



Actionneur articulé de robot intégré Ti5 Robot CRA-RI40-52-PRO-XX, entraînement harmonique, 7 N·m, 24-48 V, CAN/EtherCAT, IP65, arbre creux, encodeur simple/double (option de freinage)
Actionneur articulé de robot intégré Ti5 Robot CRA-RI40-52-PRO-XX, entraînement harmonique, 7 N·m, 24-48 V, CAN/EtherCAT, IP65, arbre creux, encodeur simple/double (option de freinage)
Ti5 Robot
Impossible de charger la disponibilité du service de retrait
Aperçu
Le robot Ti5 CRA-RI40-52-PRO-XX est un module d'articulation compact et intégré combinant un moteur couple sans cadre, un réducteur harmonique de précision, un servomoteur et un codeur magnétique dans une unité IP65. Avec une alimentation de 24 à 48 V CC et une puissance nominale de 90 W, il délivre un couple nominal de 7 N·m et une vitesse de sortie nominale de 80 tr/min pour les robots humanoïdes, les exosquelettes, les bras collaboratifs, les cardans, les AGV et autres applications haut de gamme. Un passage central permet le routage des câbles ; des configurations à un ou deux codeurs et une option de frein de maintien sont disponibles. La communication est CAN par défaut, avec EtherCAT sélectionnable.
Caractéristiques principales
-
Moteur intégré + variateur + réducteur d'harmoniques + codeur (magnétique)
-
Couple nominal 7 N·m ; vitesse de sortie nominale 80 tr/min ; puissance 90 W
-
Deux rapports de réduction : 51:1 ou 101:1
-
Haute précision : codeur 17 bits, jeu typique 40 arcsec (51)/30 arcsec (101)
-
Conception à faible bruit, faible encoche et haute densité de couple
-
Protection IP65 ; basse température en option &personnalisation étanche
-
Bus de communication : CAN (standard) ou EtherCAT (en option)
-
Options d'encodeur simple/double ; versions avec ou sans frein
-
Trou traversant pour câblage : 12 mm (standard)/11 mm (frein)
-
Applications typiques : humanoïdes, articulations de cobots, exosquelettes, panoramiques et inclinaisons, équipements industriels, robots d'inspection de puissance, systèmes marins/véhicules
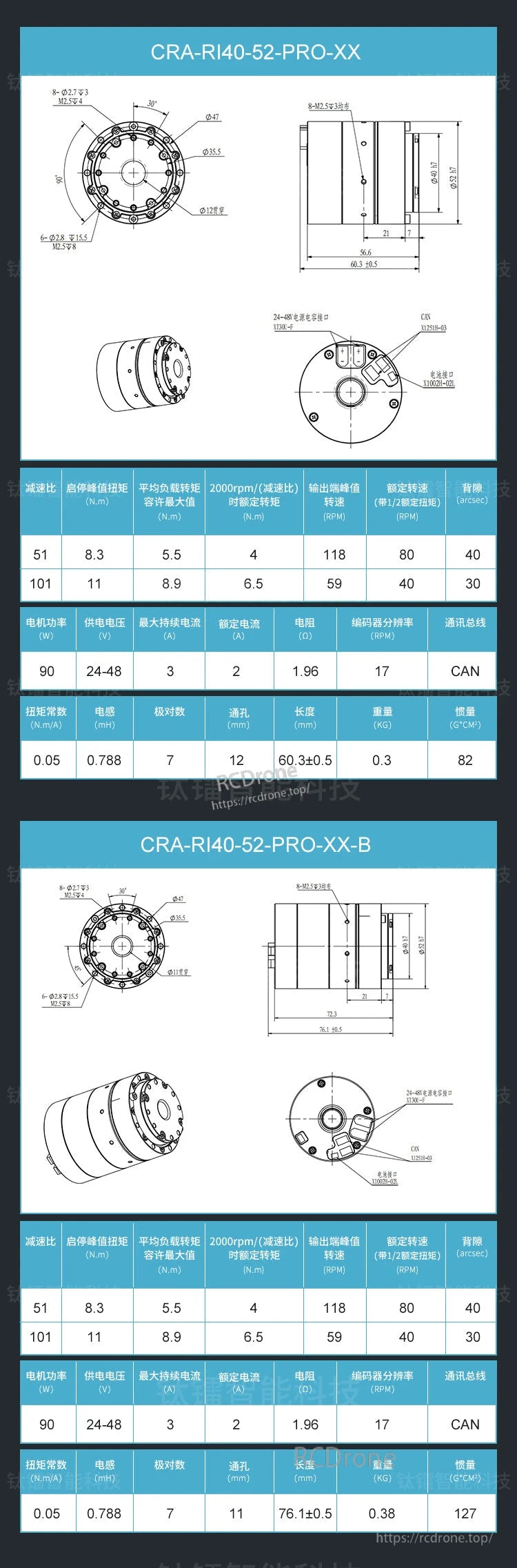
Performances par rapport de démultiplication
| Article | 51:1 | 101:1 |
|---|---|---|
| Couple maximal de démarrage/arrêt (N·m) | 8.3 | 11 |
| Couple de charge moyen max. admissible (N·m) | 5.5 | 8,9 |
| Couple nominal à 2 000 tr/min/(ratio) (N·m) | 4 | 6,5 |
| Vitesse de sortie maximale (tr/min) | 118 | 59 |
| Vitesse nominale à ½ couple nominal (tr/min) | 80 | 80 |
| Contrecoup (arcsec) | 40 | 30 |
Spécifications électriques
-
Tension d'alimentation: 24–48 V CC
-
Courant nominal/continu : 2 A (max 3 A continu)
-
Résistance de phase : 1,96 Ω
-
Inductance: 0,788 mH
-
Constante de couple : 0,05 N·m/A
-
Paires de pôles : 7
-
Résolution de l'encodeur : 17 bits (magnétique)
Mécanique &et; Interface
-
Degré de protection : IP65
-
Vitesse de sortie nominale : 80 tr/min
-
Communication: PEUT (défaut)/EtherCAT (option)
-
Trou traversant (pour le câblage) : Ø12 mm (standard)/Ø11 mm (avec frein)
-
Longueur & inertie (sans frein) : 60,3 ± 0,5 mm, 82 g·cm²
-
Longueur & inertie (version frein -B) : 76,1 ± 0,5 mm, 127 g·cm²
-
Masse: 0.3 kg
-
Longueur du câble : 5 m
-
Température ambiante de fonctionnement (typique) : jusqu'à 60 °C
-
Matériaux : composants en aluminium avec réducteur d'harmoniques de précision
Variantes &et options
-
Communication: CAN ou EtherCAT
-
Encodeur: codeur magnétique simple ou double
-
Frein: sans frein (standard) ou -B version avec frein de maintien
-
Environnement: pack d'étanchéité et de basse température personnalisable
-
Notation des séries : CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (indique le réducteur, le nombre de capteurs/codeurs de couple, le rapport, la protection, etc.)
Applications typiques
Articulations humanoïdes (épaule/coude/hanche/genou), bras robotisés collaboratifs, actionneurs d'exosquelette, cardans panoramique/inclinaison/vision, axes d'automatisation industrielle, UGV/AGV d'inspection de puissance et mécanismes auxiliaires marins/véhicules.
Notes
-
Installer en utilisant les modèles de vis et les tolérances spécifiés indiqués dans les dessins.
-
Confirmez le rapport, la configuration de l'encodeur, le bus de communication et les exigences de freinage avant de commander.
-
En raison de la nature industrielle de ce produit, les unités installées/utilisées ne sont généralement pas retournables ; consultez les documents de dimensionnement avec le personnel technique avant l'achat.
Détails
L'actionneur d'articulation de robot Ti5 CRA-R140-52-PRO-XX et -B offre une puissance de 90 W, une alimentation de 24 à 48 V, un courant maximal de 3 A, une résolution d'encodeur de 17 tr/min, un couple, une vitesse et une communication CAN.

L'actionneur d'articulation de robot Ti5 modèle CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) comprend un frein, un capteur de couple, des encodeurs doubles, un indice d'étanchéité, un rapport de réduction, un diamètre extérieur et un type de moteur.

Actionneurs articulés série PRO pour robots humanoïdes, exosquelettes, robots collaboratifs, automobiles et AGV. Caractéristiques : robustesse élevée, longue durée de vie, densité de couple élevée, faible couple de cliquetis, étanchéité, anti-poussière, antidéflagrant, faible bruit, haute précision, conception à arbre creux.
Related Collections



