






Actionneur commun intégré Ti5 Robot CRA-RI100-142-PRO-XX, 1 kW, 24-48 V, jusqu'à 169 N·m, IP65, CAN/EtherCAT, 51-161:1, frein en option
Actionneur commun intégré Ti5 Robot CRA-RI100-142-PRO-XX, 1 kW, 24-48 V, jusqu'à 169 N·m, IP65, CAN/EtherCAT, 51-161:1, frein en option
Ti5 Robot
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Robot Ti5 CRA-RI100-142-PRO-XX est un actionneur articulé compact et intégré combinant un servomoteur à aimant permanent, un réducteur de précision, un codeur et un boîtier étanche. Il fait partie de la série PRO, conçue pour humanoïdes, exosquelettes, cobots, AGV et mécanismes industriels, mettant en vedette densité de couple élevée, faible bruit et protection IP65. L'interface du contrôleur est sélectionnable (CAN ou EtherCAT), les commentaires peuvent être encodeur simple ou double, et un frein de maintien est disponible en option. Un arbre creux de 32 mm simplifie le routage des câbles ou des pneumatiques à travers le joint.
Caractéristiques principales
-
Couple nominal jusqu'à 169 N·m (dépendant du rapport) avec une sortie fluide et à faible oscillation
-
Étanchéité IP65 boîtier pour un fonctionnement résistant à la poussière et à l'eau
-
24–48 V CC, 1 kW PMSM de classe à haut rendement
-
CAN ou EtherCAT bus de terrain; codeur incrémental simple/double (17 bits)
-
Frein de maintien en option (-B) pour un positionnement sûr et un maintien hors tension
-
Sortie à arbre creux (Ø32 mm); compatible avec le câblage traversant
-
Longue vie & haute fiabilité; faible bruit, haute précision
-
Faisceau pré-câblé (5 m) pour une intégration rapide
Caractéristiques
Électrique & Général
-
Modèle: CRA-RI100-142-PRO-XX (-B = avec frein)
-
Type de moteur: Synchrone à aimant permanent
-
Puissance nominale: 1000 W
-
Tension d'alimentation: 24–48 V CC
-
Courant nominal: 15,8 A | Courant continu maximal : 16,9 A
-
Résistance de phase : 0,12 Ω | Inductance: 0,3 mH
-
Paires de pôles : 8 | Constante de couple : 0,175 N·m/A
-
Encodeur: Incrémental, 17 bits, simple ou double
-
Bus: PEUT (EtherCAT sélectionnable)
-
Protection: IP65
-
Plage de rotation : 60°
-
Trou traversant : Ø32 mm
-
Environnement de fonctionnement : jusqu'à 60 °C
-
Longueur du câble : 5 m
Enveloppe mécanique
-
Sans frein : Longueur 95,7 ± 0,5 mm, masse 3,8 kg, inertie du rotor 3601 g·cm²
-
Avec frein (-B) : Longueur 115,7 ± 0,5 mm, masse 4,5 kg, inertie du rotor 4237 g·cm²
Remarque : « 100-142 » dans le nom du modèle désigne la classe de diamètre extérieur nominal et la série de longueurs axiales.
Performances par rapport de réduction — Sans frein
| Rapport | Couple maximal de démarrage/arrêt (N·m) | Couple de charge moyen maximal admissible (N·m) | Couple nominal à 2 000 tr/min/rapport (N·m) | Vitesse de sortie maximale (tr/min) | Vitesse nominale à ½ couple nominal (tr/min) | Contrecoup (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Performances par rapport de réduction — Avec frein (-B)
Les valeurs de couple et de vitesse sont identiques à celles de la version sans frein ; les dimensions/poids/inertie diffèrent (voir ci-dessus).
| Rapport | Couple maximal de démarrage/arrêt (N·m) | Couple de charge moyen maximal admissible (N·m) | Couple nominal à 2 000 tr/min/rapport (N·m) | Vitesse de sortie maximale (tr/min) | Vitesse nominale à ½ couple nominal (tr/min) | Contrecoup (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Applications
-
Robots humanoïdes : articulations épaule/hanche/genou/cheville nécessitant un actionnement étanche à couple élevé
-
Robots collaboratifs (cobots) : mouvement fluide et silencieux avec redondance du codeur
-
Exosquelettes &appareils de rééducation et de rééducation : joints compacts à couple élevé avec maintien hors tension (-B)
-
Cardan &unités panoramiques et inclinables : positionnement précis avec faible jeu
-
AGV &et machines spéciales : robuste IP65 joints pour sites poussiéreux ou humides
-
Automobile &et mécanismes marins : actionnement scellé pour systèmes de mouvement auxiliaires
Détails

Spécifications de l'actionneur CRA-RI100-142-PRO-XX : rapports de démultiplication 51-161, 267-459 N.m Couple maximal, moteur 1000 W, alimentation 24-48 V, bus CAN, poids 3,8 kg, inertie 3601 g·cm², résolution du codeur 17 tr/min.
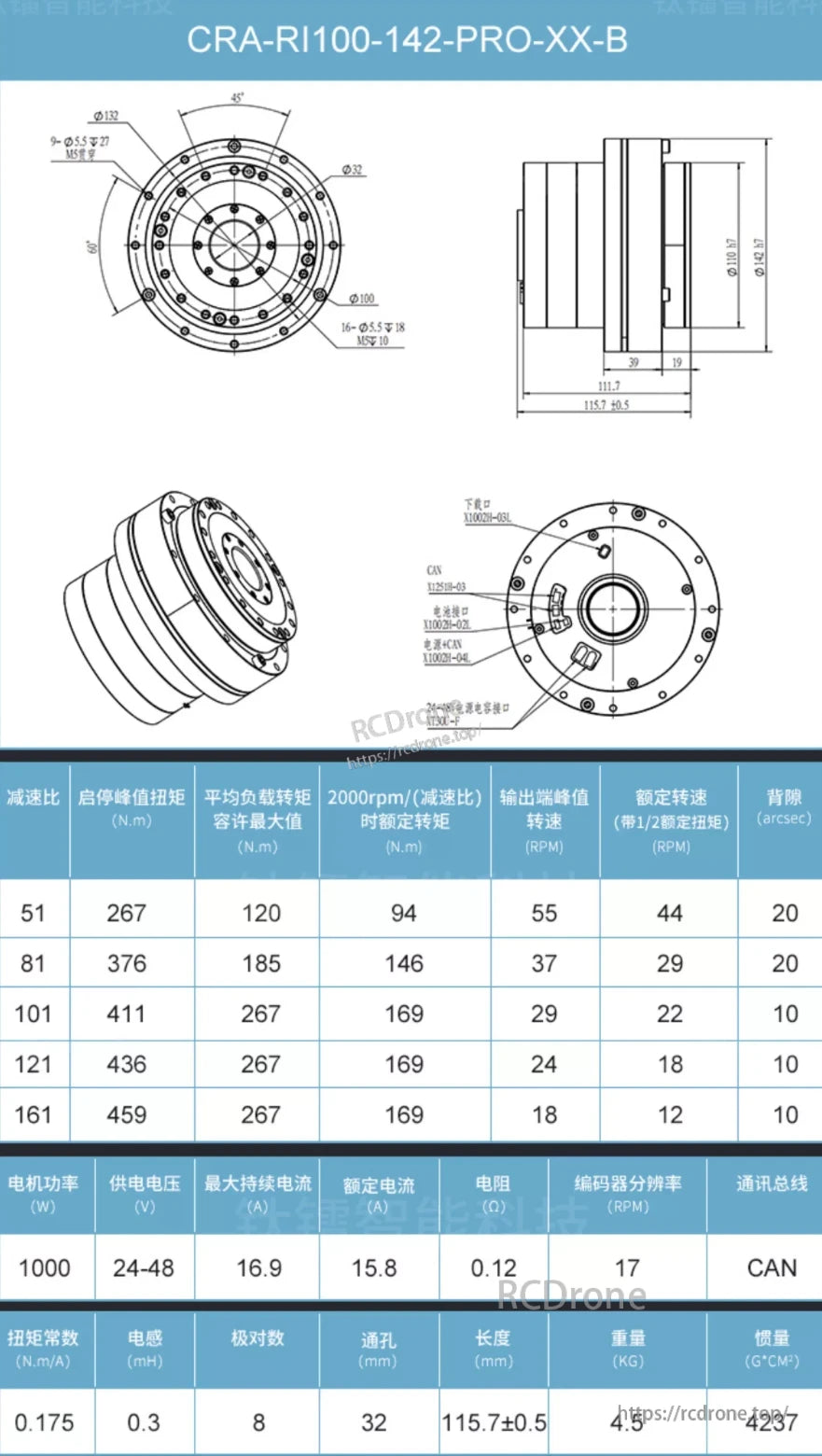
Spécifications de l'actionneur CRA-RI100-142-PRO-XX-B : moteur 1000 W, 24-48 V, courant nominal 15,8 A, résolution d'encodeur 17 tr/min, bus CAN, poids 4,5 kg, longueur 115,7 mm, plusieurs rapports de démultiplication avec données de couple et de vitesse.
Related Collections






