Joint de robot intégré Ti5 CRA-RI50-70-PRO-XX – Engrenage harmonique, arbre creux, 24-48 V 150 W, encodeur 17 bits, CAN/EtherCAT
Joint de robot intégré Ti5 CRA-RI50-70-PRO-XX – Engrenage harmonique, arbre creux, 24-48 V 150 W, encodeur 17 bits, CAN/EtherCAT
Ti5 Robot
Impossible de charger la disponibilité du service de retrait
Aperçu
Le robot Ti5 CRA-RI50-70-PRO-XX est une articulation robotique intégrée compacte à arbre creux qui combine un réducteur d'harmoniques de précision, moteur couple sans cadre, entraînement FOC, et codeur absolu en un seul module. Avec un diamètre extérieur de 80 mm, trou traversant de 10 mm, Puissance de 150 W, et 24–48 V approvisionnement, il livre jusqu'à 34 N·m de crête (dépendant du rapport) avec jeu quasi nul et faible bruit. La communication est sélectionnable entre PEUT et EtherCAT; encodeurs simples ou doubles et un frein électromagnétique Des variantes (-B) sont disponibles. Cette articulation est conçue pour les cobots, les manipulateurs mobiles, les cardans panoramiques et inclinables, les équipements industriels, les robots d'inspection de puissance et les plateformes marines.
Caractéristiques principales
-
Joint tout-en-un: réducteur d'harmoniques + moteur couple BLDC + driver FOC + codeur absolu dans un corps compact scellé.
-
arbre creux: Passage central de 10 mm pour câbles/conduites d'air.
-
Rétroaction de haute précision: Codeur absolu 17 bits, mémoire multi-tours hors tension ; encodeur simple/double options.
-
Sortie à faible jeu: étage harmonique avec ~10–20 secondes d'arc jeu (par rapport).
-
Calme & lisse:moteur couple à grand nombre de pôles pour une stabilité à basse vitesse et un faible bruit acoustique.
-
Options d'interface: PEUT ou EtherCAT bus; facultatif frein de maintien (suffixe du modèle -B).
-
Personnalisable:versions étanches/basse température disponibles en usine.
Modèles &et options
-
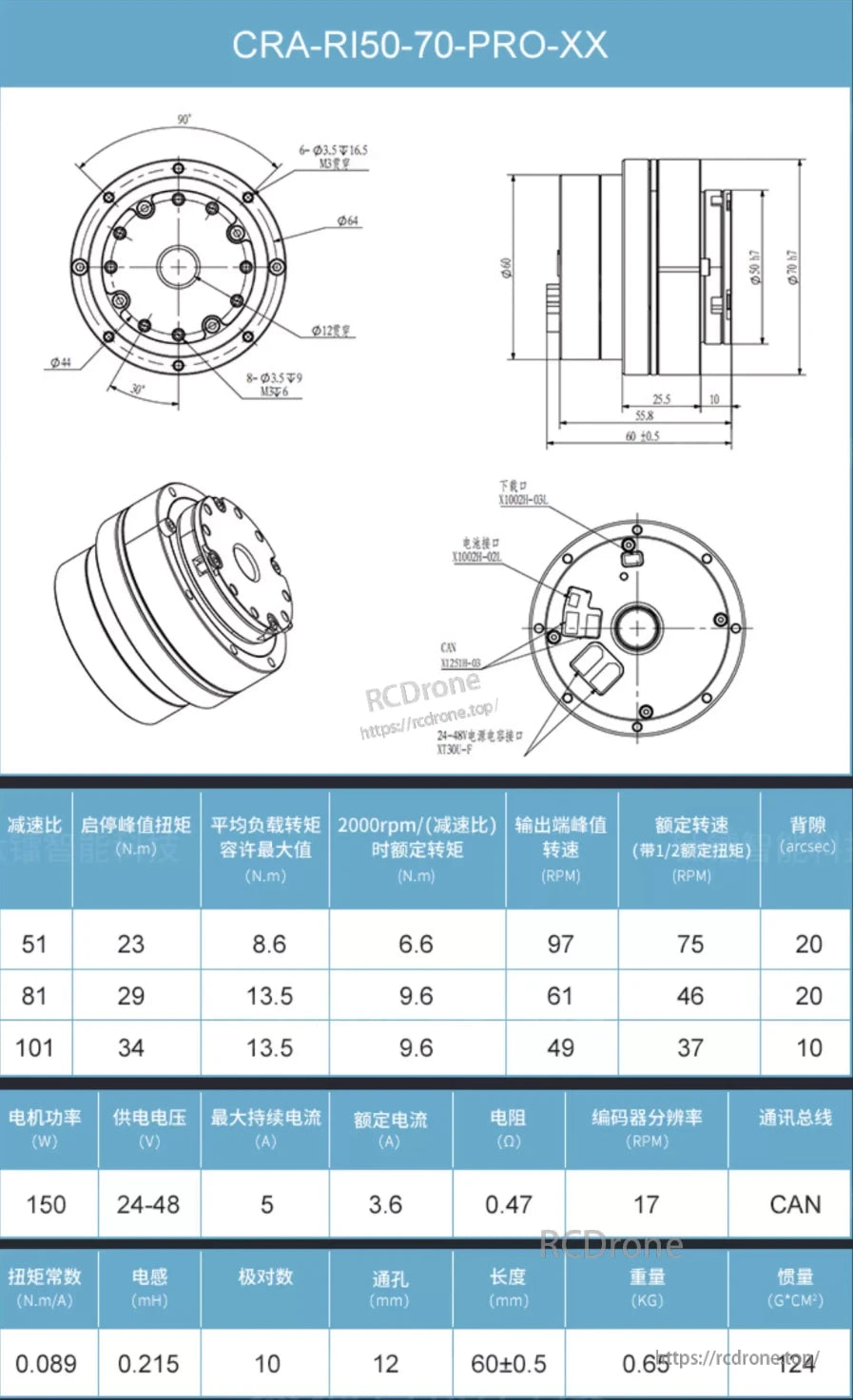
CRA-RI50-70-PRO-XX - standard, pas de frein (≈ 60 ± 0,5 mm longueur, ≈0,65 kg, inertie ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — avec frein (longueur ≈81,7 ± 0,5 mm)
-
Bus: PEUT ou EtherCAT
-
Encodeur: Célibataire ou Double encodeur
Performances nominales par rapport de démultiplication
| Rapport de démultiplication | Couple maximal de démarrage/arrêt (N·m) | Couple de charge moyen maximal (N·m) | Couple nominal @ 2000 tr/min/rapport (N·m) | Vitesse de sortie maximale (tr/min) | Vitesse nominale à ½ tr/min | Jeu (arc-sec) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13,5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13,5 | 9.6 | 49 | 37 | 10 |
Remarques : Les valeurs de vitesse et de couple de sortie sont celles indiquées à la sortie du réducteur. Un jeu d'engrènement inférieur s'applique à la variante 101:1.
Électrique & Données du moteur
-
Pouvoir: 150 W
-
Tension d'alimentation: 24–48 V CC
-
Courant continu maximal: 5 A | Courant nominal: 3,6 A | Résistance de phase: 0.47 Ω
-
Constante de couple: 0,089 N·m/A | Inductance: 0,215 mH | Paires de pôles: 10
-
Résolution de l'encodeur: 17 bits absolus (mémoire hors tension)
-
Contrôle orienté champ (FOC) intégré
Interface mécanique
-
Diamètre extérieur: Ø80 mm
-
Cercle de boulons: Ø64 mm (bride avant)
-
Trou traversant: Ø10 mm
-
Longueur totale: 60 ± 0,5 mm (standard) / 81,7 ± 0,5 mm (-B avec frein)
-
Masse: ~0,65 kg (standard)
-
Inertie (rotor): ~124 g·cm² (standard)
-
La face avant fournit plusieurs fixations M3 ; modèle de trou détaillé selon le dessin mécanique.
Connectivité
-
Bus: PEUT ou EtherCAT
-
Variantes: Encodeur unique / Double encodeur
-
Option de freinage: -B les modèles incluent un frein de maintien intégré.
Applications typiques
-
Bras robotiques collaboratifs et de bureau, robots de service
-
Cardans panoramiques et systèmes de caméras
-
Véhicules utilitaires sans pilote (UGV) mobiles de manipulation et d'inspection de puissance
-
Modules d'automatisation industrielle et équipements marins
Ce qui est inclus
-
Joint intégré CRA-RI50-70-PRO-XX (rapport sélectionné &et options)
-
Connecteurs d'accouplement & vis de base (par kit)
-
Dessin mécanique & brochage (numérique)
Code de commande (exemple)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: rapport de démultiplication (51/81/101)
-
B: avec frein (vide = pas de frein)
-
T/2E: options d'encodeur simple/double
-
IPXX: indice d'étanchéité en option (sur demande)
Détails

Spécifications de l'articulation robotique CRA-RI50-70-PRO-XX : moteur 150 W, 24-48 V, bus CAN, rapports de démultiplication 51-101, couple maximal jusqu'à 34 N.m, longueur 60 ± 0,5 mm, poids 0,65 kg, inertie 124 g·cm².
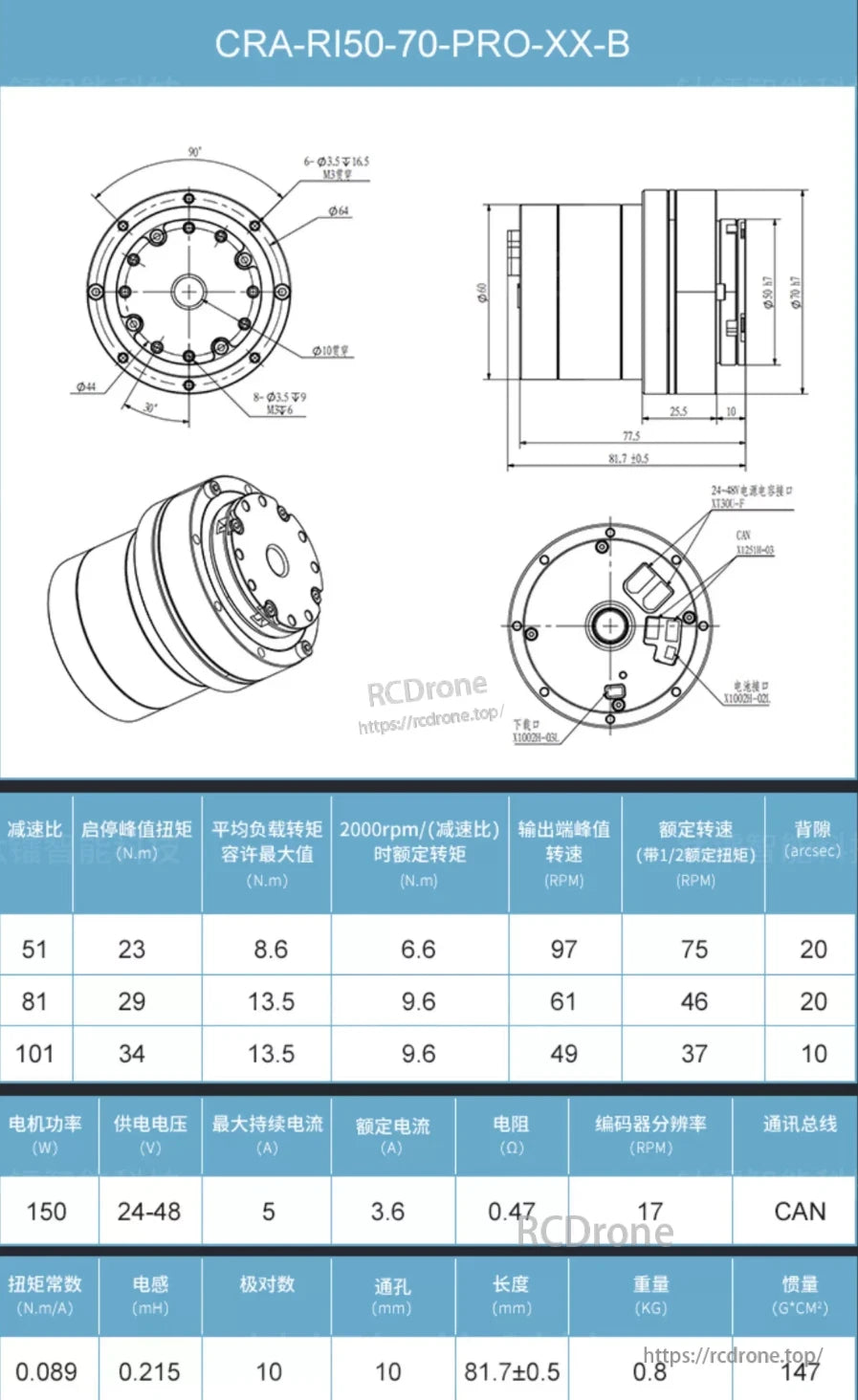
Articulation robotique avec rapports de démultiplication de 51, 81 ou 101, puissance de 150 W, alimentation 24–48 V, communication CAN, résolution d'encodeur de 17 tr/min, longueur de 81,7 ± 0,5 mm et poids de 0,8 kg.
Related Collections