




Moteur SteadyWin GB3510 12V 0,11 N·m 363 tr/min, Type d'encodeur AS5048A/AS5600, Compatible 12/14 bits
Moteur SteadyWin GB3510 12V 0,11 N·m 363 tr/min, Type d'encodeur AS5048A/AS5600, Compatible 12/14 bits
SteadyWin
Impossible de charger la disponibilité du service de retrait
Aperçu
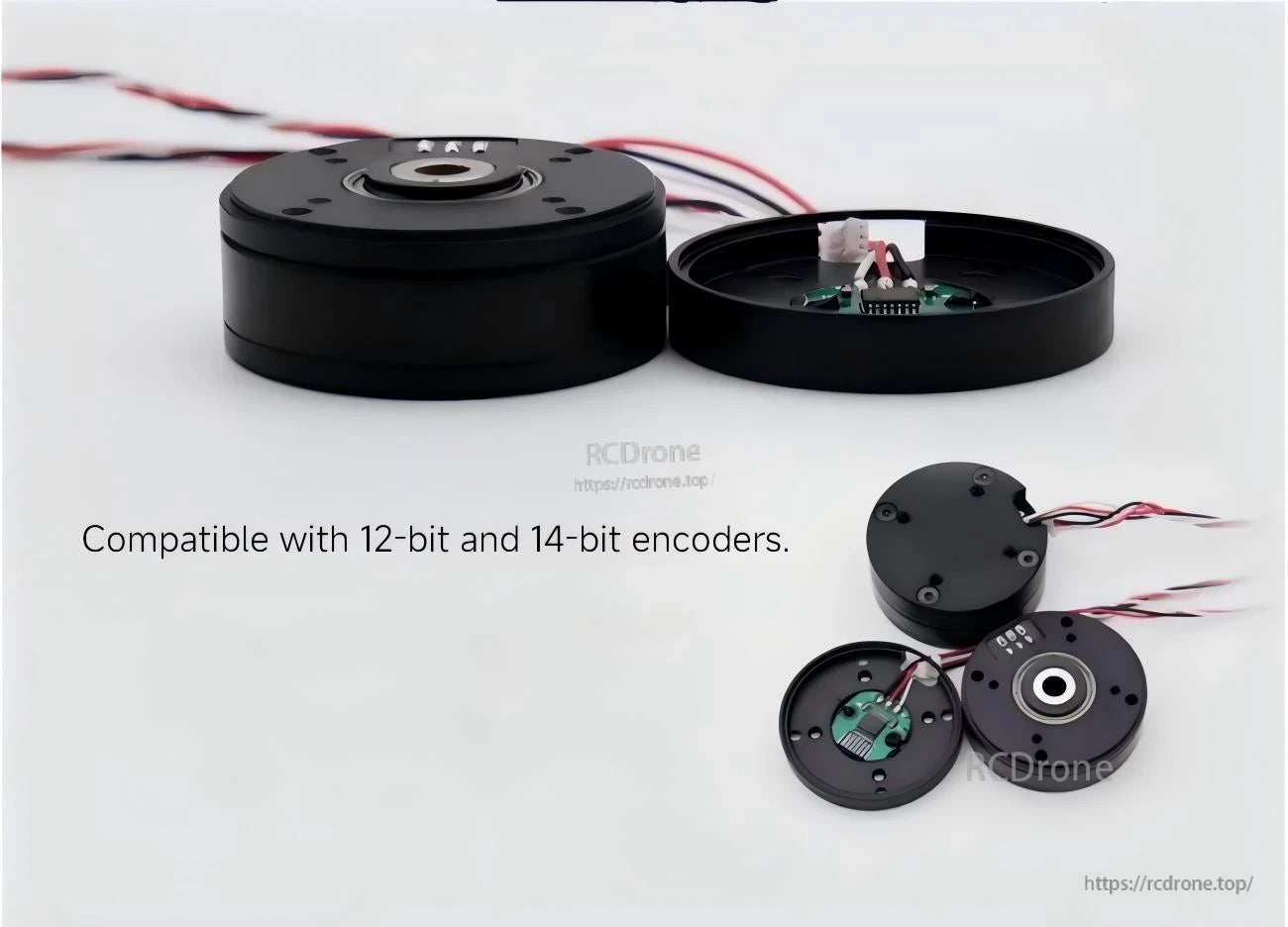
Le moteur SteadyWin GB3510 est un moteur compact conçu pour fonctionner à 12V, destiné aux cas d'utilisation en robotique et en contrôle de mouvement. Il prend en charge les options d'encodeurs AS5048A/AS5600 et est déclaré compatible avec des encodeurs 12 bits et 14 bits.
Caractéristiques clés
- Modèle : GB3510
- Type d'encodeur : AS5048A / AS5600
- Compatible avec des encodeurs 12 bits et 14 bits
- Compatible avec des anneaux collecteurs ; déclaré être largement utilisé dans les stabilisateurs et les pods, et stable à basse vitesse
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Spécifications
| Modèle | GB3510 |
| Tension nominale | 12V |
| Couple nominal | 0.11 N·m |
| Vitesse nominale | 363 RPM |
| Vitesse maximale | 965 RPM |
| Courant nominal | 0.53 A |
| Couple de blocage | 0.16 N·m |
| Courant de blocage | 0.8 A |
| Résistance de phase | 8.8 Ω |
| Nombre de tours de l'enroulement du moteur | 40T |
| Inductance de phase | 3.95Mh |
| Constante de vitesse | 45rpm/v |
| Constante de couple | 0.2N.M/A |
| Inertie du rotor | 81gcm^2 |
| Nombre de paires de pôles | 11 Paires |
| Poids du moteur sans encodeur | 76g |
| Poids du moteur avec encodeur | 89g |
| Température de fonctionnement | 20~80 °C |
| Température maximale de démagnétisation | 120 °C |
| Type d'encodeur | AS5048A/AS5600 |
Notes de dessin mécanique (du diagramme)
- Configurations montrées : avec boîtier d'encodeur / sans boîtier d'encodeur
- Notes sur le motif de trous montrées : 4-M3, 3-M2, 4-M2, 4-M2.5
- Diamètres montrés : φ25, φ30, φ40±0.05, φ20, φ12.6, φ33.5, φ16.6, φ38±0.05
- Dimensions linéaires montrées : 25±0.2, 20±0.2, 19, 20.5, 16, 1, 0.5
Manuels / Fichiers CAD
Pour des questions d'intégration (sélection d'encodeur, câblage ou ajustement mécanique), contactez le support à [email protected] or visitez https://rcdrone.top/.
Détails
Choisissez les options d'encodeur AS5048A ou AS5600 avec compatibilité 12 bits/14 bits pour un contrôle précis à basse vitesse en robotique.

Un facteur de forme compatible avec les anneaux de glissement prend en charge un fonctionnement stable à basse vitesse pour les stabilisateurs, les pods et les constructions de contrôle de mouvement.

Related Collections




