l'application mobile pour le paramétrage, la lecture de données et la mise à jour du firmware
- Fonctionnalité d'enregistrement de données en temps réel intégrée (visualisation des données statiques et en temps réel dans l'application)
- Sortie BEC ajustable via l'application mobile : 6.0V / 7.4V / 8.4V; 8A continu, 25A à court terme (également indiqué comme 8A–25A max / 10–25A max)
- Refroidissement intelligent : la puissance du ventilateur s'active à une température > 55°C et s'éteint à une température < 50°C ; la puissance du ventilateur peut être coupée en cas d'anomalie de courant important
- Capacité d'opération toutes saisons : niveau d'étanchéité IP67 / indice de protection
- Minutage turbo disponible (support max 26°)
- Prend en charge le protocole XC BUS / X.BUS pour le contrôle en temps réel et la lecture des données d'opération via le bus (utilisable pour des scénarios d'automatisation/de contrôle de robot)
- Fonctions de protection énumérées : basse tension, surtension, perte de gaz, freinage anormal, surchauffe, etc.
Pour des questions de configuration ou des vérifications de compatibilité avant l'achat, contactez [email protected] or visitez https://rcdrone.top/.
Spécifications
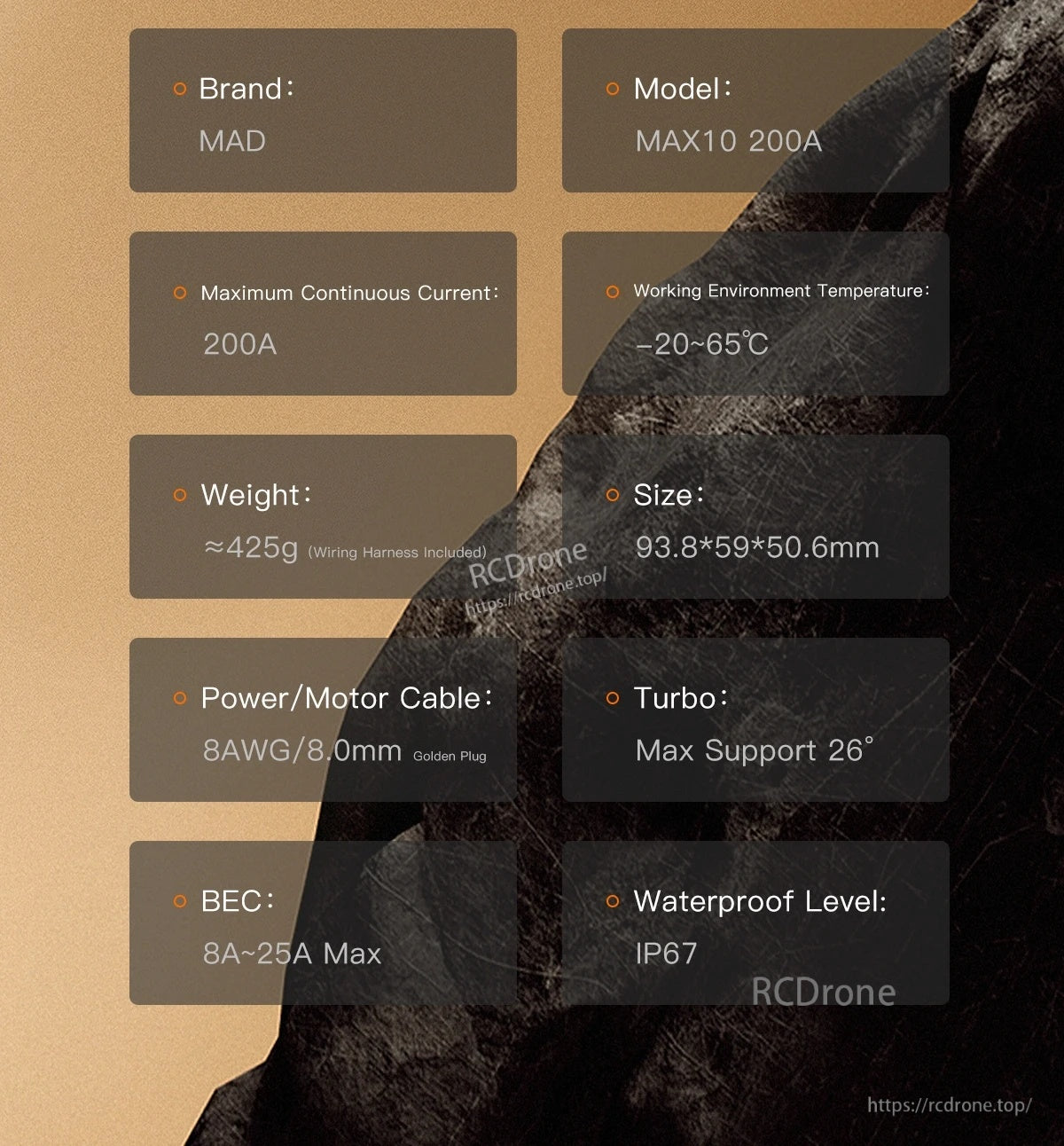
| Marque | MAD |
| Modèle | MAX10 200A |
| Courant continu | 200A |
| Alimentation | 6–12S LiPo |
| Moteur recommandé | Contrôle à onde carrée avec ou sans capteur des moteurs sans balais |
| Remarque sur la vitesse du moteur | Lorsque le nombre de paires de pôles = 1, la vitesse électrique est égale à la vitesse mécanique. Vitesse électrique = Vitesse mécanique × Nombre de paires de pôles = Valeur KV × Tension du bus × Nombre de paires de pôles. Vitesse électrique max : 240 000 tr/min. |
| BEC | Tension : 6.0V / 7.4V / 8.4V (commutable via l'application mobile). Courant : 8A continu, 25A à court terme. (Également indiqué : 8A–25A max / 10–25A max.) |
| Contrôle du ventilateur | Température > 55°C : alimentation du ventilateur activée. Température < 50°C : alimentation du ventilateur désactivée. Le ventilateur est alimenté par BEC. En cas de court-circuit du ventilateur, l'alimentation est coupée et se rétablit en 1 seconde. |
| Bluetooth | Ajustement des paramètres de l'application ; mise à jour du firmware ; observation des données de fonctionnement du moteur (journal de données et données en temps réel) |
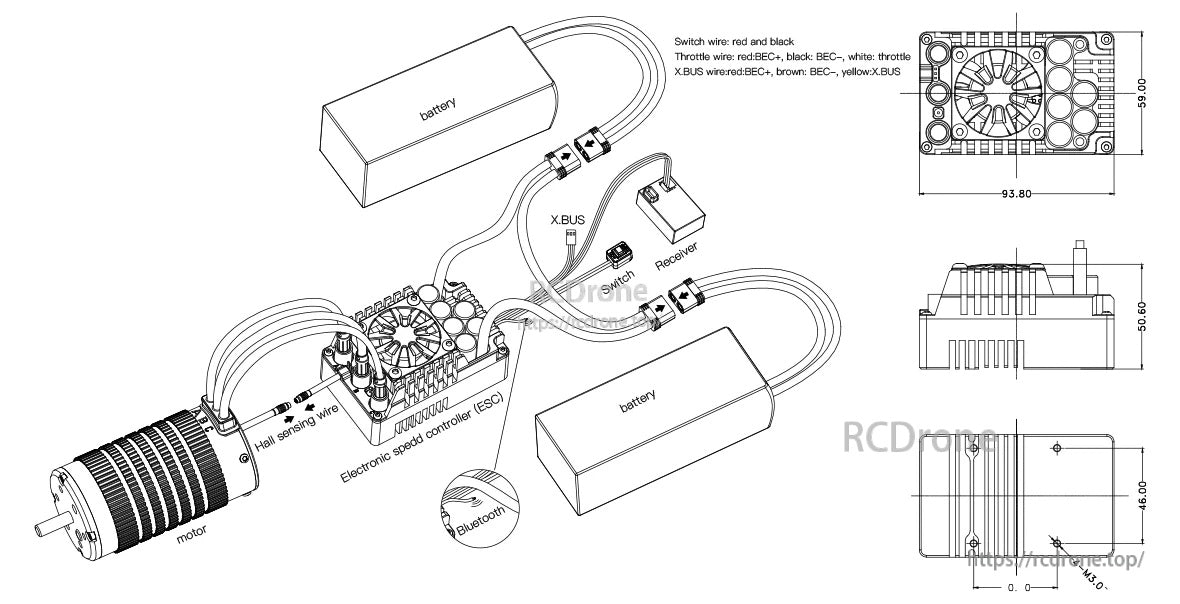
| Dimensions | 93,80(L) × 59,00(l) × 50,60(H) mm (également indiqué comme 93,8 × 59 × 50.6 mm) |
| Poids | ≈406 g (avec fil) / ≈425 g (harnais de câblage inclus) |
| Température de l'environnement de travail | -20 à 65°C |
| Turbo | Support max 26° |
| Niveau d'étanchéité | IP67 |
| Câble d'alimentation/moteur | 8AWG / 8.0 mm Prise Dorée |
Caractéristiques (Détaillées)
- Schéma de commutation méticuleusement prouvé ; commutation fluide même dans des conditions non inductives
- La technologie de roue libre active réduit le chauffage des MOS tout en évitant des impulsions de courant excessives
- La limitation de courant dans chaque cycle PWM réduit l'impact du courant d'impulsion sur le moteur
- Dissipation de chaleur intelligente aide à garantir que le ventilateur fonctionne silencieusement à basse température
- Connexions Bluetooth intégrées à l'application mobile pour la gestion du matériel et le réglage des paramètres
- Interface d'observation des données de l'application mobile pour l'enregistrement des données ESC (données statiques) et les données de débogage en temps réel
- Circuit de conversion DC haute puissance pour une capacité de charge BEC élevée
- Fonctions de protection énumérées : basse tension, surtension, perte de gaz, freinage anormal, surchauffe, etc.
- Temps de turbo disponible
- Aucun besoin d'acheter des modules supplémentaires (contrôleur de vitesse prêt à l'emploi comme décrit)
- Prend en charge le protocole XC BUS : contrôle en temps réel de l'ESC et lecture des données d'opération via le bus ; peut être utilisé pour le contrôle de robots ou d'autres contrôles de programmation automatisée
Connexions (Remarques sur le câblage)
- Fil de commutation : rouge et noir
- Fil de gaz : rouge = BEC+, noir = BEC-, blanc = gaz
- X.BUS fil : rouge = BEC+, marron = BEC-, jaune = X.BUS
- La connexion du fil de détection Hall est utilisée lors de l'exécution d'une configuration avec capteur
Éléments configurables (Paramètres de l'application)
| Séq | Élément | Plage/Options | Par défaut |
| 1 | Mode de fonctionnement | Avancer avec frein / Avancer & Reculer et Frein / Avancer avec recul | Avancer & Reculer et Frein |
| 2 | Cellules Lipo | Auto / 6–12S | Auto |
| 3 | Tension BEC | 6.0V / 7.4V / 8.4V | 6V |
| 4 | Tension de coupure | Désactivé / 2.9–3.6V | 3.2V |
| 5 | Rotation du moteur | Avant / Arrière | Avant |
| 6 | Force de freinage max. | 0–100% | 60% |
| 7 | Max. Force Inverse | 0–100% | 25% |
| 8 | Frappe | 0–12 niveau | 6 niveau |
| 9 | Force de Freinage par Traînée | 0–100% | 0% |
| 10 | Temps de Turbo | 0–26 degré | 26 degré |
| 11 | Délai de Turbo | 0–1 s | 1 s |
| 12 | PWM Initial | 1–10% | 5% |
| 13 | Paires de Pôles de Moteur (article 13) | 2–15% | 10% |
| 14 | Paires de Pôles de Moteur (article 14) | 1–64 | 2 |
| 15 | BUS de Communication | X.BUS Protocole | X.BUS Protocole |
| 16 | X.BUS-ID | 0–15 | 0 |
Règle de nommage Bluetooth
Format du nom Bluetooth : "modèle approximatif" + "-" + "ID de code ESC". Exemple : "XC_E3-1C89" où XC_E3 est le modèle approximatif et "1C-89" est l'ID de code hexadécimal de l'ESC. Si le nom Bluetooth est modifié par l'utilisateur, l'ID de code de l'ESC est toujours conservé pour éviter deux appareils avec le même nom.
Précautions
- Ne pas connecter les fils d'entrée de l'ESC DC+ et DC- à l'envers ; une connexion inversée peut endommager l'ESC. Si l'ESC est endommagé dans ce cas, le service de garantie correspondant ne sera pas fourni.
- Si un capteur Hall est utilisé, vérifiez les fils de phase du moteur et le câblage Hall.
- Pour les moteurs sans capteurs de température, un fonctionnement à haute puissance à long terme peut provoquer une surchauffe.
- Certaines structures mécaniques de moteur ne peuvent pas supporter une haute vitesse ; forcer une vitesse plus élevée peut endommager le moteur.
- Si non utilisé pendant plus d'une heure, débranchez les fils d'alimentation de l'ESC.
- Si des lignes de connexion sont modifiées, vérifiez soigneusement le circuit avant utilisation.Ouvrez lentement l'accélérateur pour confirmer qu'il n'y a pas d'erreurs avant le fonctionnement normal.
Processus de démarrage
- Vérifiez si le circuit est ouvert, en court-circuit ou en mauvais contact.
- Vérifiez si le moteur est bloqué.
- Branchez le câble d'alimentation.
- Allumez le bouton d'alimentation. Lorsque le ton d'invite de la batterie est entendu (décrit dans l'invite de démarrage normal dans la section d'invite lumineuse/sonore), le démarrage est normal. Si l'accélérateur est normal, l'opération de l'accélérateur peut se poursuivre normalement.
Définir la plage de l'accélérateur (procédure)
- Gardez le contrôleur de vitesse électronique (ESC) éteint. Déplacez l'accélérateur au point final de retour. Alimentez l'ESC et attendez que les lumières rouge et verte cessent de clignoter (environ 5 s).
- Déplacez l'accélérateur au point final de l'avant dans les 1 s et maintenez-le, puis attendez que la lumière verte cesse de clignoter.
- Déplacez le throttle en position neutre en moins de 1 seconde et maintenez-le, puis attendez que le voyant rouge cesse de clignoter.
- Le message de succès se répète quatre fois : voyant rouge et voyant vert allumés + bip du moteur "so, mi, do" + voyants rouge/vert éteints + 0,2 seconde de vacance. Paramètre d'échec : aucun signe ; l'ESC s'allume.
Récupérer les paramètres d'usine
Restaurer le Bluetooth aux paramètres d'usine
- Connectez le fil ESC (le fil blanc) à BEC+ (fil rouge).
- Allumez l'ESC.
- Déconnectez-vous de BEC lorsque le voyant vert est éteint et que le voyant rouge est allumé.
- Retirez le court-circuit.
Lorsque le démarrage est activé, l'état Bluetooth est restauré à la valeur d'usine (mot de passe restauré à 1234 et le nom restauré à l'état d'usine). Redémarrez l'ESC. S'il y a une erreur matérielle, le démarrage peut être activé de cette manière pour mettre à niveau le matériel.
Restaurer les paramètres aux paramètres d'usine
Utilisez le bouton Par défaut sur la page des paramètres de l'application.
Statut LED & Instructions de bip
| Catégorie | Description du type | Indication lumineuse | Indication sonore | Remarque |
| Informations de base | Gaz non remis à zéro | La lumière rouge clignote rapidement | Long ton "bip" | La lumière rouge clignote rapidement |
| Informations de base | Signal de gaz perdu | La lumière rouge clignote lentement | Long ton "bip" | Dans un cycle de 2 s |
| Détection de tension | Protection contre basse tension | (Rouge x1, Vert x2) … | Long ton "bip" x1, court ton "bip" x2 | Vérifiez la tension d'entrée ou le réglage du nombre de cellules s'il n'y a pas de "bip" avant la détection du MOSFET. |
| Détection de tension | Protection contre les surtensions | (Rouge x1, Vert x3) … | Nil | La tension est trop élevée ; vérifiez si la tension dépasse la valeur de résistance de l'ESC. |
| Température | Température MOS trop élevée (fonctionnement > 125°C / démarrage > 110°C) | (Rouge x1, Vert x4) … | Long bip x1, court bip x4 | L'ESC peut reprendre un fonctionnement normal lorsque la température descend en dessous de 100°C. |
| Température | Température du condensateur trop élevée (fonctionnement > 105°C / démarrage > 100°C) | (Rouge x1, Vert x5) … | Long bip x1, court bip x5 | L'ESC peut reprendre un fonctionnement normal lorsque la température descend en dessous de 100°C. |
| Paramètres de l'accélérateur | Paramètres d'accélérateur anormaux | (Rouge x1, Vert x7) … | Bip long x1, bip court x7 | Si l'invite anormale persiste après avoir positionné l'accélérateur en neutre, initiez la calibration de l'accélérateur. |
| Anomalie de détection Hall | Anomalie de logique de sortie Hall | (Rouge x1, Vert x8) … | Bip long x1, bip court x8 | Rebranchez le fil Hall. Si l'anomalie persiste, cela peut être un problème de Hall du moteur ; débranchez le fil Hall. |
| Invite de calibration de l'accélérateur | Calibrer la plage basse | (Rouge Vert) … | Rien | Si la calibration est irrégulière/échoue, l'ESC quitte la calibration et entre dans le démarrage normal. |
| Invite de calibration de l'accélérateur | Calibrer la plage haute | (Vert) … | Rien | |
| Invite de calibration de l'accélérateur | Calibrer l'accélérateur au neutre | (Rouge) … | Rien | |
| Invite de calibration de l'accélérateur | Calibration réussie | (Rouge Vert) x4 | (do-mi-sol) x4 | |
| Fonctionnement normal | Tout est normal et aucune action sur l'accélérateur | (Vert) … | Rien | |
| Fonctionnement de l'accélérateur | Normal | Plus l'accélérateur est enfoncé, plus la lumière verte clignote rapidement | Rien | |
| Fonctionnement de l'accélérateur | Le timing du turbo est activé | La lumière verte reste allumée | Rien | |
| Freinage | Freinage | La lumière rouge est allumée | Rien | Lumière rouge éteinte lors du relâchement du frein |
| Démarrage | Entrée forcée dans le démarrage | Rien | Suivez le processus de réinitialisation d'usine Bluetooth | |
| Démarrage | Démarrage en cours | Lumière verte : allumée 2 s & éteinte 2 s ; la lumière rouge reste clignotante | Rien | La durée de la lumière rouge allumée est égale au temps de l'opération de clignotement |
| Démarrage normal | Alerte du nombre de cellules de batterie après démarrage normal | Signal lumineux d'alerte quinaire : ton long avec lumière rouge allumée ; ton court avec lumière verte allumée | do, mi, so + son d'alerte quinaire | Définition quinaire : ton long = 5 cellules ; ton court = 1 cellule. Exemple pour 8S : do, ri, mi + ton long x1 + ton court x3. |
| Avertissement de défaut | Auto-test d'anomalie MOS : circuit ouvert MOS | (Rouge x2) … | Rien | Débranchez le fil du moteur. Si des anomalies persistent, l'ESC doit être inspecté. |
| Avertissement de défaut | Auto-test d'anomalie MOS : court-circuit MOS | (Rouge x2, Vert x1) … | Rien | |
| Avertissement de défaut | Circuit d'échantillonnage de courant anormal | (Rouge x2, Vert x2) … | Rien |
Remarques :
1) La lumière rouge correspond au ton long ; la lumière verte correspond au ton court.
2) Pour économiser de l'énergie, tous les bips durent 5 minutes ; si les défauts se rétablissent, cela prend effet à nouveau dans les 5 minutes suivantes.
3) Les points de suspension "..." dans l'indication lumineuse représentent la répétition de l'action précédente.
Calibration de l'accélérateur (Vidéo)
Détails






Related Collections




