SteadyWin GIM4305-10 Moteur réducteur planétaire — 48W, rapport 10:1, couple nominal 1 N·m, 300–366 tr/min, CAN, IP54 pour actionneurs robotiques
SteadyWin GIM4305-10 Moteur réducteur planétaire — 48W, rapport 10:1, couple nominal 1 N·m, 300–366 tr/min, CAN, IP54 pour actionneurs robotiques
SteadyWin
Impossible de charger la disponibilité du service de retrait
Aperçu
Le moteur réducteur planétaire SteadyWin GIM4305-10 est un moteur réducteur planétaire compact avec un driver SDC101 intégré et une communication CAN. Conçu pour une action précise, l'unité fonctionne à une tension nominale de 24V (plage de 12-36V), délivre 48W de puissance et fournit un couple nominal de 1 N·m (couple de blocage de 3,47 N·m) après une réduction de 10:1. Le GIM4305-10 est classé IP54 et prend en charge un encodeur 14 bits et une connexion d'encodeur séparée ; un support de frein personnalisé est disponible. Les protections intégrées incluent la surveillance de la surchauffe, de la surtension et de la surcharge.
Pour le service client et le support technique, contactez : [email protected] ou visitez https://rcdrone.top/.
Caractéristiques clés
- Réducteur à vis planétaire, rapport 10:1 pour un couple de sortie accru et un contrôle de position.
- Driver SDC101 intégré avec communication CAN pour un contrôle en réseau.
- Vitesse nominale après réduction 300 RPM, maximum 366 RPM.
- Encodeur : intégré 14 bits, prend en charge l'entrée d'encodeur séparée.
- Enveloppe compacte Ø53×26mm et faible masse (140g sans driver ; 150g avec driver).
- Caractéristiques mécaniques : charge axiale max 125N, charge radiale max 500N, jeu de pignon 15 arcmin.
- Plage de température de fonctionnement -20°C à +80°C et bruit acoustique <60 dB.
- Matériau de l'engrenage réducteur : ALU ou ACIER. Support de frein personnalisé disponible.
Spécifications
| Modèle | GIM4305-10 |
| Modèle de driver | SDC101 |
| Tension nominale | 24V (plage 12-36V) |
| Puissance | 48W |
| Couple nominal (après réduction) | 1 N·m |
| Couple de blocage | 3.47 N·m |
| Vitesse nominale (après réduction) | 300 RPM |
| Vitesse max (après réduction) | 366 RPM |
| Courant nominal | 2A |
| Courant de blocage | 5.6A |
| Résistance de phase | 1.15 Ω |
| Inductance de phase | 0.41 mH |
| Constante de vitesse | 15.25 rpm/v |
| Constante de couple | 0.62 N·m/A |
| Nombre de Paires de Pôles | 14 Paires |
| Rapport de Transmission | 10:1 |
| Type de Réducteur | Planétaire |
| Matériau de l'Engrenage Réducteur | ALU ou ACIER |
| Jeu de l'Engrenage Réducteur | 15 arcmin |
| Poids du Moteur (sans Driver) | 140 g |
| Poids du Moteur (avec Driver) | 150 g |
| Taille (sans Driver) | Ø53×26 mm |
| Taille (avec Driver) | Ø53×26 mm |
| Charge Axiale Maximale | 125 N |
| Charge Radiale Maximale | 500 N |
| Bruitage | <60 dB |
| Communication | CAN |
| Deuxième Encodeur | NON |
| Classe de protection | IP54 |
| Température de fonctionnement | -20°C à +80°C |
| Résolution de l'encodeur | 14 bits |
| Support d'encodeur séparé | OUI |
| Support de frein personnalisé | OUI |
Applications
- Robots humanoïdes et articulations robotiques
- Bras robotiques et modules d'actionnement
- Exosquelettes et dispositifs d'assistance portables
- Robots quadrupèdes et articulations de jambes
- Modules de conduite AGV et robotique mobile
- Projets de robots open-source (e.g., Intégration Pupper V3)
Manuels
- Diagramme d'installation GIM4305-10SHS (PDF)
- Schéma de l'interface moteur GIM4305 (PDF)
- SteadyWin_GIM4305_10.stp
Détails
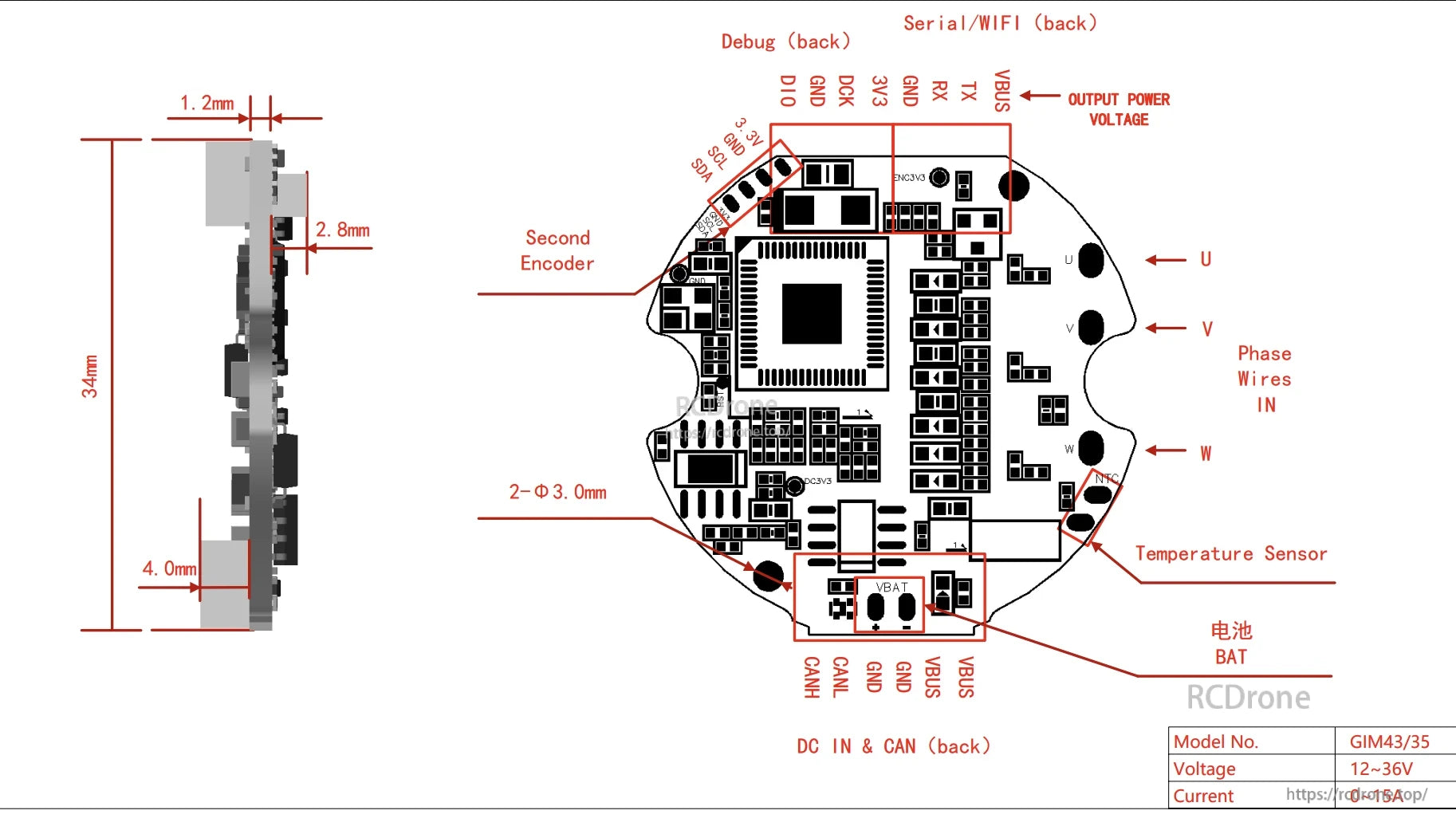
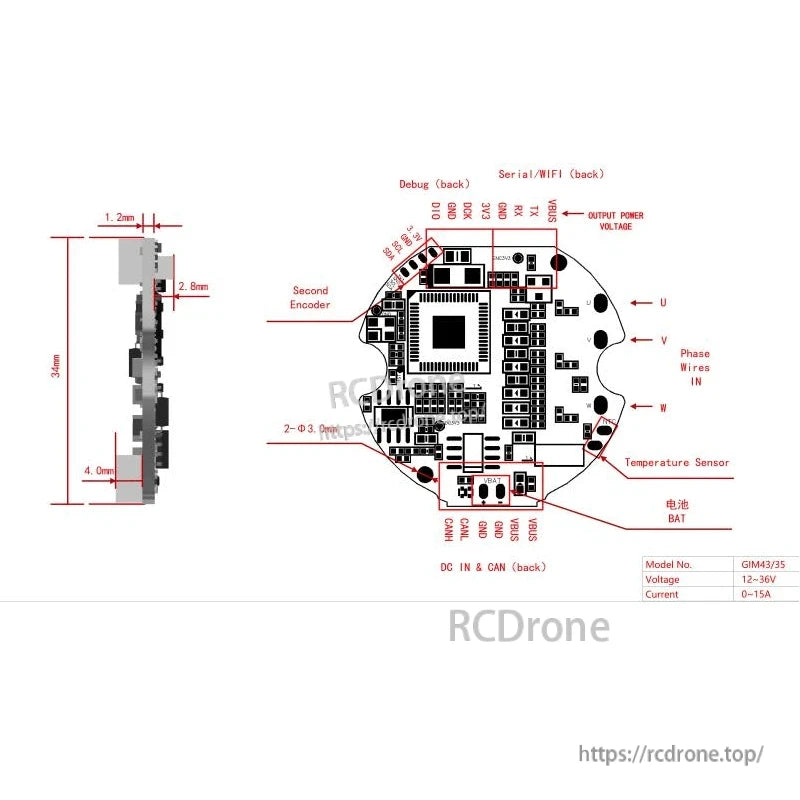
SteadyWin Le diagramme PCB du moteur GIM43/35 montre les connexions, les dimensions et les composants—encodeurs, fils de phase, capteur de température, entrée de batterie, ports de débogage—fonctionnant à 12–36V et 0–15A de courant.
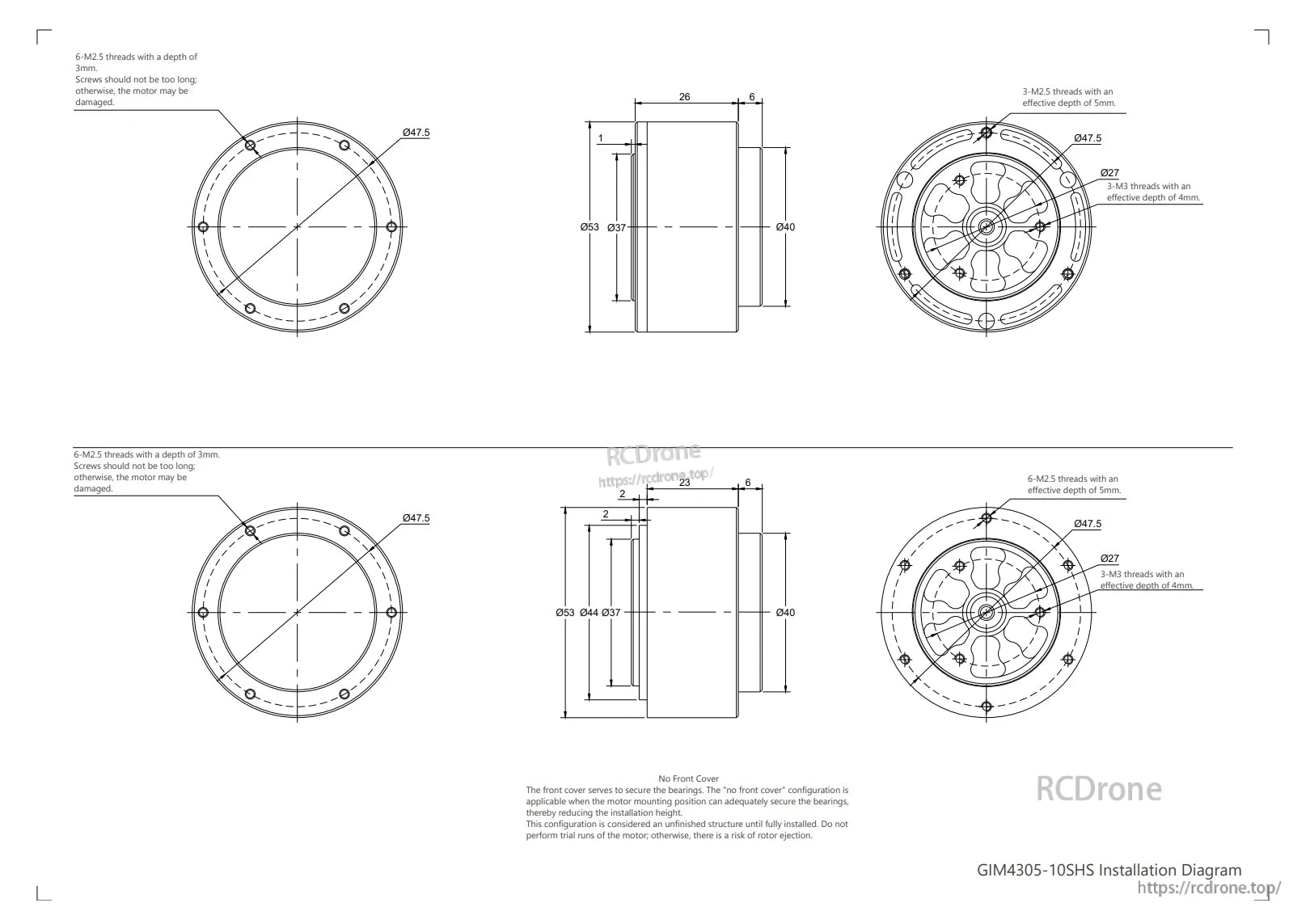
Le diagramme technique pour l'installation du moteur GIM4305-10SHS montre les dimensions, les spécifications de filetage, les avertissements de longueur de vis pour éviter les dommages, et les configurations avec et sans couvercle avant.
Related Collections