





Moteur SteadyWin PM100 24V 1,6N·m 130RPM (290RPM Max) Type d'encodeur AS5048A/AS5600
Moteur SteadyWin PM100 24V 1,6N·m 130RPM (290RPM Max) Type d'encodeur AS5048A/AS5600
SteadyWin
Prix habituel
$117.00 USD
Prix habituel
Prix promotionnel
$117.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
Le moteur SteadyWin PM100 est un moteur 24V conçu pour des applications de conduite et d'articulation en robotique. Il présente un couple nominal de 1,6N·m à 130RPM, avec une vitesse maximale de 290RPM, et prend en charge les types d'encodeurs AS5048A/AS5600.
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Spécifications
| Modèle | PM100 |
| Tension nominale | 24V |
| Couple nominal | 1,6N·m |
| Vitesse nominale | 130RPM |
| Vitesse maximale | 290RPM |
| Courant nominal | 1.75A |
| Couple de blocage | 2N·m |
| Courant de blocage | 3A |
| Nombre de tours de l'enroulement du moteur | 30T |
| Résistance de phase | 3Ω |
| Inductance de phase | 31.5Mh |
| Constante de vitesse | 11rpm/v |
| Constante de couple | 1.13N.M/A |
| Inertie du rotor | 2860gcm^2 |
| Nombre de paires de pôles | 21 Paires |
| Poids du moteur sans encodeur | 454g |
| Poids du moteur avec encodeur | 460g |
| Température maximale de démagnétisation | 120°C |
| Température de fonctionnement | 20~80°C |
| Type d'encodeur | AS5048A/AS5600 |
Dimensions mécaniques / de montage
| Diamètre extérieur | Ø98.5 ±0.05 |
| Diamètre de l'étape | Ø34.8 |
| Modèle de trou A | 6-M3 sur Ø28. |
| Modèle de trou B | 4-M3 sur Ø65 |
| Modèle de trou C | 2-M3 |
| Modèle de trou D | 8-M2.5 sur Ø47 |
| Dimension de référence | 36.5 ±0.2 |
| Dimensions de référence | 28.5; 24.8; 38.1; 14; 5; 2; 1 |
| Sortie de câble d'alimentation | Indiqué sur le dessin |
Pour obtenir de l'aide pour la sélection ou le support à l'intégration, contactez https://rcdrone.top/ ou envoyez un e-mail à [email protected].
Documents
PM100_installation_diagram.pdf
Détails
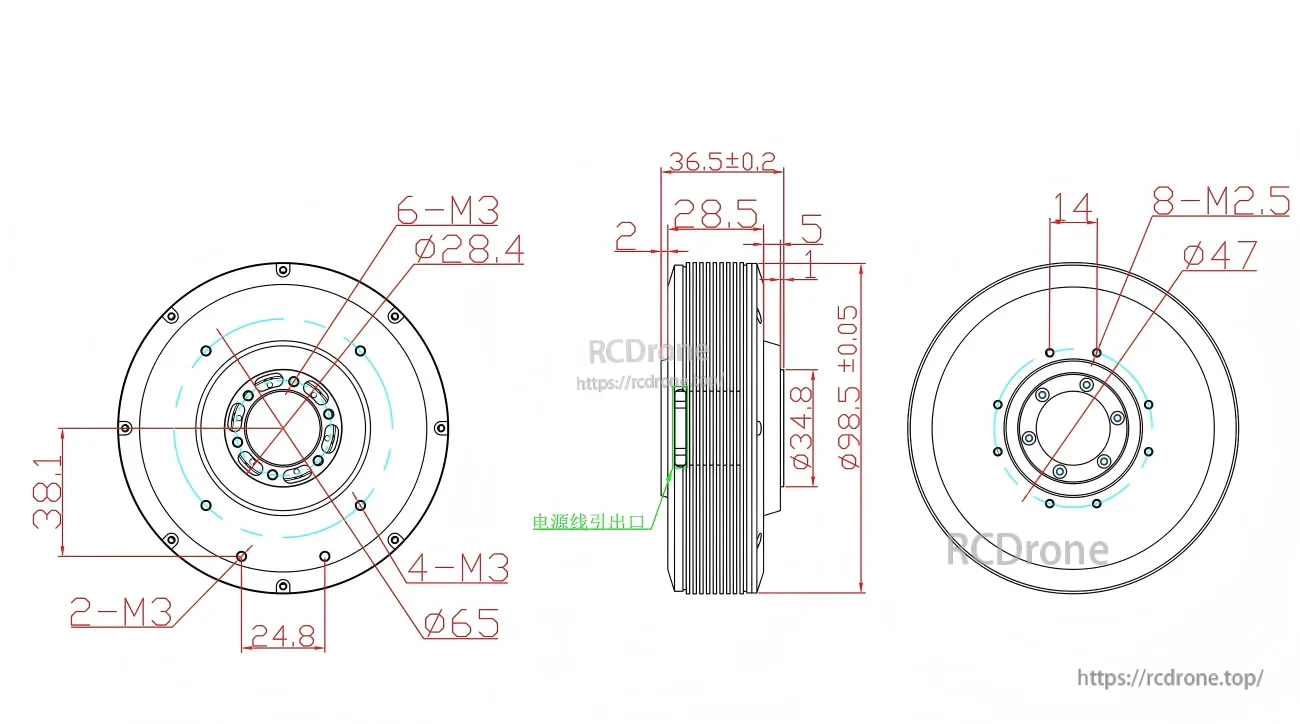
Les dimensions de montage et de dégagement aident à confirmer l'ajustement, y compris le diamètre extérieur de Ø98.5 mm et les modèles de cercle de boulons standard.
Related Collections





